-
对话理想自动驾驶副总裁:给理想VLA新画的4个饼以及值得留意的5点(2025-11-09)
- 郎咸朋
- 短期:现在致力于打造训练的强化闭环
- 目前的版本没有实现训练的强化闭环。强化闭环出来后,不用用户说,系统自己就知道哪有问题。今天这个用户接管,明天那个用户开车顿挫、急刹车,系统会自动收集问题,数据回传后自动强化训练,迭代完就上线。
- 经过1-2年时间,可以更清楚的知道车端算力需求与模型参数量需求,郎倾向于不会要求太大。
- 郎给的锚点是车端1000或2000tops,云端32B,并认为320B蒸馏成4B很不合适。

-
3D相机及双目AI相机的详细使用教程(2025-11-11)
-
新法规拟设五秒红线,零百加速就是失控元凶?(2025-11-14)
- 《机动车运行安全技术条件》修订意见稿拟设定多项严苛安全条款,包括限制车辆默认模式下零百加速不得小于5秒、限制动能回收减速度≤0.8m/s²、禁止张贴遮阳膜等,旨在应对电动车大马力时代带来的失控风险。
- "原则上,减速度越快,单位时间内转化的电能越多。但减速度太快,刹车就会介入。每款车的情况不同,但最高效率的动能回收,大概在1.5m/s²水平"。
- 新修订意见稿中的0.8m/s²条件,可以理解为,动能回收将不再带来「拖拽感」。
-
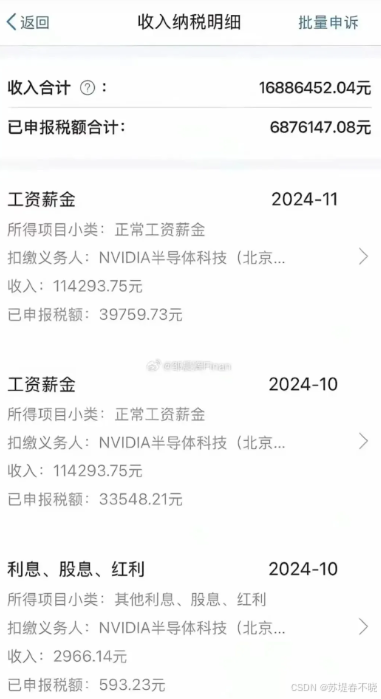
英伟达北京员工晒出了工资条,总薪酬1688万,个税687万,月薪11.43万,基础年薪100万,剩下全是股票分红...(2025-11-15)
-
楼天城:VLA帮不了L4(2025-11-16)
- 在观看Master(AlphaGo的升级形态)下棋时,如果出现了不理解的招数,他会下意识觉得是因为「身为人类的自己太蠢了」。
- 在他看来,现阶段的L4自动驾驶也步入了这一阶段------Robotaxi的决策和轨迹开始变得不易被人理解。
- 他指出,从VLA模型的属性来看,它相当于一个「全科大夫」,可追求极端安全的L4需要的是「专科大夫」。
- "不是因为技术不通用,而是因为我觉得自动驾驶是机器人领域最容易落地的东西。如果连这点都做不到,其他也无从谈起。"

-
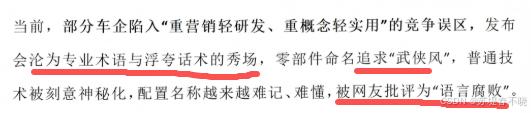
新华视评|汽车行业"浮夸风""巧嘴风"当刹(2025-11-18)
-
分割一切并不够,还要3D重建一切,SAM 3D来了(2025-11-20)
- SAM 3D Objects:支持物体与场景重建
- SAM 3D Body:专注于人体形状与姿态估计
-
Meta「分割一切」进入3D时代!图像分割结果直出3D,有遮挡也能复原(2025-11-20)
- 之前SAM 3就在一般图像分割的基础上增强了语义理解,论文一公布就备受关注。
- 现在又上新SAM 3D。
- SAM 3:https://ai.meta.com/sam3
- SAM 3D:https://ai.meta.com/sam3d
-
SAM3开源,从DINOv3到SAM3,一个模型统一检测、分割与跟踪!(附论文及源码)(2025-11-22)
- 它统一了以往需要多个模型才能完成的检测(找出来)、分割(抠出来)、追踪(在视频里跟住)三大任务,并且支持文本、图片、点、框等各种提示方式。
-
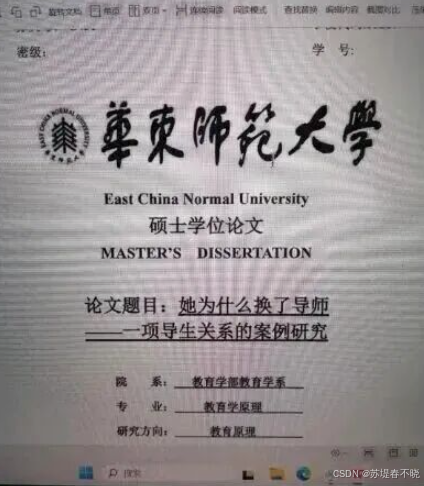
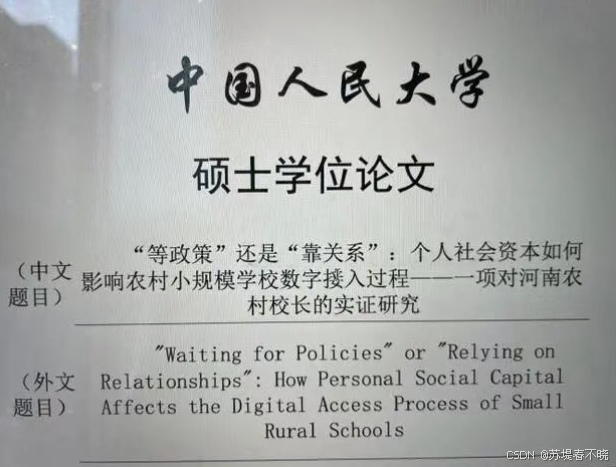
出圈!硕士论文一夜被下载两万次,不少人读了之后表示破防!(2025-11-23)
-
考研人数大跳水!2025年直线下跌50万后,2026再次下跌45万!(2025-11-25)
-
小米汽车智驾团队成员超1800人,四位核心成员曝光(2025-11-26)
- 小米汽车重点介绍了智驾团队的四位核心成员:叶航军、陈光、陈龙和王乃岩。
-
具身智能一定要像人吗?(2025-11-26)
- 其实对于具身智能来说,身体本身就能做一部分"计算",这也是具身智能领域常说的"形态学计算"
- 人类和动物的行为逻辑并不是先把世界看清楚再决定做什么,而是在不断试探中感知世界。
- 回到一开始的问题,具身智能一定要像人吗?可以肯定地回答:不一定。具身智能的形态应由任务和使用场景决定,而不是由对"像人"的偏好主导。很多情况下,非人形的设计会更节能、更可靠、更易落地 。当然,当交互和社会接受度成为关键因素时,有选择地做一些拟人化的特征(比如更容易理解的面部显示或语音交互)是有价值的,但那不等于要做一个全功能的拟人机体。
-
智能水果采摘机器人视觉感知技术综述(2025-11-26)
- 例如,通过振动树枝采摘苹果、通过振动采摘樱桃以及用于工业用途的批量葡萄采摘

- **"手眼分离"**指相机安装在机械臂的固定位置,通常位于机器人的基座、工作台或其他不随机械臂运动而改变的位置。这种方法可提供稳定的视觉信息,但可能因遮挡而无法检测到所有水果。
- **手眼一体"**是指相机直接安装在机械臂末端,机械臂的每次运动都会直接影响相机的视野。其缺点包括计算负载更大,且相机因意外碰撞而损坏的风险更高。
- 目标检测首先必须精准定位水果位置、评估成熟度、判断遮挡情况并识别可采摘点,通过分析水果的聚集情况来确定采摘顺序,再由机械臂执行,从而提高采摘效率和精度
- 直接采摘果实 本身和采摘果柄。这两种方式的末端操作方法不同,数据标注方法也存在显著差异。
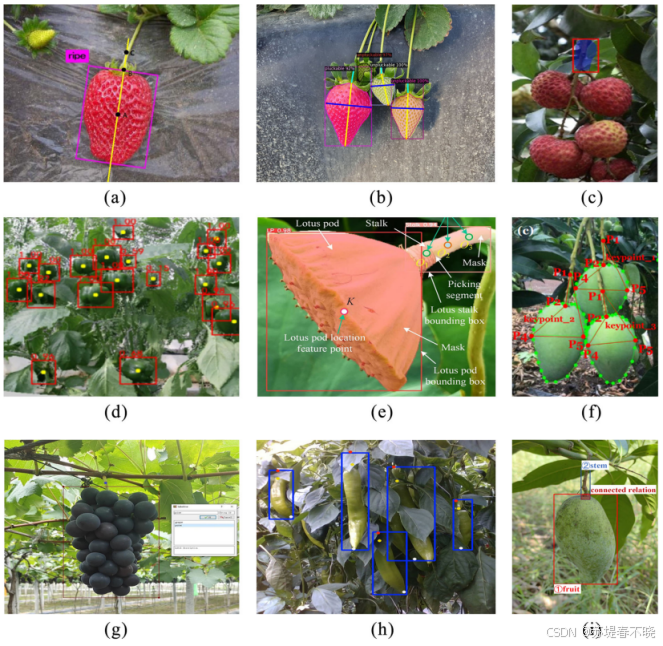
- 水果采摘工作的关键挑战之一始终是如何最小化水果采摘点的位置误差。
- 视觉感知与导航:V-SLAM
- 移动机器人路径规划
- 视点规划作为一项重要技术手段,旨在通过选择最适宜的角度,最大化水果的可见性和识别率,从而最小化外部因素对识别效果的影响。基于几何的视点规划、基于信息的视点规划、基于优化的视点规划和基于学习的视点规划。
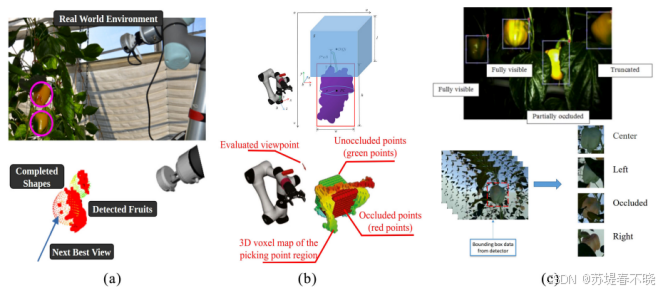
- 基于学习的视点规划方法,使其能够根据输入的环境信息或任务要求生成合理的视点选择策略
- 主动视觉技术:

-
体检查出这6种病,基本不用治!(2025-11-26)
-
魏建军的智驾独角兽,倒下了(2025-11-27)
- 在成立不到六年后跌落悬崖:账户冻结、拖欠工资、高管出走,再到如今的"原地解散",十几轮新闻在短短一年里密集上演。
- 毫末智行
- 对于魏建军和长城来说,毫末的终结是一次昂贵的试错;对于整个智驾行业来说,这却可能是走向成熟前,必须要经历的一次"阵痛式减法"。
-
为什么 Google 和某度几乎同时成立,发展相差却那么大?(2025-11-28)
- 这根本不是什么大环境的锅,也不是什么人才的锅,纯粹就是掌舵人对自己手里那点"权利"和"钱"的理解不同,导致了基因层面的突变。

- 当你的销售团队发现,只要稍微修改一下规则,把出价权重的优先级调高那么一点点,季度财报就能好看一大截的时候,技术团队的声音就开始弱了。


-
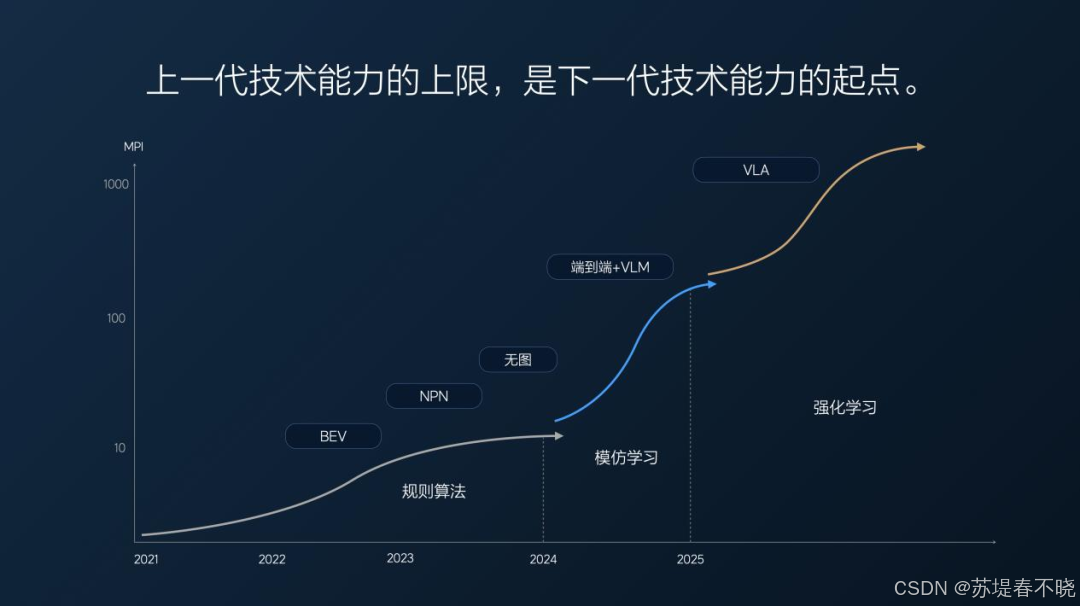
理想披露了一些新的技术信息(2025-11-28)
- Bird's Eye View(鸟瞰图)
- Neural Planning Network(神经网络做规划)
- Imitation Learning,模仿学习,像学徒一样,照着老司机开车,容易学到"坏习惯",没见过的场景会懵
-
不止硅谷十万大裁员!Hinton警告:AI正以最糟糕方式颠覆社会(2025-11-29)
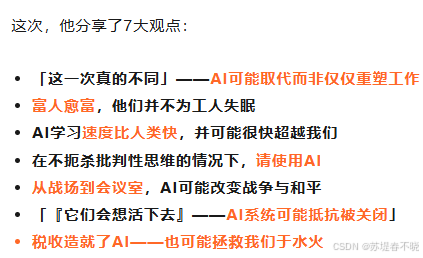
- Sanders发出真诚呼吁:AI不是好或坏的问题,而是谁掌控它、谁受益的问题。
-
自动驾驶系统在遇到事故时是应该起作用还是立刻退出?(2025-11-30)