【RC/无人机硬核科普】电调(ESC)全解:分类、参数、接线与避坑指南(CSDN首发)
引言
在RC遥控车、无人机、航模等动力系统中,电调(Electronic Speed Controller,ESC) 是连接电池、电机与控制系统的核心枢纽,堪称动力系统的"智能大脑"。无论是入门级遥控车的有刷电机,还是穿越机的无刷电机,电调的选型、接线、参数设置都直接决定设备的运行稳定性与使用寿命。
很多新手常因混淆电调分类、不懂安数匹配、接错线导致设备烧毁,本文将结合实操场景,从电调分类、核心参数、接线方法、参数设置到炸机/烧车原因,做全维度深度科普,适合RC玩家、航模爱好者及嵌入式硬件开发者参考。
一、电调分类
电调的分类维度主要基于驱动电机类型、结构形式、控制方式,不同分类适配不同应用场景,具体如下:
1.1 按驱动电机类型分类(核心分类)
(1)有刷电调
- 原理:通过控制MOS管的通断,直接调节有刷电机的电枢电压,实现转速控制,结构简单、成本低。
- 特点:调速精度低、效率一般、有机械换向磨损,噪音较大。
- 适用场景:入门级RC玩具车、小型有刷无人机、教学实验平台(如STM32驱动有刷电机实训)。
(2)无刷电调
- 原理 :基于三相PWM逆变技术,通过换相控制无刷电机的定子绕组磁场,驱动转子旋转;分有感无刷电调 (带霍尔传感器)和无感无刷电调(无传感器,靠反电动势检测)。
- 特点:调速精度高、效率高、无机械磨损、寿命长,支持大电流输出。
- 适用场景:主流穿越机、航拍无人机、高性能RC车/船、工业级移动机器人(如嵌入式开发中的STM32驱动无刷电机项目)。
1.2 按结构形式分类
(1)分体电调
- 结构:单个电调对应单个电机,独立安装、独立散热。
- 优势:散热好、维修方便,故障时仅单个电机失效,不影响整机。
- 适用:大型航拍无人机、植保机、大尺寸RC车。
(2)四合一电调
- 结构:将4个电调集成在一块电路板上,适配四旋翼无人机的4个电机,体积紧凑、布线整洁。
- 优势:节省空间、降低接线复杂度,是穿越机的主流选择。
- 注意:散热压力大,需做好风道设计。
1.3 按电压适配能力分类
根据支持的电池串联数(S数),可分为2S-3S电调、3S-6S电调、8S及以上高压电调,S数越高,适配电池电压越高,动力越强(后续参数章节会详细讲解S数匹配)。
二、电调相关知识点介绍
2.1 电调的安数(A)的意义
电调的安数(A) 是指持续额定输出电流,代表电调能长期稳定工作的最大电流值,是电调选型的核心指标。
- 核心逻辑:电调安数必须大于电机最大工作电流,且预留20%-30%余量,否则会因过流发热烧毁MOS管、电容等核心元件。
- 举例:某4S电池驱动的无刷电机,最大工作电流为25A,需选择≥30A的电调(25A×1.2=30A),若选20A电调,满油门运行时会迅速过热烧毁。
2.2 如何匹配电调安培数(电机、电池、电调三角关系)
电调安数匹配需遵循"先定电机,再配电调,最后匹配电池"的逻辑,具体步骤如下:
2.2.1 首先根据车型/设备选择电机
电机的KV值 (转速/伏特)、额定功率 、最大电流是选型基础:
- KV值越高,电机转速越快,电流需求越大;
- 大功率电机(如RC车的4274电机)需搭配大电流电调。
实操建议:根据设备定位选电机,入门选低KV小功率电机,高性能选高KV大功率电机。
2.2.2 然后匹配电调安培数
通过电机最大电流计算电调安数,公式如下:
I电调≥1.2×I电机最大I_{电调} \geq 1.2 \times I_{电机最大}I电调≥1.2×I电机最大
- 若设备需长期满负荷运行(如竞速穿越机),可放大至1.5倍余量;
- 参考值:入门RC车选30A-40A电调,高性能穿越机选50A-80A电调,工业级无人机选100A以上电调。
2.2.3 电池和电调的匹配
电池的S数 (串联数)决定输入电压,电调需支持对应S数,严禁超S数使用(如4S电调接6S电池,会直接击穿MOS管)。
- 1S电池:3.7V,适配小型设备;
- 2S电池:7.4V,适配入门小车;
- 3S电池:11.1V,主流航拍无人机;
- 4S/6S电池:14.8V/22.2V,高性能穿越机、大尺寸RC车。
2.3 电调、电池和动力的关系
三者构成动力系统的"铁三角",相互制约、相互支撑:
| 组件 | 核心作用 | 与电调的关联 |
|---|---|---|
| 电池 | 提供能量,决定电压与放电能力 | 电调的输入电源,需匹配电调S数与放电倍率(C数) |
| 电机 | 输出动力,决定电流需求 | 电调的负载,电调安数需覆盖电机最大电流 |
| 电调 | 精准控流,实现转速调节 | 连接电池与电机,调节电流大小匹配电机需求 |
核心结论:电池决定动力上限,电机决定能耗需求,电调是"桥梁",需同时匹配电池电压与电机电流。
2.4 电调的BEC输出
2.4.1 BEC的定义与核心作用
BEC(Battery Eliminator Circuit,电池消除电路)是集成于电调的降压稳压模块 ,核心作用是将动力电池的高压(如11.1V、22.2V)转换为5V/6V低压,为接收机、飞控、舵机、图传等低压设备供电,省去单独为控制设备配电池的麻烦,因此得名"电池消除电路"。
2.4.2 BEC的两种类型
| 类型 | 线性BEC | 开关BEC(主流) |
|---|---|---|
| 原理 | 利用电阻分压原理降压,多余电压以热量形式消耗 | 采用DC-DC开关技术,高频通断+电感滤波降压 |
| 效率 | 低(50%-70%),发热大 | 高(85%-95%),发热小 |
| 输出电流 | 小(≤2A),带载能力弱 | 大(3A-10A),适配多设备 |
| 噪音 | 极低,输出平稳 | 轻微高频纹波(优质电调可忽略) |
| 适用 | 入门级玩具电调 | 主流航模/RC电调(如好盈、T-Motor) |
2.4.3 BEC接线关键
- 多电调场景(如四旋翼):仅保留一个电调的BEC供电,断开其他电调BEC红线,避免多电源冲突;
- 接线注意:正负极严禁接反,否则直接烧毁接收机/飞控。
2.5 电调上电容的作用
电调电路板上的电容(主要是电解电容、陶瓷电容)是核心辅助元件,作用如下:
- 滤波稳压:滤除电池输入的电压波动,避免电压尖峰损坏MOS管;
- 储能缓冲:电机高速运转时瞬间大电流需求,电容可快速补充能量,缓解电池放电压力;
- 保护控制芯片:稳定控制芯片的供电电压,避免因电压波动导致程序异常;
- 抗干扰:减少电磁干扰,提升电调控制信号的稳定性。
关键提示:电容的耐压值、容量需匹配电池S数,6S及以上高压电调需选用高耐压电容(如50V、100V)。
三、电调如何接线及接线的功能
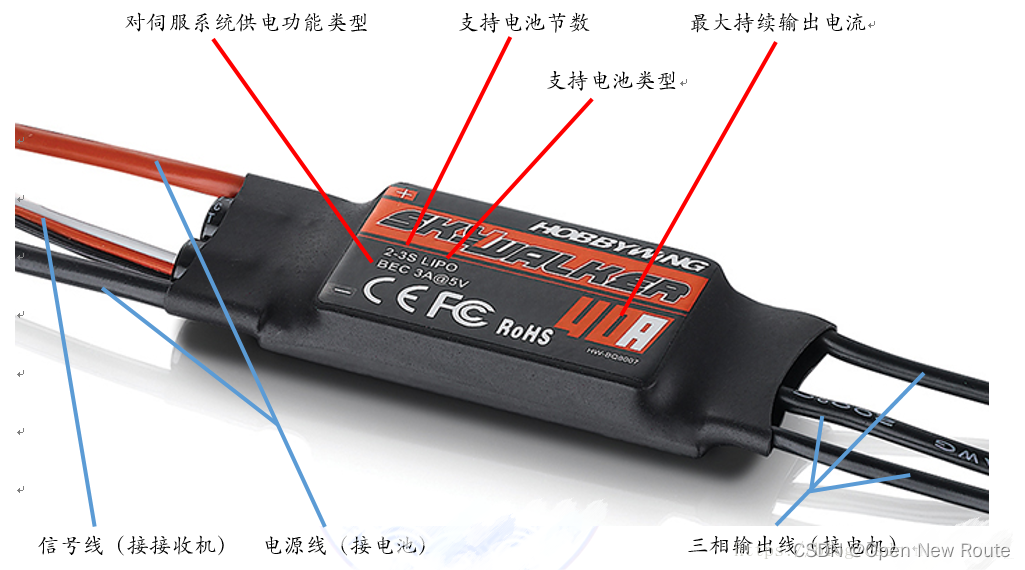
电调接线分为电源输入线、BEC线、电机线、信号控制线,不同设备(RC车/无人机)接线逻辑略有差异,以下分模块详解:
3.1 电调电源线
- 作用:连接动力电池,为电调与电机提供高压动力输入;
- 接口:常见XT60、XT30、香蕉插头,需根据电池电流选择(大电流选XT60);
- 接线要点:正负极(红正黑负)严禁接反,接反会烧毁电调;接线需拧紧,避免虚接发热。
3.2 电调BEC线
- 作用:输出5V/6V低压,为接收机、飞控等控制设备供电;
- 形态:多为3Pin杜邦线(正、负、信号)或单独电源线,部分电调BEC线与信号线集成;
- 接线要点:仅接一个电调的BEC线到接收机/飞控供电口,其余电调BEC线断开(多电调场景)。
3.3 电调BEC线如何连接接收机
- 找到接收机的BEC供电接口(通常标注"5V""BEC");
- 将电调BEC线的红(正)、黑(负)、信号(可选)接入对应接口;
- 若接收机支持自动识别电压,无需额外设置;若为可调BEC,需在电调设置中调整输出电压(5V/6V)。
3.4 电调备用接口
部分电调(如好盈、BLHeli系列)预留编程接口、温度传感器接口、电流检测接口:
- 编程接口:连接电脑,通过配套软件(如BLHeli Suite)刷写固件、调整参数;
- 温度/电流接口:外接传感器,实时监测电调温度、输出电流,实现过温/过流保护;
- 备用信号口:拓展控制功能,如倒车提示、灯光控制等。
四、电调参数设置和调整
电调参数设置直接影响设备运行的平顺性、安全性,以下为核心设置步骤:
4.1 如何设置油门中位(校准油门行程)
油门中位校准是让电调识别遥控器的"中立位""最大油门""最小油门",避免油门不归零导致电机误启动,步骤如下(以RC车/通用电调为例):
- 关闭遥控器与电调电源,将遥控器油门推至最大位置;
- 接通电调电源,等待电调发出"滴"声提示(进入校准模式);
- 将遥控器油门拉至最小位置,电调再次发出提示音,校准完成;
- 打开遥控器电源,测试油门是否平顺,若出现"油门反向",在电调设置中反转信号。
无人机/穿越机:通过飞控地面站(如QGroundControl、Betaflight)校准电调油门行程,选择对应电调协议(PWM/DShot)。
4.2 如何调整电调参数
主流电调(如BLHeli、好盈)支持通过编程卡、电脑软件、遥控器调整参数,核心参数及设置建议如下:
| 参数项 | 作用 | 设置建议 |
|---|---|---|
| 启动模式 | 控制电机启动平顺性 | 入门选"柔和启动",竞速选"暴力启动" |
| 刹车力度 | 电机断电后的制动效果 | 0%-100%可调,竞速可设为0,街跑设为30%-50% |
| BEC输出电压 | 控制低压供电电压 | 接收机/飞控用5V,舵机用6V |
| 过流保护阈值 | 电调过流时的保护电流 | 匹配电机最大电流,避免误触发 |
| 换向频率 | 控制电机调速精度 | 穿越机设为48kHz-96kHz,RC车设为16kHz-32kHz |
| 低压保护阈值 | 电池欠压保护电压 | 3S电池设为9.0V,4S设为12.0V,避免过放损坏电池 |
实操工具:
- 嵌入式开发者可通过电调编程口连接STM32/Arduino,实现参数自动化配置;
- 普通玩家可使用电调编程卡或BLHeli Suite软件可视化调整。
五、烧电调的原因
电调烧毁是RC/航模玩家最常见的故障,核心原因均为参数不匹配、接线错误、工况异常,具体拆解如下:
1. 堵转(卡滞)
- 现象:电机被异物卡滞、转子卡死,电调持续输出大电流却无法转动,瞬间发热烧毁;
- 场景:RC车陷入泥地、无人机桨叶缠线、电机轴承损坏;
- 预防:定期检查电机/桨叶,避免卡滞;开启电调"堵转保护"功能。
2. 电调安培小于电机标称电流
- 原因:电调安数未预留余量,电机满负荷运行时电流超过电调上限;
- 案例:电机标称最大电流30A,选用20A电调,满油门运行1分钟即烧毁;
- 预防:严格遵循"电调安数≥1.2×电机最大电流"原则。
3. 用了超过标称电压的电池
- 原因:超S数电池接入电调,击穿MOS管等耐压元件;
- 案例:3S电调接4S电池,瞬间烧毁;
- 预防:核对电调支持的S数,严禁超压使用;部分电调支持自动识别电压,需开启对应功能。
4. 高温天玩车/飞行
- 原因:环境温度高+电调自身发热,散热不良导致元件老化加速,最终击穿;
- 场景:夏季户外长时间满油门运行、电调无散热措施;
- 预防:给电调加装散热片、选择通风良好的安装位置;高温环境减少满负荷运行时间。
5. 接线错误(核心高频原因)
- 电源线正负极接反:直接烧毁电调控制芯片;
- 电机线接错相序:电机无法启动,电调过流保护失效;
- BEC线接反:烧毁接收机/飞控;
- 预防:接线前反复核对正负极,使用万用表测试;新手可先断电测试,再上电运行。
总结
电调作为动力系统的核心,其选型、接线、参数设置的核心逻辑可归纳为:电压匹配S数,电流匹配安数,接线杜绝反接,工况避免异常。无论是嵌入式开发中的STM32电调驱动项目,还是RC玩家的实操调试,掌握这些核心知识点,能大幅降低设备故障概率。