瘫痪用户在家独立生活12天,Hello Robot如何成为其"左膀右臂"?
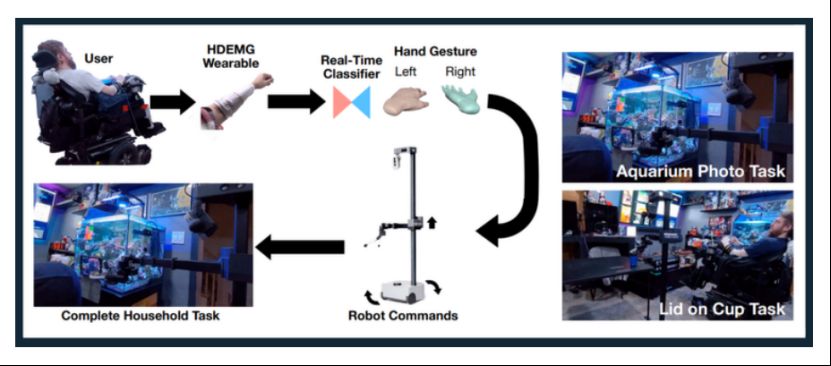
一项由卡耐基梅隆大学(CMU)研究人员主导的、为期12天的家庭研究取得了突破性进展。一位四肢瘫痪的用户,借助一对定制的高密度肌电(HDEMG)传感袖套与一套基于Hello Robot移动操作机器人 Stretch3 构建的机器人系统,首次在无人辅助的情况下,于自己的家中独立完成了多项日常活动。它不仅展示了前沿人机交互技术的巨大潜力,更凸显了其核心硬件平台------Hello Robot在推动具身智能从实验室走向真实家庭场景中的关键作用。
研究的核心:从肌肉信号到自主生活
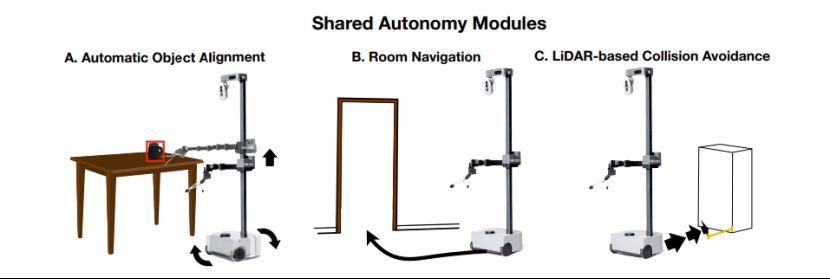
研究的创新之处在于,它并非在受控的实验室,而是在用户真实的家庭环境中进行。用户通过手臂残存的微弱肌电信号,控制一台机器人完成抓取食物、操作物品等复杂任务。这背后是一个集成了计算机视觉、自然语言处理和运动规划的"共享自主性"框架。该框架能理解用户的高层意图(如"我想吃那个"),并将其转化为安全、流畅的机器人动作序列,从而在用户意图与机器人自主性之间建立了无缝桥梁。
而承担所有具体物理操作的,正是一台Stretch3移动操作机器人。在研究中,它可靠地执行了移动、伸展、抓取等一系列精细操作,证明了其作为家庭环境下"通用操作执行器"的能力。

技术底座: Hello Robot具身智能平台 的开放与可靠
此项研究的成功,得益于Hello Robot具身智能平台作为标准化科研基础设施的重要价值:
-
面向真实环境 :Stretch3采用轻量化紧凑型设计,具备接触检测功能,可安全地在复杂家庭环境中运行,使研究能在真实场景中直接验证。
-
开放的软件生态与活跃社区:平台完全开源,拥有活跃的学术界与产业界社区,持续共享数据与模型。这种开放性显著降低了研究门槛,让团队能专注于高层算法创新。
-
完善的开发支持:平台提供校准好的URDF模型、ROS 2支持、纯Python SDK及丰富参考演示。研究人员可快速集成自定义模块,高效完成系统开发

平台级优势:超越单一应用的广阔前景
此次 CMU 研究的成功,印证了Hello Robot 移动操作机器人 在非结构化家庭环境中,能够稳定支撑长时程、高复杂度的辅助操作任务。Hello Robot Stretch3在医疗康复领域的应用潜力已得到实证,未来结合神经接口技术的持续迭代,有望为残障人士、老年人等群体提供更便捷的自主生活解决方案。
同时,作为Hello Robot机器人已被全球众多科研团队采用,相关研究成果频繁亮相 ICRA、NeurIPS 等顶级学术会议。开放的工具链与社区支持,让开发者可快速定制化开发,拓展至老年陪伴、家庭安防、智能家居控制等更多场景,推动具身智能技术从实验室走向规模化应用。
素材来源
研究论文:arXiv:2602.02773(Bimanual High-Density EMG Control for In-Home Mobile Manipulation by a User with Quadriplegia)
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询sales@cnbestec.com