文章目录
- [1.TF 变换系统概述](#1.TF 变换系统概述)
-
- [1.1 为什么需要TF?](#1.1 为什么需要TF?)
- [1.2 TF 的发展历史](#1.2 TF 的发展历史)
- [1.3 TF 系统的核心功能](#1.3 TF 系统的核心功能)
- 2.坐标系与变换的数学基础
-
- [2.1 坐标系的定义](#2.1 坐标系的定义)
- [2.2 平移变换](#2.2 平移变换)
- [2.3 旋转变换](#2.3 旋转变换)
-
- [2.3.1 旋转矩阵](#2.3.1 旋转矩阵)
- [2.3.2 欧拉角](#2.3.2 欧拉角)
- [2.3.3 四元数(Quaternion)](#2.3.3 四元数(Quaternion))
- [2.3.4 欧拉角与四元数相互转换](#2.3.4 欧拉角与四元数相互转换)
-
- [2.3.4.1 欧拉角与四元数相互转换(ROS C++)](#2.3.4.1 欧拉角与四元数相互转换(ROS C++))
- [2.4 齐次变换矩阵](#2.4 齐次变换矩阵)
- [2.5 ROS中的变换消息格式](#2.5 ROS中的变换消息格式)
- [3.ROS TF 体系架构](#3.ROS TF 体系架构)
-
- [3.1 TF树(Transform Tree)](#3.1 TF树(Transform Tree))
- [3.2 TF 话题(Topics)](#3.2 TF 话题(Topics))
- [3.3 TF 时间缓冲(Buffer)](#3.3 TF 时间缓冲(Buffer))
- [3.4 广播者与监听者](#3.4 广播者与监听者)
- 4.标准机器人坐标系约定
-
- [4.1 REP-105:移动平台坐标系标准](#4.1 REP-105:移动平台坐标系标准)
-
- [4.1.1 `map` --- 全局地图坐标系](#4.1.1
map— 全局地图坐标系) - [4.1.2 `odom` --- 里程计坐标系](#4.1.2
odom— 里程计坐标系) - [4.1.3 `base_link` --- 机器人底盘坐标系](#4.1.3
base_link— 机器人底盘坐标系) - [4.1.4 典型完整变换链:](#4.1.4 典型完整变换链:)
- [4.1.1 `map` --- 全局地图坐标系](#4.1.1
- [4.2 REP-103:坐标系轴向约定](#4.2 REP-103:坐标系轴向约定)
- [5.ROS1 TF 实践:命令与编程](#5.ROS1 TF 实践:命令与编程)
-
- [5.1 命令行工具](#5.1 命令行工具)
-
- [5.1.1 查看TF树(view_frames)](#5.1.1 查看TF树(view_frames))
- [5.1.2 实时监听变换(tf_echo)](#5.1.2 实时监听变换(tf_echo))
- [5.1.3 静态变换发布(static_transform_publisher)](#5.1.3 静态变换发布(static_transform_publisher))
- [5.1.4 TF监控(tf_monitor)](#5.1.4 TF监控(tf_monitor))
- [5.2 在 Launch文件中发布静态TF](#5.2 在 Launch文件中发布静态TF)
- [5.3 C++ 编程:发布TF变换](#5.3 C++ 编程:发布TF变换)
-
- [5.3.1 广播静态变换](#5.3.1 广播静态变换)
- [5.3.2 广播动态变换](#5.3.2 广播动态变换)
- [5.4 C++ 编程:监听TF变换](#5.4 C++ 编程:监听TF变换)
- [5.5 Python 编程(ROS1)](#5.5 Python 编程(ROS1))
-
- [5.5.1 Python发布静态变换](#5.5.1 Python发布静态变换)
- [5.5.2 Python监听变换](#5.5.2 Python监听变换)
- [5.6 欧拉角与四元数转换(ROS1)](#5.6 欧拉角与四元数转换(ROS1))
- [6.ROS2 TF2实践:命令与编程](#6.ROS2 TF2实践:命令与编程)
-
- [6.1 命令行工具](#6.1 命令行工具)
-
- [6.1.1 查看TF树](#6.1.1 查看TF树)
- [6.1.2 实时监听变换](#6.1.2 实时监听变换)
- [6.1.3 命令行发布静态变换](#6.1.3 命令行发布静态变换)
- [6.1.4 查看 TF 话题](#6.1.4 查看 TF 话题)
- [6.2 C++ 编程(ROS2)](#6.2 C++ 编程(ROS2))
-
- [6.2.1 发布静态变换](#6.2.1 发布静态变换)
- [6.2.2 发布动态变换(从里程计)](#6.2.2 发布动态变换(从里程计))
- [6.2.3 监听变换(ROS2 C++)](#6.2.3 监听变换(ROS2 C++))
- [6.3 Python 编程(ROS2)](#6.3 Python 编程(ROS2))
-
- [6.3.1 Python发布静态变换](#6.3.1 Python发布静态变换)
- [6.3.2 Python发布动态变换(定时器驱动)](#6.3.2 Python发布动态变换(定时器驱动))
- [6.3.3 Python监听变换(ROS2)](#6.3.3 Python监听变换(ROS2))
- [6.4 ROS2 Launch文件中发布静态TF](#6.4 ROS2 Launch文件中发布静态TF)
- 7.静态变换vs动态变换
-
- [7.1 核心区别](#7.1 核心区别)
- [7.2 静态变换的特殊性](#7.2 静态变换的特殊性)
- [7.3 何时使用静态变换](#7.3 何时使用静态变换)
- [8.URDF与robot_state_publisher 自动发布TF](#8.URDF与robot_state_publisher 自动发布TF)
-
- [8.1 URDF中的TF关系](#8.1 URDF中的TF关系)
-
- [8.1.1 典型的简单机器人URDF示例:](#8.1.1 典型的简单机器人URDF示例:)
- [8.2 robot_state_publisher启动配置](#8.2 robot_state_publisher启动配置)
- 8.3TF发布流程
- [9.相机 TF 发布详解](#9.相机 TF 发布详解)
-
- [9.1 两种相机坐标系](#9.1 两种相机坐标系)
-
- [9.1.1 ROS 相机坐标系(camera_link)](#9.1.1 ROS 相机坐标系(camera_link))
- [9.1.2 光学相机坐标系(camera_optical_frame)](#9.1.2 光学相机坐标系(camera_optical_frame))
- [9.1.3 两种坐标系之间的旋转关系](#9.1.3 两种坐标系之间的旋转关系)
- [9.2 常见相机坐标系命名规范](#9.2 常见相机坐标系命名规范)
- [9.3 Intel RealSense相机TF结构](#9.3 Intel RealSense相机TF结构)
- [9.4 手动为相机发布TF(完整节点)](#9.4 手动为相机发布TF(完整节点))
- [9.5 URDF中定义相机TF](#9.5 URDF中定义相机TF)
- [9.6 深度相机点云坐标系变换](#9.6 深度相机点云坐标系变换)
- 10.调试与可视化工具
-
- [10.1 view_frames:TF树可视化](#10.1 view_frames:TF树可视化)
- [10.2 tf2_echo:实时变换监控](#10.2 tf2_echo:实时变换监控)
- [10.3 rqt_tf_tree:图形化TF树](#10.3 rqt_tf_tree:图形化TF树)
- [10.4 Rviz/Rviz2:3D可视化](#10.4 Rviz/Rviz2:3D可视化)
- [10.5 命令行快速排查](#10.5 命令行快速排查)
- [11.ROS1→ ROS2 TF迁移指南](#11.ROS1→ ROS2 TF迁移指南)
-
- [11.1 API对比](#11.1 API对比)
- [11.2 命令行工具对比](#11.2 命令行工具对比)
- [11.3 静态变换参数顺序变化](#11.3 静态变换参数顺序变化)
- [11.4 Python API迁移](#11.4 Python API迁移)
- 12.常见问题与解决方案
-
- 12.1 "Could not find a connection between 'X' and 'Y'"
- 12.2 "Extrapolation into the future"
- 12.3 "Extrapolation into the past"
- [12.4 TF 树形成循环(Loop Detected)](#12.4 TF 树形成循环(Loop Detected))
- [12.5 TF 发布频率过低导致抖动](#12.5 TF 发布频率过低导致抖动)
- [12.6 时间戳不一致(Time Stamp Mismatch)](#12.6 时间戳不一致(Time Stamp Mismatch))
- [12.7 静态TF在Rviz中不显示](#12.7 静态TF在Rviz中不显示)
- 13.综合实战:多传感器TF构建
-
- [13.1 场景描述](#13.1 场景描述)
- [13.2 完整的URDF描述](#13.2 完整的URDF描述)
- [13.3 完整的Launch文件](#13.3 完整的Launch文件)
- [13.4 最终TF树结构](#13.4 最终TF树结构)
- [13.5 验证TF树正确性](#13.5 验证TF树正确性)
- [14.常用 TF 命令速查表](#14.常用 TF 命令速查表)
-
- [14.1 ROS1命令](#14.1 ROS1命令)
- [14.2 ROS2命令](#14.2 ROS2命令)
- [14.3 常用坐标系名称参考](#14.3 常用坐标系名称参考)
- [14.4 包依赖速查(CMakeLists.txt)](#14.4 包依赖速查(CMakeLists.txt))
1.TF 变换系统概述
1.1 为什么需要TF?
在机器人系统中,机器人身上往往安装了多种传感器:激光雷达、RGB-D 相机、IMU、超声波、GPS 等等。每种传感器都有自己的"参考坐标系"------激光雷达测到的障碍物坐标是相对于激光雷达本身的,相机拍到的目标也是相对于相机镜头中心的。
然而,我们真正关心的往往是:这个障碍物或目标相对于机器人底盘 在哪里?或者相对于世界地图在哪里?
这就是 TF(Transform Framework)要解决的核心问题:在机器人系统中,统一管理所有坐标系之间的空间变换关系,使任意一个点的坐标能够在不同坐标系之间自由转换。
典型场景示例:
─────────────────────────────────────────────────────
传感器输入:激光雷达检测到障碍物位于 (1.5m, 0.3m, 0m)
→ 这是相对于 laser_link 坐标系的坐标
机器人需要:障碍物在 base_link(底盘)坐标系的位置?
障碍物在 map(地图)坐标系的绝对位置?
TF 变换链:laser_link → base_link → odom → map
─────────────────────────────────────────────────────1.2 TF 的发展历史
| 版本 | 时期 | 特点 |
|---|---|---|
| tf | ROS Groovy 以前 | 第一代实现,功能基础,有性能瓶颈 |
| tf2 | ROS Groovy 起 | 重构版,性能更高,同时支持 ROS1/ROS2,推荐使用 |
| tf2 in ROS2 | ROS2 所有版本 | 原生支持,完全兼容 tf2 API |
重要提示:tf(第一代)在 ROS Kinetic 之后已被官方标记为 deprecated(弃用),在 ROS1中也应使用tf2,在 ROS2中只有tf2。
1.3 TF 系统的核心功能
- 维护坐标系树:以树形结构存储所有坐标系之间的变换关系
- 时间序列缓存 :按时间戳缓存最近一段时间的变换数据(默认 10 秒)
- 任意两坐标系查询:给定变换树,自动计算任意两个坐标系之间的变换
- 时间插值:在有时间戳的变换之间进行插值,处理传感器时间同步
- 点/姿态变换:将具体的点坐标或位姿从一个坐标系变换到另一个坐标系
2.坐标系与变换的数学基础
理解TF,需要先掌握坐标变换的数学基础。
2.1 坐标系的定义
一个三维坐标系由原点位置 和三个正交轴方向 确定。在 ROS 中,所有坐标系遵循右手定则 :
cpp
右手坐标系:
- 伸出右手,食指从X轴弯向Y轴
- 大拇指所指方向即为Z轴正方向
ROS 标准轴向约定(ENU - East/North/Up):
- X 轴:向前(Forward)
- Y 轴:向左(Left)
- Z 轴:向上(Up)2.2 平移变换
从坐标系 A 到坐标系 B,如果 B 的原点在 A 中的位置为 (tx, ty, tz) ,则 A 中的点 (x_A, y_A, z_A) 在 B 中的坐标为:
[x_B] [x_A - tx]
[y_B] = [y_A - ty]
[z_B] [z_A - tz]2.3 旋转变换
旋转用旋转矩阵 R 或四元数 q 表示。
2.3.1 旋转矩阵
3×3正交矩阵,行列式为 1:
cpp
[r11 r12 r13]
R = [r21 r22 r23]
[r31 r32 r33]绕Z轴旋转θ角的旋转矩阵(偏航角/Yaw):
cpp
[cos(θ) -sin(θ) 0]
Rz = [sin(θ) cos(θ) 0]
[ 0 0 1]2.3.2 欧拉角
用三个角度描述旋转:
- Roll(横滚角):绕 X 轴旋转
- Pitch(俯仰角):绕 Y 轴旋转
- Yaw(偏航角):绕 Z 轴旋转
⚠️ 欧拉角的缺陷:存在"万向节死锁"问题(Gimbal Lock),当 Pitch = ±90° 时,Roll和Yaw会重合,丢失一个自由度。因此在ROS中,姿态通常用四元数传输,只在用户接口处转换为欧拉角。
2.3.3 四元数(Quaternion)
四元数是ROS中表示旋转最常用的方式:
cpp
q = w + xi + yj + zk
= (x, y, z, w)
其中:
w = cos(θ/2) --- 实部(标量)
x = ax·sin(θ/2) --- 虚部 i 分量
y = ay·sin(θ/2) --- 虚部 j 分量
z = az·sin(θ/2) --- 虚部 k 分量
(ax, ay, az) 是旋转轴的单位向量,θ 是旋转角度
单位四元数满足:x² + y² + z² + w² = 1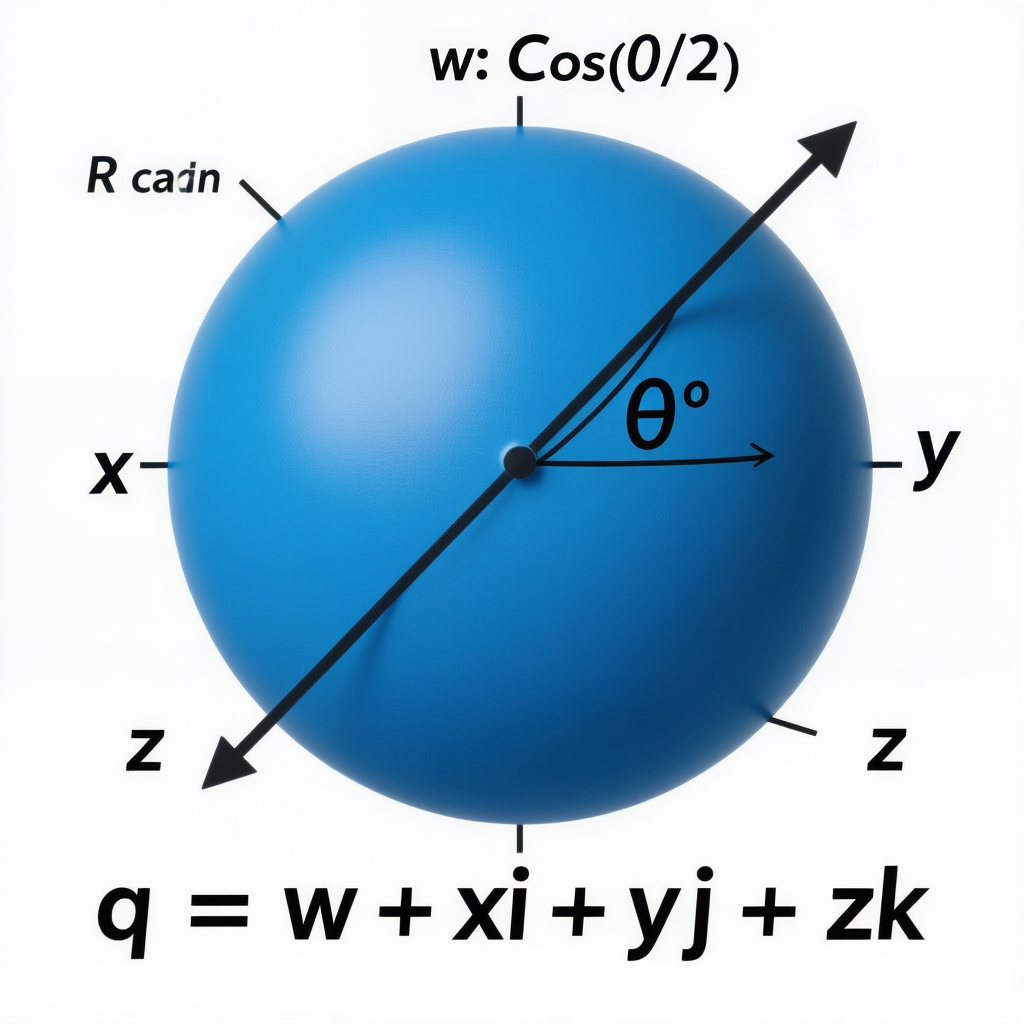
▲ 图:四元数旋转的几何意义------旋转轴与旋转角度θ决定了四元数的四个分量。
无旋转(单位旋转)时 :q = (0, 0, 0, 1),即 w=1,x=y=z=0。
2.3.4 欧拉角与四元数相互转换
cpp
欧拉角 → 四元数(ZYX 顺序):
cy = cos(yaw/2), sy = sin(yaw/2)
cp = cos(pitch/2), sp = sin(pitch/2)
cr = cos(roll/2), sr = sin(roll/2)
q.w = cr*cp*cy + sr*sp*sy
q.x = sr*cp*cy - cr*sp*sy
q.y = cr*sp*cy + sr*cp*sy
q.z = cr*cp*sy - sr*sp*cy2.3.4.1 欧拉角与四元数相互转换(ROS C++)
cpp
#include <tf2/LinearMath/Quaternion.h>
#include <tf2/LinearMath/Matrix3x3.h>
// ===== 欧拉角 → 四元数 =====
double roll = 0.0, pitch = 0.0, yaw = M_PI_2; // 90°
tf2::Quaternion q;
q.setRPY(roll, pitch, yaw);
// 结果:q = (0, 0, 0.707, 0.707)
// ===== 四元数 → 欧拉角 =====
tf2::Matrix3x3 rot_matrix(q);
double r, p, y_out;
rot_matrix.getRPY(r, p, y_out);
// 单位:弧度(需 × 180/π 转换为角度)2.4 齐次变换矩阵
将旋转和平移合并到一个 4×4 矩阵中:
cpp
[R | t] [r11 r12 r13 | tx]
T = [---|--] = [r21 r22 r23 | ty]
[0 | 1] [r31 r32 r33 | tz]
[ 0 0 0 | 1]变换链:如果A→B 的变换是 T_AB,B→C 的变换是T_BC,则 A→C 的变换:
cpp
T_AC = T_AB · T_BC这就是TF系统内部计算变换链时的核心数学操作。
2.5 ROS中的变换消息格式
cpp
geometry_msgs/TransformStamped:
std_msgs/Header header
uint32 seq # ROS1 专有
builtin_interfaces/Time stamp
string frame_id # 父坐标系 ID
string child_frame_id # 子坐标系 ID
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
float64 z
float64 w3.ROS TF 体系架构
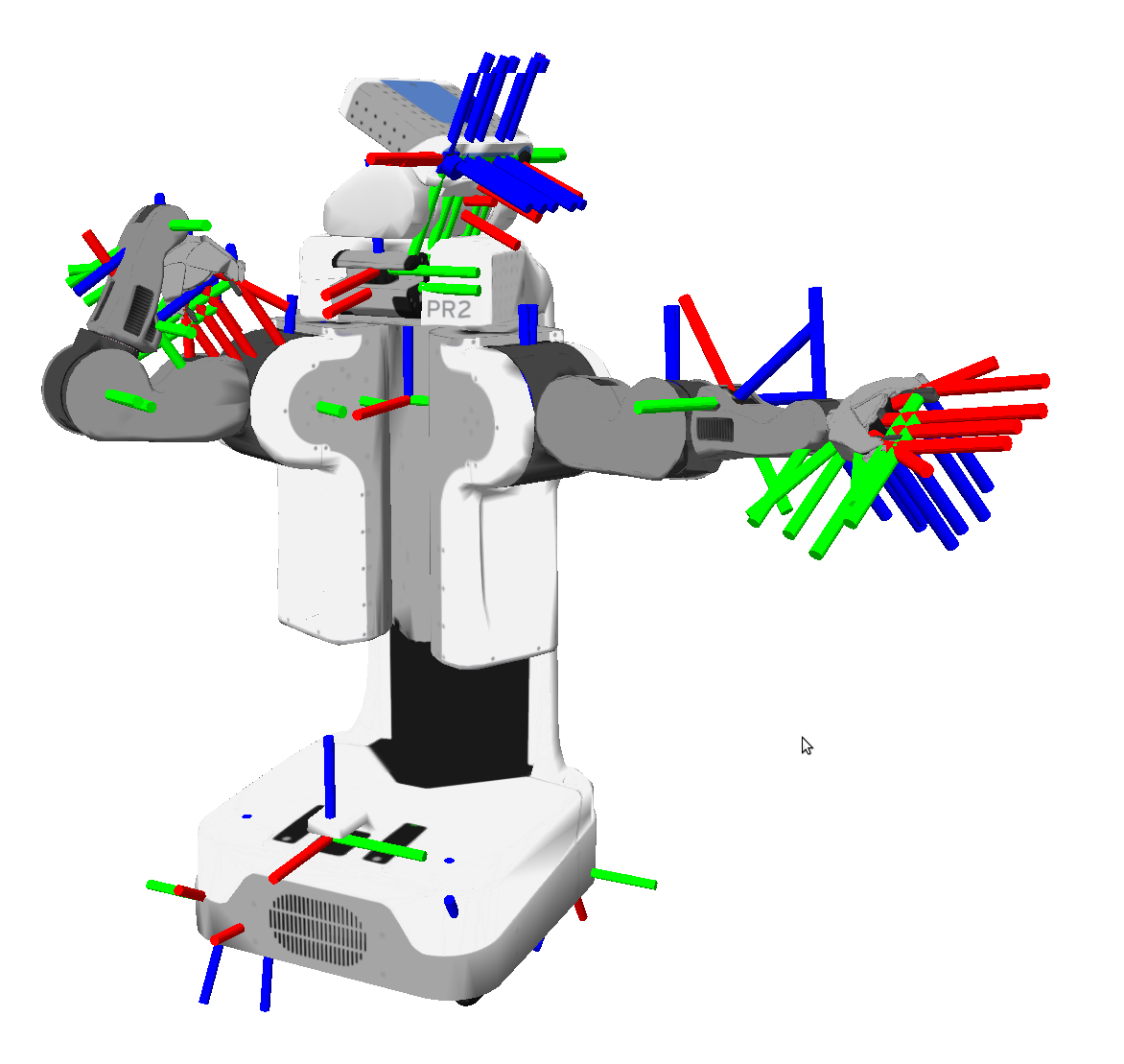
3.1 TF树(Transform Tree)
TF的核心数据结构是一棵有向树(Directed Tree),也称为"坐标系树"。
▲ 图:典型 ROS 机器人 TF 树结构。从根节点 world 到 map、odom、base_link,再到各传感器坐标系。
cpp
world
│
map
│
odom
│
base_link
/ | \
laser_link camera_link imu_link
|
camera_optical_frame关键规则:
- 每个坐标系节点有且只有一个父节点(根节点除外)
- 树不能形成循环(否则变换会矛盾)
- 任意两个节点之间的路径是唯一的
3.2 TF 话题(Topics)
TF数据通过两个ROS话题传播:
| 话题 | 消息类型 | 用途 |
|---|---|---|
/tf |
tf2_msgs/TFMessage |
动态变换(实时发布) |
/tf_static |
tf2_msgs/TFMessage |
静态变换(QoS=TRANSIENT_LOCAL,持久化) |
查看话题内容:
bash
# ROS1
rostopic echo /tf
# ROS2
ros2 topic echo /tf
ros2 topic echo /tf_static3.3 TF 时间缓冲(Buffer)
TF Listener 维护一个时间序列缓冲区,默认保存最近 10 秒的变换历史。这使得查询历史时刻的变换成为可能。
cpp
时间轴:
t=0 t=0.1 t=0.2 ... t=9.8 t=9.9 t=10.0
│ │ │ │ │ │
[T0] [T1] [T2] ... [T98] [T99] [T100] ← 缓冲区内
↑ 超出缓冲范围后被删除当查询时刻t的变换时,如果 t在两个已知变换时间之间,TF会进行线性插值 (平移)和球面线性插值 SLERP(旋转四元数)。
3.4 广播者与监听者
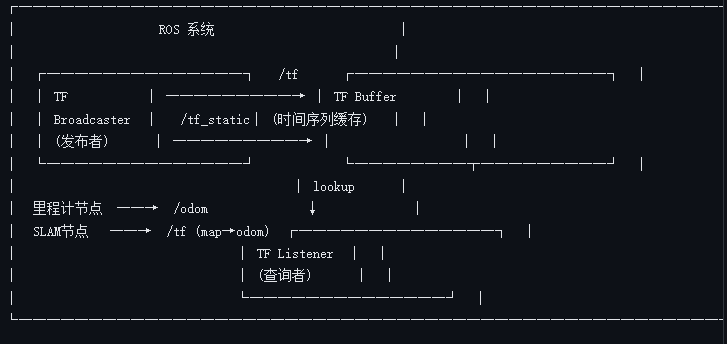
⚠️TF Buffer 默认保存最近
10秒的变换历史,支持时间插值(平移线性插值 + 旋转 SLERP)。
4.标准机器人坐标系约定
4.1 REP-105:移动平台坐标系标准
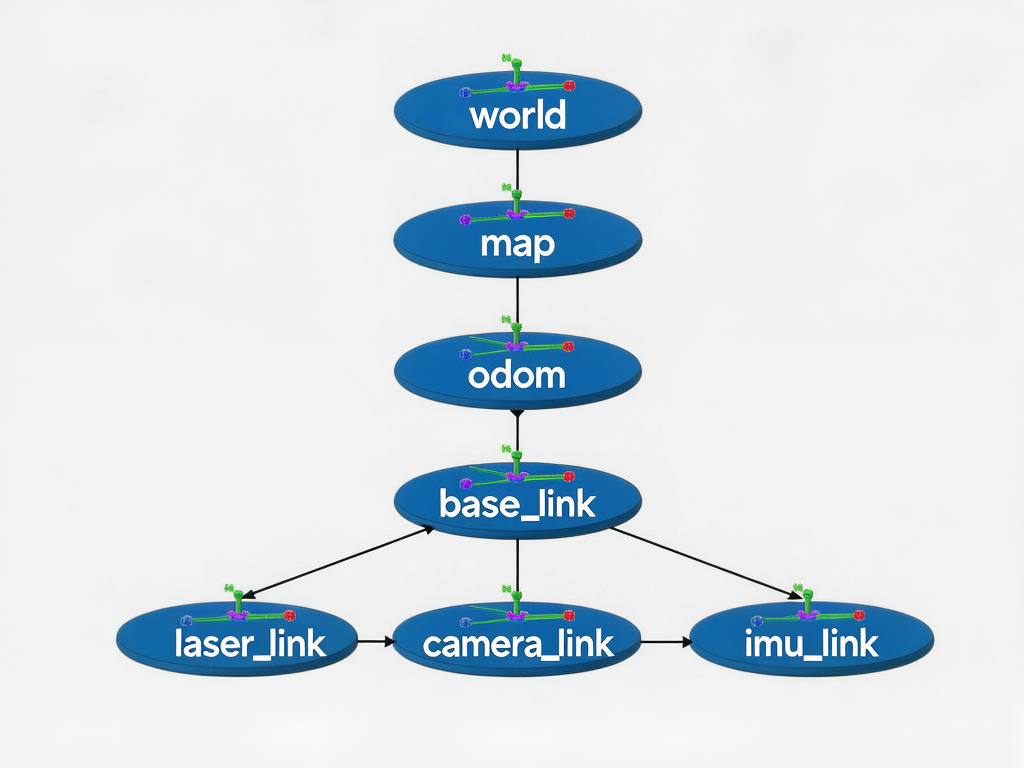
ROS官方通过 REP-105(ROS Enhancement Proposals #105)定义了移动机器人的标准坐标系:
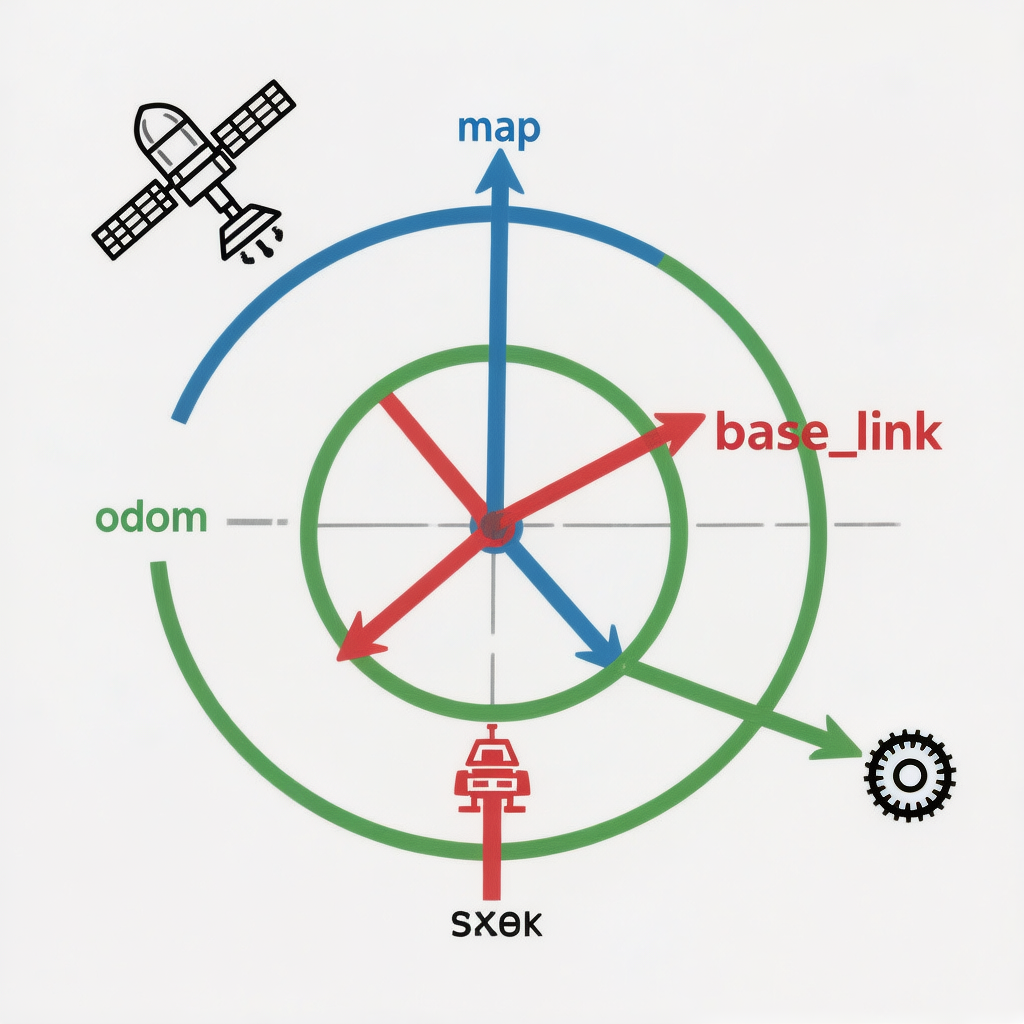
▲ 图:ROS 移动机器人三大核心坐标系。蓝色 map 为全局地图坐标系,绿色 odom 为里程计坐标系,红色 base_link 为机器人底盘坐标系。
| 坐标系 | 发布者 | 特点 |
|---|---|---|
| map --- 全局地图 | SLAM (GMapping, Cartographer 等) | 长期精确,可能突变(重定位时) |
| odom --- 里程计 | 驱动/里程计节点 | 连续平滑,但会漂移 |
| base_link --- 底盘 | 里程计/驱动节点 | 固连在机器人底盘上 |
4.1.1 map --- 全局地图坐标系
- 含义:固定在世界上的绝对坐标系,代表地图原点
- 发布者:SLAM 系统(如 GMapping、Cartographer、SLAM Toolbox)
- 变换 :
map → odom - 特点 :
- 是整个 TF 树的根节点
- 坐标系可能发生突变(当地图被修正/重定位时)
- 长期精确,但非连续
4.1.2 odom --- 里程计坐标系
- 含义:机器人出发点为原点,通过积分里程计数据估算位置
- 发布者:里程计节点(驱动层、轮式编码器、视觉里程计等)
- 变换 :
odom → base_link - 特点 :
- 连续平滑,无突变
- 会随时间累积误差(drift)
- 短期精确,但长期漂移
4.1.3 base_link --- 机器人底盘坐标系
- 含义:固连在机器人底盘上的坐标系,随机器人运动
- 发布者:里程计/驱动节点
- 特点 :
- 通常原点在机器人底盘中心
- 所有传感器坐标系都以此为参考挂载
4.1.4 典型完整变换链:
cpp
map → odom → base_link → base_footprint → sensor_link
↑ ↑ ↑
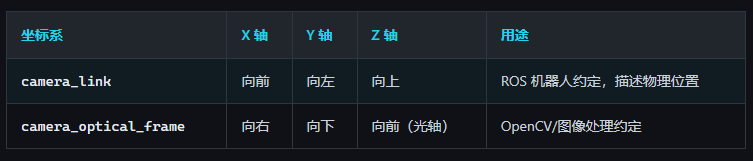
SLAM 里程计 机器人模型(URDF)4.2 REP-103:坐标系轴向约定
| 坐标系类型 | X 轴 | Y 轴 | Z 轴 |
|---|---|---|---|
| 机器人体坐标系 | 向前 | 向左 | 向上 |
| 相机(ROS 风格) | 向前 | 向左 | 向上 |
| 相机(光学风格) | 向右 | 向下 | 向前(视线方向) |
| 地理/NED | 向北 | 向东 | 向下 |
| 地理/ENU | 向东 | 向北 | 向上 |
注意:相机有两种坐标系约定,需要特别注意它们之间的转换(见第九章)
5.ROS1 TF 实践:命令与编程
5.1 命令行工具
5.1.1 查看TF树(view_frames)
bash
# 生成当前 TF 树的 PDF 可视化文件
rosrun tf view_frames
# 生成后查看(在命令运行目录会生成 frames.pdf)
evince frames.pdf
# 或
xdg-open frames.pdf
view_frames会监听5秒钟的/tf数据,然后生成包含整个TF树的PDF文件,非常适合调试。
5.1.2 实时监听变换(tf_echo)
bash
# 格式:rosrun tf tf_echo <source_frame> <target_frame>
# 查看 base_link 相对于 map 的变换(机器人在地图中的位姿)
rosrun tf tf_echo /map /base_link
# 查看激光雷达相对于底盘的变换
rosrun tf tf_echo /base_link /laser
# 输出示例:
# At time 1620000000.123
# - Translation: [1.234, 0.567, 0.000]
# - Rotation: in Quaternion [0.000, 0.000, 0.707, 0.707]
# in RPY (radian) [0.000, -0.000, 1.571]
# in RPY (degree) [0.000, -0.000, 90.000]5.1.3 静态变换发布(static_transform_publisher)
bash
# ROS1 格式(注意参数顺序!):
# x y z yaw pitch roll frame_id child_frame_id period_ms
# 发布 base_link → laser 的静态变换
# 激光雷达在底盘前方 0.2m、上方 0.1m,无旋转
rosrun tf static_transform_publisher 0.2 0 0.1 0 0 0 base_link laser 100
# 或使用四元数版本:
# x y z qx qy qz qw frame_id child_frame_id period_ms
rosrun tf static_transform_publisher 0.2 0 0.1 0 0 0 1 base_link laser 100⚠️1. ROS1 参数顺序陷阱 :
yaw pitch roll(不是 roll pitch yaw!)2.ROS1 参数顺序:x y z yaw pitch roll frame_id child_frame_id period_ms(注意 yaw 在前!)
5.1.4 TF监控(tf_monitor)
bash
# 监控所有 TF 变换的发布频率和延迟
rosrun tf tf_monitor
# 监控特定两个坐标系
rosrun tf tf_monitor /base_link /laser输出示例:
bash
RESULTS: for all Frames
Frames:
Frame: /laser published by unknown_publisher Average Delay: 0.00123 Max Delay: 0.00456
All Broadcasters:
Node: /robot_state_publisher 58.10 Hz, Max Delay: 0.001245.2 在 Launch文件中发布静态TF
xml
<!-- my_robot.launch -->
<launch>
<!-- 方法一:直接在 launch 文件中发布静态变换 -->
<node pkg="tf" type="static_transform_publisher"
name="base_to_laser_broadcaster"
args="0.2 0.0 0.1 0 0 0 base_link laser 100" />
<!-- 方法二(推荐):使用 tf2 的 static_transform_publisher -->
<node pkg="tf2_ros" type="static_transform_publisher"
name="base_to_camera_broadcaster"
args="0.1 0.0 0.2 0 0 0 1 base_link camera_link" />
<!-- 发布多个静态变换 -->
<node pkg="tf2_ros" type="static_transform_publisher"
name="camera_to_optical_broadcaster"
args="0 0 0 -1.5707963 0 -1.5707963 camera_link camera_optical_frame" />
</launch>5.3 C++ 编程:发布TF变换
5.3.1 广播静态变换
cpp
#include <ros/ros.h>
#include <tf2_ros/static_transform_broadcaster.h>
#include <geometry_msgs/TransformStamped.h>
#include <tf2/LinearMath/Quaternion.h>
int main(int argc, char** argv) {
ros::init(argc, argv, "static_tf_broadcaster");
ros::NodeHandle nh;
// 创建静态变换广播器
static tf2_ros::StaticTransformBroadcaster static_broadcaster;
geometry_msgs::TransformStamped static_tf;
// 设置时间戳和坐标系名称
static_tf.header.stamp = ros::Time::now();
static_tf.header.frame_id = "base_link"; // 父坐标系
static_tf.child_frame_id = "laser_link"; // 子坐标系
// 设置平移(单位:米)
static_tf.transform.translation.x = 0.2;
static_tf.transform.translation.y = 0.0;
static_tf.transform.translation.z = 0.1;
// 设置旋转(四元数)
tf2::Quaternion q;
q.setRPY(0, 0, 0); // roll, pitch, yaw(弧度)
static_tf.transform.rotation.x = q.x();
static_tf.transform.rotation.y = q.y();
static_tf.transform.rotation.z = q.z();
static_tf.transform.rotation.w = q.w();
// 发布(只发一次,持续有效)
static_broadcaster.sendTransform(static_tf);
ROS_INFO("Static TF published: base_link -> laser_link");
ros::spin();
return 0;
}5.3.2 广播动态变换
cpp
#include <ros/ros.h>
#include <tf2_ros/transform_broadcaster.h>
#include <geometry_msgs/TransformStamped.h>
#include <tf2/LinearMath/Quaternion.h>
#include <nav_msgs/Odometry.h>
class OdomTFBroadcaster {
public:
OdomTFBroadcaster() : nh_() {
odom_sub_ = nh_.subscribe("odom", 10,
&OdomTFBroadcaster::odomCallback, this);
}
void odomCallback(const nav_msgs::Odometry::ConstPtr& msg) {
geometry_msgs::TransformStamped tf_msg;
// 从里程计消息填充 TF
tf_msg.header.stamp = msg->header.stamp;
tf_msg.header.frame_id = "odom";
tf_msg.child_frame_id = "base_link";
// 平移:从里程计位置获取
tf_msg.transform.translation.x = msg->pose.pose.position.x;
tf_msg.transform.translation.y = msg->pose.pose.position.y;
tf_msg.transform.translation.z = msg->pose.pose.position.z;
// 旋转:直接使用里程计的四元数
tf_msg.transform.rotation = msg->pose.pose.orientation;
// 发布变换
br_.sendTransform(tf_msg);
}
private:
ros::NodeHandle nh_;
ros::Subscriber odom_sub_;
tf2_ros::TransformBroadcaster br_;
};
int main(int argc, char** argv) {
ros::init(argc, argv, "odom_tf_broadcaster");
OdomTFBroadcaster broadcaster;
ros::spin();
return 0;
}5.4 C++ 编程:监听TF变换
cpp
#include <ros/ros.h>
#include <tf2_ros/transform_listener.h>
#include <tf2_ros/buffer.h>
#include <geometry_msgs/TransformStamped.h>
#include <geometry_msgs/PointStamped.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.h>
class TFListenerNode {
public:
TFListenerNode() : nh_(), tf_buffer_(), tf_listener_(tf_buffer_) {
timer_ = nh_.createTimer(ros::Duration(1.0),
&TFListenerNode::timerCallback, this);
}
void timerCallback(const ros::TimerEvent&) {
// 方法一:查询变换
try {
geometry_msgs::TransformStamped transform =
tf_buffer_.lookupTransform(
"base_link", // 目标坐标系(to)
"laser_link", // 源坐标系(from)
ros::Time(0), // 查询最新时刻的变换
ros::Duration(1.0) // 等待超时时间
);
ROS_INFO("laser_link in base_link: (%.3f, %.3f, %.3f)",
transform.transform.translation.x,
transform.transform.translation.y,
transform.transform.translation.z);
} catch (tf2::TransformException& ex) {
ROS_WARN("TF lookup failed: %s", ex.what());
}
// 方法二:变换一个具体的点
geometry_msgs::PointStamped point_in_laser;
point_in_laser.header.frame_id = "laser_link";
point_in_laser.header.stamp = ros::Time(0);
point_in_laser.point.x = 1.5;
point_in_laser.point.y = 0.0;
point_in_laser.point.z = 0.0;
try {
geometry_msgs::PointStamped point_in_base;
tf_buffer_.transform(point_in_laser, point_in_base, "base_link");
ROS_INFO("Point in base_link: (%.3f, %.3f, %.3f)",
point_in_base.point.x,
point_in_base.point.y,
point_in_base.point.z);
} catch (tf2::TransformException& ex) {
ROS_WARN("Point transform failed: %s", ex.what());
}
}
private:
ros::NodeHandle nh_;
tf2_ros::Buffer tf_buffer_;
tf2_ros::TransformListener tf_listener_;
ros::Timer timer_;
};
int main(int argc, char** argv) {
ros::init(argc, argv, "tf_listener_demo");
TFListenerNode node;
ros::spin();
return 0;
}5.5 Python 编程(ROS1)
5.5.1 Python发布静态变换
python
#!/usr/bin/env python
import rospy
import tf2_ros
import geometry_msgs.msg
import tf.transformations
def publish_static_tf():
rospy.init_node('static_tf_publisher')
broadcaster = tf2_ros.StaticTransformBroadcaster()
static_tf = geometry_msgs.msg.TransformStamped()
static_tf.header.stamp = rospy.Time.now()
static_tf.header.frame_id = "base_link"
static_tf.child_frame_id = "camera_link"
# 设置平移:相机在底盘前方 0.1m,上方 0.2m
static_tf.transform.translation.x = 0.1
static_tf.transform.translation.y = 0.0
static_tf.transform.translation.z = 0.2
# 使用 tf.transformations 将欧拉角转为四元数
quat = tf.transformations.quaternion_from_euler(0, 0, 0) # roll, pitch, yaw
static_tf.transform.rotation.x = quat[0]
static_tf.transform.rotation.y = quat[1]
static_tf.transform.rotation.z = quat[2]
static_tf.transform.rotation.w = quat[3]
broadcaster.sendTransform(static_tf)
rospy.loginfo("Static TF: base_link -> camera_link published")
rospy.spin()
if __name__ == '__main__':
publish_static_tf()5.5.2 Python监听变换
python
#!/usr/bin/env python
import rospy
import tf2_ros
import tf2_geometry_msgs
from geometry_msgs.msg import PointStamped
def main():
rospy.init_node('tf_listener_py')
tf_buffer = tf2_ros.Buffer()
tf_listener = tf2_ros.TransformListener(tf_buffer)
rate = rospy.Rate(1.0) # 1 Hz
while not rospy.is_shutdown():
try:
# 等待变换可用
tf_buffer.can_transform('base_link', 'camera_link',
rospy.Time(0), rospy.Duration(1.0))
# 查询变换
trans = tf_buffer.lookup_transform(
'base_link', # 目标坐标系
'camera_link', # 源坐标系
rospy.Time(0) # 最新时刻
)
rospy.loginfo("camera_link in base_link:")
rospy.loginfo(" Translation: (%.3f, %.3f, %.3f)",
trans.transform.translation.x,
trans.transform.translation.y,
trans.transform.translation.z)
rospy.loginfo(" Rotation (quat): (%.3f, %.3f, %.3f, %.3f)",
trans.transform.rotation.x,
trans.transform.rotation.y,
trans.transform.rotation.z,
trans.transform.rotation.w)
except (tf2_ros.LookupException,
tf2_ros.ConnectivityException,
tf2_ros.ExtrapolationException) as e:
rospy.logwarn("TF lookup failed: %s", str(e))
rate.sleep()
if __name__ == '__main__':
main()5.6 欧拉角与四元数转换(ROS1)
cpp
#include <tf2/LinearMath/Quaternion.h>
#include <tf2/LinearMath/Matrix3x3.h>
// ===== 欧拉角 → 四元数 =====
double roll = 0.0;
double pitch = 0.0;
double yaw = M_PI_2; // 90度
tf2::Quaternion q;
q.setRPY(roll, pitch, yaw);
// 结果:q = (0, 0, 0.707, 0.707)
printf("Quaternion: (%.4f, %.4f, %.4f, %.4f)\n",
q.x(), q.y(), q.z(), q.w());
// ===== 四元数 → 欧拉角 =====
tf2::Matrix3x3 rot_matrix(q);
double r, p, y;
rot_matrix.getRPY(r, p, y);
printf("RPY: (%.4f, %.4f, %.4f) rad\n", r, p, y);
printf("RPY: (%.2f, %.2f, %.2f) deg\n",
r * 180/M_PI, p * 180/M_PI, y * 180/M_PI);6.ROS2 TF2实践:命令与编程
6.1 命令行工具
6.1.1 查看TF树
bash
# 生成当前 TF 树 PDF(运行后等待几秒自动保存)
ros2 run tf2_tools view_frames
# 查看生成的文件(当前目录下的 frames_XXXX.pdf)
ls *.pdf6.1.2 实时监听变换
bash
# 格式:ros2 run tf2_ros tf2_echo <source_frame> <target_frame>
# 查看 camera_link 在 base_link 中的变换
ros2 run tf2_ros tf2_echo camera_link base_link
# 输出示例:
# At time 1713000000.000000000
# - Translation: [0.100, 0.000, 0.200]
# - Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
# in RPY (radian) [0.000, 0.000, 0.000]
# in RPY (degree) [0.000, 0.000, 0.000]6.1.3 命令行发布静态变换
bash
# ROS2 格式(参数顺序与 ROS1 不同!)
# ros2 run tf2_ros static_transform_publisher x y z yaw pitch roll frame_id child_frame_id
# 注意:ROS2 中参数是 x y z yaw pitch roll(弧度)
# 例:发布 base_link → lidar_link 的静态变换
ros2 run tf2_ros static_transform_publisher \
0.0 0.0 0.3 0 0 0 base_link lidar_link
# 例:相机在前方 0.1m,上方 0.2m,绕 Z 轴旋转 90°(π/2)
ros2 run tf2_ros static_transform_publisher \
0.1 0.0 0.2 1.5707963 0 0 base_link camera_link6.1.4 查看 TF 话题
bash
# 查看动态变换话题
ros2 topic echo /tf
# 查看静态变换话题
ros2 topic echo /tf_static
# 查看发布频率
ros2 topic hz /tf6.2 C++ 编程(ROS2)
6.2.1 发布静态变换
cpp
#include <rclcpp/rclcpp.hpp>
#include <tf2_ros/static_transform_broadcaster.h>
#include <geometry_msgs/msg/transform_stamped.hpp>
#include <tf2/LinearMath/Quaternion.h>
class StaticTFPublisher : public rclcpp::Node {
public:
StaticTFPublisher() : Node("static_tf_publisher") {
tf_static_broadcaster_ =
std::make_shared<tf2_ros::StaticTransformBroadcaster>(this);
// 发布 base_link → laser_link
publishStaticTransform(
"base_link", "laser_link",
0.2, 0.0, 0.1, // x, y, z
0.0, 0.0, 0.0 // roll, pitch, yaw
);
}
private:
void publishStaticTransform(
const std::string& parent, const std::string& child,
double tx, double ty, double tz,
double roll, double pitch, double yaw)
{
geometry_msgs::msg::TransformStamped t;
t.header.stamp = this->get_clock()->now();
t.header.frame_id = parent;
t.child_frame_id = child;
t.transform.translation.x = tx;
t.transform.translation.y = ty;
t.transform.translation.z = tz;
tf2::Quaternion q;
q.setRPY(roll, pitch, yaw);
t.transform.rotation.x = q.x();
t.transform.rotation.y = q.y();
t.transform.rotation.z = q.z();
t.transform.rotation.w = q.w();
tf_static_broadcaster_->sendTransform(t);
RCLCPP_INFO(this->get_logger(),
"Static TF published: %s -> %s",
parent.c_str(), child.c_str());
}
std::shared_ptr<tf2_ros::StaticTransformBroadcaster> tf_static_broadcaster_;
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<StaticTFPublisher>());
rclcpp::shutdown();
return 0;
}6.2.2 发布动态变换(从里程计)
cpp
#include <rclcpp/rclcpp.hpp>
#include <tf2_ros/transform_broadcaster.h>
#include <geometry_msgs/msg/transform_stamped.hpp>
#include <nav_msgs/msg/odometry.hpp>
#include <tf2/LinearMath/Quaternion.h>
class OdomTFBroadcaster : public rclcpp::Node {
public:
OdomTFBroadcaster() : Node("odom_tf_broadcaster") {
tf_broadcaster_ =
std::make_shared<tf2_ros::TransformBroadcaster>(this);
odom_sub_ = this->create_subscription<nav_msgs::msg::Odometry>(
"odom", 10,
std::bind(&OdomTFBroadcaster::odomCallback, this,
std::placeholders::_1));
}
private:
void odomCallback(const nav_msgs::msg::Odometry::SharedPtr msg) {
geometry_msgs::msg::TransformStamped t;
t.header.stamp = msg->header.stamp;
t.header.frame_id = "odom";
t.child_frame_id = "base_link";
// 从里程计消息提取位置和姿态
t.transform.translation.x = msg->pose.pose.position.x;
t.transform.translation.y = msg->pose.pose.position.y;
t.transform.translation.z = msg->pose.pose.position.z;
t.transform.rotation = msg->pose.pose.orientation;
tf_broadcaster_->sendTransform(t);
}
std::shared_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;
rclcpp::Subscription<nav_msgs::msg::Odometry>::SharedPtr odom_sub_;
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<OdomTFBroadcaster>());
rclcpp::shutdown();
return 0;
}6.2.3 监听变换(ROS2 C++)
cpp
#include <rclcpp/rclcpp.hpp>
#include <tf2_ros/transform_listener.h>
#include <tf2_ros/buffer.h>
#include <geometry_msgs/msg/transform_stamped.hpp>
#include <geometry_msgs/msg/point_stamped.hpp>
#include <tf2_geometry_msgs/tf2_geometry_msgs.hpp>
class TFListenerNode : public rclcpp::Node {
public:
TFListenerNode() : Node("tf_listener_node") {
tf_buffer_ = std::make_unique<tf2_ros::Buffer>(this->get_clock());
tf_listener_ = std::make_shared<tf2_ros::TransformListener>(
*tf_buffer_, this);
timer_ = this->create_wall_timer(
std::chrono::seconds(1),
std::bind(&TFListenerNode::timerCallback, this));
}
private:
void timerCallback() {
// 查询变换
try {
geometry_msgs::msg::TransformStamped t =
tf_buffer_->lookupTransform(
"base_link", // target frame
"camera_link", // source frame
tf2::TimePointZero // latest available
);
RCLCPP_INFO(this->get_logger(),
"camera_link in base_link: (%.3f, %.3f, %.3f)",
t.transform.translation.x,
t.transform.translation.y,
t.transform.translation.z);
} catch (const tf2::TransformException& ex) {
RCLCPP_WARN(this->get_logger(),
"TF lookup failed: %s", ex.what());
}
// 变换一个点
geometry_msgs::msg::PointStamped pt_in;
pt_in.header.frame_id = "camera_link";
pt_in.header.stamp = this->get_clock()->now();
pt_in.point.x = 0.5;
pt_in.point.y = 0.0;
pt_in.point.z = 1.0;
try {
geometry_msgs::msg::PointStamped pt_out;
tf_buffer_->transform(pt_in, pt_out, "base_link");
RCLCPP_INFO(this->get_logger(),
"Point in base_link: (%.3f, %.3f, %.3f)",
pt_out.point.x, pt_out.point.y, pt_out.point.z);
} catch (const tf2::TransformException& ex) {
RCLCPP_WARN(this->get_logger(),
"Point transform failed: %s", ex.what());
}
}
std::unique_ptr<tf2_ros::Buffer> tf_buffer_;
std::shared_ptr<tf2_ros::TransformListener> tf_listener_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<TFListenerNode>());
rclcpp::shutdown();
return 0;
}6.3 Python 编程(ROS2)
6.3.1 Python发布静态变换
python
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from tf2_ros.static_transform_broadcaster import StaticTransformBroadcaster
from geometry_msgs.msg import TransformStamped
import tf_transformations # pip install tf-transformations
import math
class StaticTFPublisher(Node):
def __init__(self):
super().__init__('static_tf_publisher')
self.broadcaster = StaticTransformBroadcaster(self)
self.publish_transforms()
def publish_transforms(self):
# 1. 发布 base_link → laser_link
t1 = TransformStamped()
t1.header.stamp = self.get_clock().now().to_msg()
t1.header.frame_id = 'base_link'
t1.child_frame_id = 'laser_link'
t1.transform.translation.x = 0.0
t1.transform.translation.y = 0.0
t1.transform.translation.z = 0.3
t1.transform.rotation.x = 0.0
t1.transform.rotation.y = 0.0
t1.transform.rotation.z = 0.0
t1.transform.rotation.w = 1.0
# 2. 发布 base_link → camera_link
# 相机在前方 0.1m,上方 0.2m,俯角 15°(pitch = -15° = -π/12)
t2 = TransformStamped()
t2.header.stamp = self.get_clock().now().to_msg()
t2.header.frame_id = 'base_link'
t2.child_frame_id = 'camera_link'
t2.transform.translation.x = 0.1
t2.transform.translation.y = 0.0
t2.transform.translation.z = 0.2
# 俯角 15 度
quat = tf_transformations.quaternion_from_euler(
0, -math.pi/12, 0) # roll, pitch, yaw
t2.transform.rotation.x = quat[0]
t2.transform.rotation.y = quat[1]
t2.transform.rotation.z = quat[2]
t2.transform.rotation.w = quat[3]
# 同时发布多个静态变换
self.broadcaster.sendTransform([t1, t2])
self.get_logger().info('Static TFs published!')
def main():
rclpy.init()
node = StaticTFPublisher()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()6.3.2 Python发布动态变换(定时器驱动)
python
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
from geometry_msgs.msg import TransformStamped
import math
class DynamicTFPublisher(Node):
"""模拟一个绕圆周运动的坐标系"""
def __init__(self):
super().__init__('dynamic_tf_publisher')
self.broadcaster = TransformBroadcaster(self)
self.timer = self.create_timer(0.05, self.publish_tf) # 20Hz
self.t = 0.0
def publish_tf(self):
self.t += 0.05 # 时间步进
transform = TransformStamped()
transform.header.stamp = self.get_clock().now().to_msg()
transform.header.frame_id = 'odom'
transform.child_frame_id = 'base_link'
# 圆周运动轨迹:半径 1m,角速度 0.5 rad/s
radius = 1.0
omega = 0.5
transform.transform.translation.x = radius * math.cos(omega * self.t)
transform.transform.translation.y = radius * math.sin(omega * self.t)
transform.transform.translation.z = 0.0
# 朝向切线方向
yaw = omega * self.t + math.pi / 2
transform.transform.rotation.z = math.sin(yaw / 2)
transform.transform.rotation.w = math.cos(yaw / 2)
self.broadcaster.sendTransform(transform)
def main():
rclpy.init()
node = DynamicTFPublisher()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()6.3.3 Python监听变换(ROS2)
python
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from tf2_ros import Buffer, TransformListener, TransformException
from geometry_msgs.msg import PointStamped
import tf2_geometry_msgs # 必须导入此模块才能使用 do_transform_point
class TFListenerPy(Node):
def __init__(self):
super().__init__('tf_listener_py')
self.tf_buffer = Buffer()
self.tf_listener = TransformListener(self.tf_buffer, self)
self.timer = self.create_timer(1.0, self.on_timer)
def on_timer(self):
# 查询变换
try:
now = rclpy.time.Time()
t = self.tf_buffer.lookup_transform(
'base_link', # 目标坐标系
'laser_link', # 源坐标系
now
)
self.get_logger().info(
f'laser_link in base_link: '
f'({t.transform.translation.x:.3f}, '
f'{t.transform.translation.y:.3f}, '
f'{t.transform.translation.z:.3f})'
)
except TransformException as ex:
self.get_logger().warn(f'Cannot get transform: {ex}')
return
# 变换一个点
pt = PointStamped()
pt.header.frame_id = 'laser_link'
pt.header.stamp = self.get_clock().now().to_msg()
pt.point.x = 2.0
pt.point.y = 0.0
pt.point.z = 0.0
try:
pt_base = self.tf_buffer.transform(pt, 'base_link')
self.get_logger().info(
f'Point in base_link: '
f'({pt_base.point.x:.3f}, '
f'{pt_base.point.y:.3f}, '
f'{pt_base.point.z:.3f})'
)
except TransformException as ex:
self.get_logger().warn(f'Transform point failed: {ex}')
def main():
rclpy.init()
node = TFListenerPy()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()6.4 ROS2 Launch文件中发布静态TF
python
# my_robot.launch.py
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
# 方法一:直接在 launch 文件中发布静态 TF
Node(
package='tf2_ros',
executable='static_transform_publisher',
name='base_to_laser_tf',
arguments=[
'0', '0', '0.3', # x y z
'0', '0', '0', # yaw pitch roll
'base_link', 'laser_link'
]
),
# 方法二:发布相机 TF
Node(
package='tf2_ros',
executable='static_transform_publisher',
name='base_to_camera_tf',
arguments=[
'0.1', '0', '0.2', # x y z
'0', '0', '0', # yaw pitch roll
'base_link', 'camera_link'
]
),
# 方法三:相机 ROS 坐标系到光学坐标系的变换
Node(
package='tf2_ros',
executable='static_transform_publisher',
name='camera_to_optical_tf',
arguments=[
'0', '0', '0',
'-1.5707963', '0', '-1.5707963', # yaw pitch roll
'camera_link', 'camera_optical_frame'
]
),
])7.静态变换vs动态变换
7.1 核心区别
| 对比维度 | 静态变换 | 动态变换 |
|---|---|---|
| 适用场景 | 固定安装的传感器、机器人刚性连接 | 移动关节、里程计、随时间变化的位置 |
| 发布频率 | 只发一次(或重启时) | 持续发布(通常 10~100 Hz) |
| 话题 | /tf_static |
/tf |
| QoS | TRANSIENT_LOCAL(新订阅者可获得历史消息) | VOLATILE(只接收最新消息) |
| 广播器类 | StaticTransformBroadcaster |
TransformBroadcaster |
7.2 静态变换的特殊性
/tf_static 话题使用TRANSIENT_LOCAL QoS,意味着新加入的订阅者可以立即获得之前发布的静态变换,不需要等待下一次发布。这非常重要:
cpp
场景:机器人已运行5分钟后,Rviz2 刚启动
/tf_static(TRANSIENT_LOCAL):
Rviz2 连接后立即收到所有静态TF → 立即显示坐标系 ✅
/tf(VOLATILE):
Rviz2 必须等待下一条动态TF消息 → 最多等待1帧时间 ⚠️7.3 何时使用静态变换
应使用静态变换的情况:
- 相机固定安装在机器人上(
base_link → camera_link) - 激光雷达固定安装(
base_link → laser_link) - IMU固定安装(
base_link → imu_link) - URDF中固定关节(
<joint type="fixed">)
应使用动态变换的情况:
- 机器人里程计(
odom → base_link) - SLAM 定位(
map → odom) - 机械臂关节运动(
link1 → link2,旋转关节) - 移动的夹具或工具
8.URDF与robot_state_publisher 自动发布TF
8.1 URDF中的TF关系
URDF(Unified Robot Description Format)文件描述了机器人的结构,robot_state_publisher 节点读取URDF并自动发布机器人各关节的 TF 变换。
8.1.1 典型的简单机器人URDF示例:
xml
<?xml version="1.0"?>
<robot name="my_robot">
<!-- 底盘 -->
<link name="base_link">
<visual>
<geometry><box size="0.5 0.3 0.1"/></geometry>
</visual>
<collision>
<geometry><box size="0.5 0.3 0.1"/></geometry>
</collision>
</link>
<!-- 激光雷达 Link -->
<link name="laser_link">
<visual>
<geometry><cylinder radius="0.05" length="0.05"/></geometry>
</visual>
</link>
<!-- 激光雷达与底盘的固定关节(生成静态 TF) -->
<joint name="base_to_laser" type="fixed">
<parent link="base_link"/>
<child link="laser_link"/>
<origin xyz="0.0 0.0 0.3" rpy="0 0 0"/>
<!-- xyz: 相对父坐标系的平移,rpy: roll pitch yaw 旋转 -->
</joint>
<!-- 相机 Link -->
<link name="camera_link">
<visual>
<geometry><box size="0.04 0.1 0.04"/></geometry>
</visual>
</link>
<!-- 相机光学坐标系(x右y下z前) -->
<link name="camera_optical_frame"/>
<!-- 相机与底盘的固定关节 -->
<joint name="base_to_camera" type="fixed">
<parent link="base_link"/>
<child link="camera_link"/>
<origin xyz="0.1 0.0 0.2" rpy="0 0 0"/>
</joint>
<!-- 相机 ROS 坐标系到光学坐标系的变换 -->
<!-- 注意:这个旋转将 ROS 约定(x前y左z上) 转为 光学约定(x右y下z前) -->
<joint name="camera_to_optical" type="fixed">
<parent link="camera_link"/>
<child link="camera_optical_frame"/>
<origin xyz="0 0 0" rpy="-1.5707963 0 -1.5707963"/>
</joint>
<!-- 可旋转关节示例(生成动态 TF,需要 joint_state 输入) -->
<link name="wheel_left_link"/>
<joint name="wheel_left_joint" type="continuous">
<parent link="base_link"/>
<child link="wheel_left_link"/>
<origin xyz="0.0 0.15 -0.05" rpy="-1.5707963 0 0"/>
<axis xyz="0 0 1"/> <!-- 旋转轴 -->
</joint>
</robot>8.2 robot_state_publisher启动配置
python
# launch/display.launch.py
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import xacro
def generate_launch_description():
pkg_dir = get_package_share_directory('my_robot_description')
# 处理 URDF/XACRO 文件
xacro_file = os.path.join(pkg_dir, 'urdf', 'my_robot.urdf.xacro')
robot_description = xacro.process_file(xacro_file).toxml()
return LaunchDescription([
# robot_state_publisher:读取 URDF,发布 TF
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
parameters=[{
'robot_description': robot_description,
'publish_frequency': 50.0, # 发布频率 Hz
}]
),
# joint_state_publisher_gui:提供关节状态(用于调试)
Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
name='joint_state_publisher_gui',
),
# Rviz2 可视化
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
),
])8.3TF发布流程
当使用URDF+ robot_state_publisher时,TF的发布机制如下:
cpp
URDF 文件
│
↓ 解析
robot_state_publisher
│
├─ 固定关节(fixed joints)
│ → 直接发布到 /tf_static
│
└─ 活动关节(revolute/prismatic joints)
← 接收来自 /joint_states 的关节角度
→ 计算 TF 并发布到 /tf9.相机 TF 发布详解
相机的 TF 发布是实际项目中最常遇到的场景之一,也是最容易出错的地方,因为相机存在两种不同的坐标系约定。
9.1 两种相机坐标系
相机有两种坐标系约定,这是最容易混淆的地方:
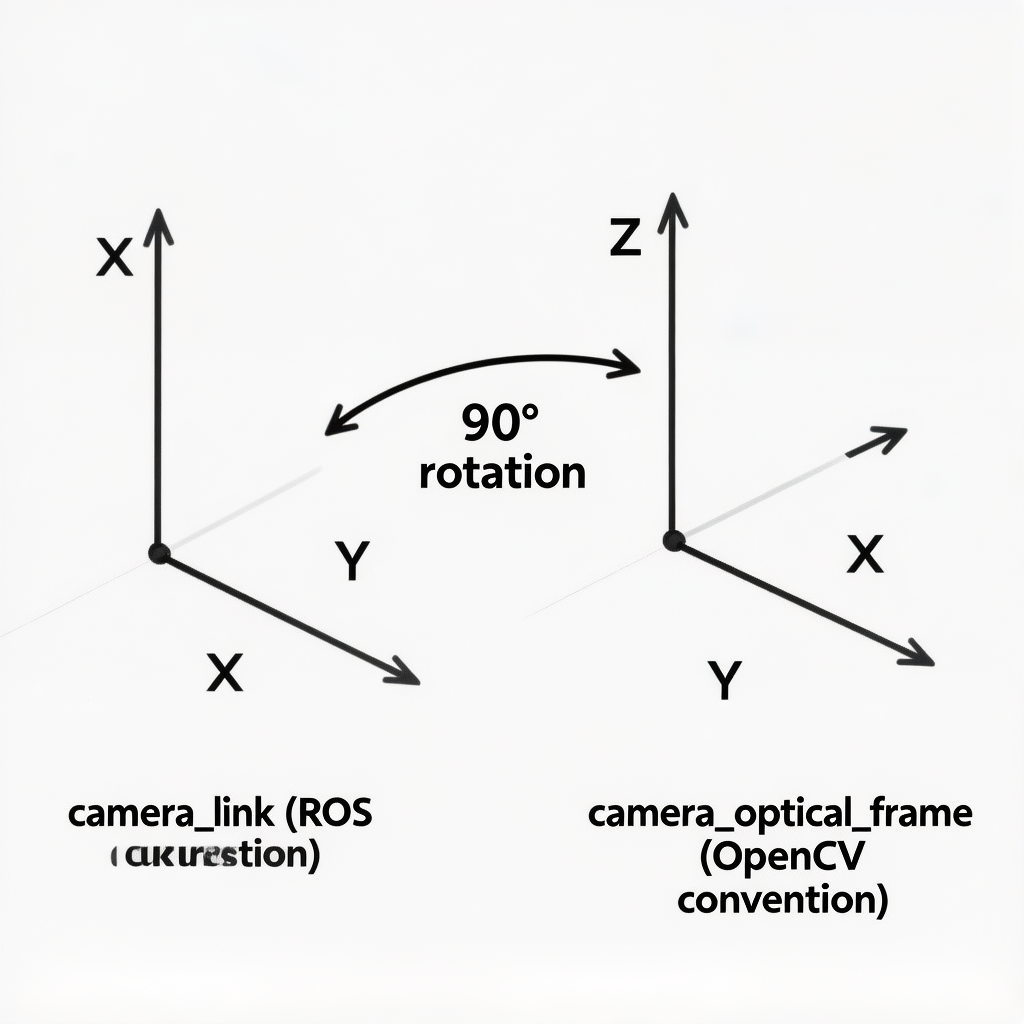
▲ 图:左侧 camera_link 遵循 ROS 机器人约定(X前Y左Z上),右侧 camera_optical_frame 遵循计算机视觉约定(X右Y下Z前)。两者之间需要旋转变换。
💡 两者的旋转关系:从camera_link变换到camera_optical_frame需要RPY = (-π/2, 0, -π/2)。
9.1.1 ROS 相机坐标系(camera_link)
遵循机器人标准约定(右手坐标系):
cpp
Z(向上)
↑
│
│
└──────→ X(向前,相机镜头朝向)
/
/
Y(向左)9.1.2 光学相机坐标系(camera_optical_frame)
遵循计算机视觉/图像处理的标准(Z轴朝外):
cpp
┌──────────────┐
│ │
│ 相机镜头 │ → Z(视线方向/光轴方向)
│ │
└──────────────┘
X 轴 → 向右(图像水平正方向)
Y 轴 ↓ 向下(图像垂直正方向)
Z 轴 → 向前(视线方向/深度方向)9.1.3 两种坐标系之间的旋转关系
从 camera_link(ROS)变换到 camera_optical_frame(光学)需要:
- 绕 Z 轴旋转 -90°(将 X-前 旋转到 Z-前)
- 再绕 X 轴旋转 -90°(将 Z-上 变为 Y-下)
用 RPY 表示为:roll=-π/2, pitch=0, yaw=-π/2
bash
# 发布 camera_link → camera_optical_frame 的 TF
# ROS1
rosrun tf static_transform_publisher 0 0 0 -1.5707963 0 -1.5707963 \
camera_link camera_optical_frame 100
# ROS2
ros2 run tf2_ros static_transform_publisher \
0 0 0 -1.5707963 0 -1.5707963 \
camera_link camera_optical_frame9.2 常见相机坐标系命名规范
| 坐标系名称 | 描述 |
|---|---|
camera_link |
相机物理位置,ROS 约定轴向 |
camera_optical_frame / camera_color_optical_frame |
彩色相机光学坐标系(x右y下z前) |
camera_depth_frame |
深度相机坐标系 |
camera_depth_optical_frame |
深度相机光学坐标系 |
camera_infra1_frame |
红外相机1坐标系 |
camera_aligned_depth_to_color_frame |
深度对齐到彩色的坐标系 |
9.3 Intel RealSense相机TF结构
Intel RealSense D435i等深度相机的完整TF树示例:
cpp
base_link
└── camera_link
├── camera_color_frame
│ └── camera_color_optical_frame
├── camera_depth_frame
│ └── camera_depth_optical_frame
├── camera_infra1_frame
│ └── camera_infra1_optical_frame
├── camera_infra2_frame
│ └── camera_infra2_optical_frame
└── camera_imu_optical_frame在 ROS2中启动RealSense时,realsense2_camera节点会自动发布这些 TF:
bash
# 安装 RealSense ROS2 包
sudo apt install ros-humble-realsense2-camera
# 启动相机节点(自动发布 TF)
ros2 launch realsense2_camera rs_launch.py
# 查看生成的 TF 树
ros2 run tf2_tools view_frames9.4 手动为相机发布TF(完整节点)
以下是一个完整的ROS2节点,演示如何为相机发布完整的TF链:
python
#!/usr/bin/env python3
"""
camera_tf_publisher.py
为相机发布完整的 TF 变换链:
base_link → camera_link → camera_color_optical_frame
→ camera_depth_optical_frame
"""
import rclpy
from rclpy.node import Node
from tf2_ros.static_transform_broadcaster import StaticTransformBroadcaster
from geometry_msgs.msg import TransformStamped
import tf_transformations
import math
class CameraTFPublisher(Node):
def __init__(self):
super().__init__('camera_tf_publisher')
# 参数声明(可通过 launch 文件或命令行覆盖)
self.declare_parameter('camera_x', 0.1) # 相机在底盘前方 x 距离
self.declare_parameter('camera_y', 0.0) # 相机在底盘 y 偏移
self.declare_parameter('camera_z', 0.2) # 相机在底盘上方 z 高度
self.declare_parameter('camera_roll', 0.0)
self.declare_parameter('camera_pitch', 0.0) # 俯角(负值向下看)
self.declare_parameter('camera_yaw', 0.0)
self.declare_parameter('base_frame', 'base_link')
self.declare_parameter('camera_frame', 'camera_link')
# 读取参数
cx = self.get_parameter('camera_x').value
cy = self.get_parameter('camera_y').value
cz = self.get_parameter('camera_z').value
cr = self.get_parameter('camera_roll').value
cp = self.get_parameter('camera_pitch').value
cyw = self.get_parameter('camera_yaw').value
base_frame = self.get_parameter('base_frame').value
camera_frame = self.get_parameter('camera_frame').value
self.static_broadcaster = StaticTransformBroadcaster(self)
transforms = []
# 1. base_link → camera_link(机器人安装位置)
t_base_to_camera = TransformStamped()
t_base_to_camera.header.stamp = self.get_clock().now().to_msg()
t_base_to_camera.header.frame_id = base_frame
t_base_to_camera.child_frame_id = camera_frame
t_base_to_camera.transform.translation.x = cx
t_base_to_camera.transform.translation.y = cy
t_base_to_camera.transform.translation.z = cz
quat = tf_transformations.quaternion_from_euler(cr, cp, cyw)
t_base_to_camera.transform.rotation.x = quat[0]
t_base_to_camera.transform.rotation.y = quat[1]
t_base_to_camera.transform.rotation.z = quat[2]
t_base_to_camera.transform.rotation.w = quat[3]
transforms.append(t_base_to_camera)
# 2. camera_link → camera_color_optical_frame(ROS坐标系→光学坐标系)
# 旋转:-90° around Z, then -90° around X
t_camera_to_optical = TransformStamped()
t_camera_to_optical.header.stamp = self.get_clock().now().to_msg()
t_camera_to_optical.header.frame_id = camera_frame
t_camera_to_optical.child_frame_id = 'camera_color_optical_frame'
t_camera_to_optical.transform.translation.x = 0.0
t_camera_to_optical.transform.translation.y = 0.0
t_camera_to_optical.transform.translation.z = 0.0
# RPY = (-π/2, 0, -π/2) 将 ROS 坐标系转为光学坐标系
quat_optical = tf_transformations.quaternion_from_euler(
-math.pi/2, 0, -math.pi/2)
t_camera_to_optical.transform.rotation.x = quat_optical[0]
t_camera_to_optical.transform.rotation.y = quat_optical[1]
t_camera_to_optical.transform.rotation.z = quat_optical[2]
t_camera_to_optical.transform.rotation.w = quat_optical[3]
transforms.append(t_camera_to_optical)
# 3. camera_link → camera_depth_optical_frame(深度相机,假设与彩色共轴)
t_camera_to_depth = TransformStamped()
t_camera_to_depth.header.stamp = self.get_clock().now().to_msg()
t_camera_to_depth.header.frame_id = camera_frame
t_camera_to_depth.child_frame_id = 'camera_depth_optical_frame'
t_camera_to_depth.transform.translation.x = 0.0
t_camera_to_depth.transform.translation.y = 0.0
t_camera_to_depth.transform.translation.z = 0.0
t_camera_to_depth.transform.rotation.x = quat_optical[0]
t_camera_to_depth.transform.rotation.y = quat_optical[1]
t_camera_to_depth.transform.rotation.z = quat_optical[2]
t_camera_to_depth.transform.rotation.w = quat_optical[3]
transforms.append(t_camera_to_depth)
# 一次发布所有静态变换
self.static_broadcaster.sendTransform(transforms)
self.get_logger().info(
f'Camera TF published: {base_frame} -> {camera_frame} '
f'at ({cx:.2f}, {cy:.2f}, {cz:.2f})'
)
def main():
rclpy.init()
node = CameraTFPublisher()
rclpy.spin(node)
rclpy.shutdown()
if __name__ == '__main__':
main()9.5 URDF中定义相机TF
在实际项目中,推荐将相机TF写入URDF文件,由robot_state_publisher 统一管理:
xml
<!-- 相机的完整 URDF 定义 -->
<link name="camera_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.025 0.09 0.025"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.025 0.09 0.025"/>
</geometry>
</collision>
</link>
<!-- base_link 到 camera_link 的安装变换 -->
<joint name="camera_joint" type="fixed">
<parent link="base_link"/>
<child link="camera_link"/>
<origin xyz="0.064 -0.047 0.107" rpy="0 0 0"/>
</joint>
<!-- camera_link 到彩色光学坐标系 -->
<link name="camera_color_frame"/>
<joint name="camera_color_joint" type="fixed">
<parent link="camera_link"/>
<child link="camera_color_frame"/>
<origin xyz="0 0.015 0" rpy="0 0 0"/>
</joint>
<link name="camera_color_optical_frame"/>
<joint name="camera_color_optical_joint" type="fixed">
<parent link="camera_color_frame"/>
<child link="camera_color_optical_frame"/>
<origin xyz="0 0 0" rpy="-1.5707963 0 -1.5707963"/>
</joint>9.6 深度相机点云坐标系变换
使用深度相机时,需要将点云从光学坐标系变换到机器人坐标系:
python
#!/usr/bin/env python3
"""将深度相机点云从光学坐标系变换到 base_link"""
import rclpy
from rclpy.node import Node
from tf2_ros import Buffer, TransformListener
import tf2_py as tf2
from sensor_msgs.msg import PointCloud2
import sensor_msgs_py.point_cloud2 as pc2
import numpy as np
class PointCloudTransformer(Node):
def __init__(self):
super().__init__('pointcloud_transformer')
self.tf_buffer = Buffer()
self.tf_listener = TransformListener(self.tf_buffer, self)
self.sub = self.create_subscription(
PointCloud2,
'/camera/depth/points',
self.cloud_callback,
10
)
self.pub = self.create_publisher(PointCloud2, '/points_in_base', 10)
def cloud_callback(self, msg):
try:
# 获取点云时间戳时的 TF 变换
transform = self.tf_buffer.lookup_transform(
'base_link',
msg.header.frame_id, # 通常是 camera_depth_optical_frame
msg.header.stamp,
timeout=rclpy.duration.Duration(seconds=0.1)
)
# 提取变换参数
tx = transform.transform.translation.x
ty = transform.transform.translation.y
tz = transform.transform.translation.z
rx = transform.transform.rotation.x
ry = transform.transform.rotation.y
rz = transform.transform.rotation.z
rw = transform.transform.rotation.w
self.get_logger().info(
f'Transform from {msg.header.frame_id} to base_link: '
f't=({tx:.3f}, {ty:.3f}, {tz:.3f})'
)
# 实际项目中使用 pcl 或 tf2_sensor_msgs 进行点云变换
# 这里仅做示意,完整实现需要 do_transform_cloud
except Exception as ex:
self.get_logger().warn(f'TF lookup failed: {ex}')
def main():
rclpy.init()
node = PointCloudTransformer()
rclpy.spin(node)
rclpy.shutdown()10.调试与可视化工具
10.1 view_frames:TF树可视化
bash
# ROS1
rosrun tf view_frames
# → 生成 frames.pdf
# ROS2
ros2 run tf2_tools view_frames
# → 生成 frames_XXXXXXXX_XXXXXXXX.pdf(时间戳命名)生成的PDF展示:
- 所有活跃坐标系节点
- 坐标系之间的父子关系
- 每个TF的发布频率
- 最新TF的时间偏移
10.2 tf2_echo:实时变换监控
bash
# ROS1
rosrun tf tf_echo /base_link /camera_link
# ROS2
ros2 run tf2_ros tf2_echo base_link camera_link
# 带刷新频率
ros2 run tf2_ros tf2_echo --hz 10 base_link camera_link
# 输出示例(连续刷新):
# At time 1713000000.000000000
# - Translation: [0.100, 0.000, 0.200]
# - Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
# in RPY (radian) [0.000, 0.000, 0.000]
# in RPY (degree) [0.000, 0.000, 0.000]10.3 rqt_tf_tree:图形化TF树
bash
# ROS1
rosrun rqt_tf_tree rqt_tf_tree
# 或
rqt --standalone rqt_tf_tree
# ROS2(需要安装)
sudo apt install ros-humble-rqt-tf-tree
ros2 run rqt_tf_tree rqt_tf_treerqt_tf_tree 提供图形化界面,实时显示 TF 树,点击节点可查看详细信息。
10.4 Rviz/Rviz2:3D可视化
在Rviz中可视化TF:
- 启动 Rviz:
rviz2 - 在左侧面板点击 Add
- 选择 TF 显示类型
- 调整参数:
- Show Names:显示坐标系名称
- Show Axes:显示坐标轴(X=红,Y=绿,Z=蓝)
- Show Arrows:显示父子连接箭头
- Marker Scale:坐标轴大小
- Update Interval:更新频率
10.5 命令行快速排查
bash
# 检查特定 TF 是否存在
ros2 run tf2_ros tf2_echo base_link laser_link 2>&1 | head -20
# 查看所有活跃的 TF 话题
ros2 topic list | grep tf
# 查看 TF 消息内容
ros2 topic echo /tf --once
# 查看 TF 发布频率
ros2 topic hz /tf
# 检查某个坐标系是否在树中
ros2 run tf2_ros tf2_echo world camera_link
# 如果不存在,会报错:'camera_link' passed to lookupTransform...11.ROS1→ ROS2 TF迁移指南
从ROS1迁移到ROS2时,TF相关代码需要注意以下变化:
11.1 API对比
| 功能 | ROS1(tf2) | ROS2(tf2) |
|---|---|---|
| 头文件(C++) | #include <tf2_ros/...> |
#include <tf2_ros/...>(基本相同) |
| 节点初始化 | ros::init() |
rclcpp::init() |
| 时间 | ros::Time::now() |
node->get_clock()->now() |
| 最新时刻 | ros::Time(0) |
tf2::TimePointZero |
| 等待变换 | waitForTransform() |
lookup_transform(..., timeout) |
| 消息类型 | geometry_msgs::TransformStamped |
geometry_msgs::msg::TransformStamped |
11.2 命令行工具对比
| 功能 | ROS1 | ROS2 |
|---|---|---|
| 查看 TF 树 | rosrun tf view_frames |
ros2 run tf2_tools view_frames |
| 监听变换 | rosrun tf tf_echo /A /B |
ros2 run tf2_ros tf2_echo A B |
| 发布静态变换 | rosrun tf static_transform_publisher x y z yaw pitch roll A B ms |
ros2 run tf2_ros static_transform_publisher x y z yaw pitch roll A B |
| 图形化 TF 树 | rosrun rqt_tf_tree rqt_tf_tree |
ros2 run rqt_tf_tree rqt_tf_tree |
11.3 静态变换参数顺序变化
⚠️ 重要变化:
bash
# ROS1:x y z yaw pitch roll frame_id child_frame_id period_ms
rosrun tf static_transform_publisher 0 0 0.3 0 0 0 base_link laser 100
# ROS2:x y z yaw pitch roll frame_id child_frame_id
ros2 run tf2_ros static_transform_publisher 0 0 0.3 0 0 0 base_link laser主要区别:
- ROS2 无需
period_ms参数(静态变换只发一次) - 参数顺序完全相同(
yaw pitch roll)
11.4 Python API迁移
python
# ===== ROS1 =====
import rospy, tf2_ros
tf_buffer = tf2_ros.Buffer()
tf_listener = tf2_ros.TransformListener(tf_buffer)
# 等待变换
tf_buffer.can_transform('target', 'source', rospy.Time(0), rospy.Duration(1.0))
# 查询变换
t = tf_buffer.lookup_transform('target', 'source', rospy.Time(0))
# ===== ROS2 =====
import rclpy
from tf2_ros import Buffer, TransformListener
tf_buffer = Buffer()
tf_listener = TransformListener(tf_buffer, self) # 需要传入节点
# 查询变换(ROS2 中直接用 lookup_transform 并设置超时)
t = tf_buffer.lookup_transform(
'target', 'source',
rclpy.time.Time(), # 对应 ROS1 的 rospy.Time(0)
timeout=rclpy.duration.Duration(seconds=1.0)
)12.常见问题与解决方案
12.1 "Could not find a connection between 'X' and 'Y'"
原因:两个坐标系不在同一棵 TF 树上(没有连接路径)。
排查步骤:
bash
# 1. 查看当前 TF 树
ros2 run tf2_tools view_frames
# 2. 检查是否有两棵独立的 TF 树
# 看 frames.pdf 中是否有断开的子树
# 3. 确认发布节点是否在运行
ros2 node list
ros2 topic echo /tf_static --once
# 解决方案:
# 添加缺失的 TF 变换,连接两棵子树12.2 "Extrapolation into the future"
原因:查询的时间戳比 TF 缓存中最新的变换还新(时钟不同步或延迟)。
python
# 错误做法:用当前时间戳查询(可能超出缓存)
t = tf_buffer.lookup_transform('A', 'B', self.get_clock().now())
# 正确做法:查询最新可用时刻(rclpy.time.Time() 等价于 ROS1 的 Time(0))
t = tf_buffer.lookup_transform('A', 'B', rclpy.time.Time())
# 或者带超时等待
from rclpy.duration import Duration
t = tf_buffer.lookup_transform('A', 'B', rclpy.time.Time(),
timeout=Duration(seconds=1.0))12.3 "Extrapolation into the past"
原因:查询的时间戳比 TF 缓冲区保存的最早时间还旧(超过 10 秒缓冲)。
python
# 延长 TF 缓冲时间(ROS2)
from rclpy.duration import Duration
tf_buffer = Buffer(cache_time=Duration(seconds=30.0))12.4 TF 树形成循环(Loop Detected)
原因:某个坐标系被发布了两个不同的父节点,形成循环。
bash
# 检查
ros2 run tf2_tools view_frames
# 查看 PDF 中是否有循环
# 常见原因:
# - URDF 定义了 map → odom,同时 SLAM 节点也发布 map → odom
# - 解决:确保每个 TF 只有一个发布者12.5 TF 发布频率过低导致抖动
原因:动态 TF 发布频率太低,查询时需要大量插值。
python
# 建议频率:
# - 里程计 TF(odom → base_link):≥ 20 Hz,推荐 50 Hz
# - SLAM TF(map → odom):≥ 5 Hz,推荐 10 Hz
# - 传感器数据相关 TF:与传感器频率相匹配
# 提高发布频率示例(ROS2)
self.timer = self.create_timer(0.02, self.publish_tf) # 50 Hz12.6 时间戳不一致(Time Stamp Mismatch)
原因:传感器数据的时间戳与 TF 发布的时间戳不对齐。
python
# 错误:使用当前时间,不与传感器数据时间对齐
t.header.stamp = self.get_clock().now().to_msg()
# 正确:使用与传感器数据相同的时间戳
def sensor_callback(self, msg):
t.header.stamp = msg.header.stamp # 使用传感器时间戳
self.tf_broadcaster.sendTransform(t)12.7 静态TF在Rviz中不显示
可能原因及解决方案:
bash
# 1. 检查 /tf_static 是否有消息
ros2 topic echo /tf_static --once
# 2. 检查 Fixed Frame 设置是否正确(Rviz 中设为 TF 树的根节点)
# Rviz2 → Global Options → Fixed Frame → 改为 base_link 或 map
# 3. 确认静态 TF 节点是否在运行
ros2 node list | grep tf
# 4. 尝试重新发布
ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 base_link camera_link13.综合实战:多传感器TF构建
13.1 场景描述
构建一个典型的自主移动机器人的完整TF系统,包含:
- 激光雷达(顶部,固定安装)
- RGB-D 深度相机(前方,固定安装,俯角 15°)
- IMU(底盘内部,固定安装)
- 里程计(驱动层发布)
- SLAM 定位(发布 map → odom)
13.2 完整的URDF描述
xml
<?xml version="1.0"?>
<robot name="autonomous_robot"
xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- 定义常量 -->
<xacro:property name="PI" value="3.14159265358979"/>
<xacro:property name="base_width" value="0.4"/>
<xacro:property name="base_length" value="0.5"/>
<xacro:property name="base_height" value="0.15"/>
<!-- ===== 底盘 ===== -->
<link name="base_link">
<visual>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
<material name="blue"><color rgba="0.2 0.4 0.8 1.0"/></material>
</visual>
<collision>
<geometry>
<box size="${base_length} ${base_width} ${base_height}"/>
</geometry>
</collision>
<inertial>
<mass value="10.0"/>
<inertia ixx="0.1" ixy="0" ixz="0" iyy="0.1" iyz="0" izz="0.1"/>
</inertial>
</link>
<!-- ===== 激光雷达 ===== -->
<link name="laser_link">
<visual>
<geometry><cylinder radius="0.05" length="0.08"/></geometry>
<material name="black"><color rgba="0.1 0.1 0.1 1.0"/></material>
</visual>
</link>
<joint name="base_to_laser" type="fixed">
<parent link="base_link"/>
<child link="laser_link"/>
<!-- 激光雷达在底盘顶部中心,高 0.3m -->
<origin xyz="0.0 0.0 0.3" rpy="0 0 0"/>
</joint>
<!-- ===== 深度相机 ===== -->
<link name="camera_link">
<visual>
<geometry><box size="0.025 0.09 0.025"/></geometry>
<material name="silver"><color rgba="0.8 0.8 0.8 1.0"/></material>
</visual>
</link>
<joint name="base_to_camera" type="fixed">
<parent link="base_link"/>
<child link="camera_link"/>
<!-- 相机在底盘前方 0.2m,上方 0.1m,俯角 15° -->
<origin xyz="0.2 0.0 0.1" rpy="0 ${-PI/12} 0"/>
</joint>
<!-- 相机光学坐标系 -->
<link name="camera_depth_optical_frame"/>
<joint name="camera_to_depth_optical" type="fixed">
<parent link="camera_link"/>
<child link="camera_depth_optical_frame"/>
<origin xyz="0 0 0" rpy="${-PI/2} 0 ${-PI/2}"/>
</joint>
<link name="camera_color_optical_frame"/>
<joint name="camera_to_color_optical" type="fixed">
<parent link="camera_link"/>
<child link="camera_color_optical_frame"/>
<origin xyz="0 -0.015 0" rpy="${-PI/2} 0 ${-PI/2}"/>
</joint>
<!-- ===== IMU ===== -->
<link name="imu_link"/>
<joint name="base_to_imu" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<!-- IMU 在底盘中心 -->
<origin xyz="0.0 0.0 0.0" rpy="0 0 0"/>
</joint>
<!-- ===== 左右驱动轮 ===== -->
<link name="wheel_left_link">
<visual>
<geometry><cylinder radius="0.1" length="0.05"/></geometry>
<material name="dark"><color rgba="0.2 0.2 0.2 1.0"/></material>
</visual>
</link>
<joint name="wheel_left_joint" type="continuous">
<parent link="base_link"/>
<child link="wheel_left_link"/>
<origin xyz="0.0 0.2 -0.1" rpy="${-PI/2} 0 0"/>
<axis xyz="0 0 1"/>
</joint>
<link name="wheel_right_link">
<visual>
<geometry><cylinder radius="0.1" length="0.05"/></geometry>
<material name="dark"><color rgba="0.2 0.2 0.2 1.0"/></material>
</visual>
</link>
<joint name="wheel_right_joint" type="continuous">
<parent link="base_link"/>
<child link="wheel_right_link"/>
<origin xyz="0.0 -0.2 -0.1" rpy="${PI/2} 0 0"/>
<axis xyz="0 0 1"/>
</joint>
</robot>13.3 完整的Launch文件
python
# launch/robot_tf_demo.launch.py
import os
import xacro
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
pkg_dir = get_package_share_directory('my_robot_bringup')
# 处理 XACRO 文件
urdf_file = os.path.join(pkg_dir, 'urdf', 'autonomous_robot.urdf.xacro')
robot_description = xacro.process_file(urdf_file).toxml()
return LaunchDescription([
# 1. robot_state_publisher(发布 URDF 中定义的所有固定 TF)
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
parameters=[{
'robot_description': robot_description,
'publish_frequency': 50.0,
'use_sim_time': False,
}]
),
# 2. joint_state_publisher(发布轮子关节状态,触发动态 TF)
Node(
package='joint_state_publisher',
executable='joint_state_publisher',
name='joint_state_publisher',
),
# 3. 驱动节点(发布 odom → base_link 的动态 TF)
# 实际项目中替换为真实的驱动节点
Node(
package='my_robot_driver',
executable='diff_drive_controller',
name='diff_drive_controller',
output='screen',
),
# 4. SLAM 节点(发布 map → odom 的动态 TF)
# 实际项目中使用 slam_toolbox 或 cartographer
Node(
package='slam_toolbox',
executable='async_slam_toolbox_node',
name='slam_toolbox',
output='screen',
parameters=[{
'use_sim_time': False,
}]
),
# 5. Rviz2 可视化
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', os.path.join(pkg_dir, 'config', 'robot.rviz')],
),
])13.4 最终TF树结构
运行上述配置后,完整的 TF 树如下:
map (SLAM 定位)
└── odom (里程计)
└── base_link (机器人底盘)
├── laser_link (激光雷达)
├── camera_link (深度相机)
│ ├── camera_color_optical_frame
│ └── camera_depth_optical_frame
├── imu_link (IMU)
├── wheel_left_link (左轮,动态)
└── wheel_right_link (右轮,动态)13.5 验证TF树正确性
bash
# 步骤1:查看 TF 树结构
ros2 run tf2_tools view_frames
# 打开生成的 PDF,确认树结构正确
# 步骤2:验证关键变换链
# 激光雷达到地图的完整链
ros2 run tf2_ros tf2_echo map laser_link
# 相机到地图的完整链
ros2 run tf2_ros tf2_echo map camera_color_optical_frame
# 步骤3:在 Rviz2 中确认
rviz2
# Fixed Frame → map
# 添加 TF 显示
# 添加 LaserScan(frame = laser_link)
# 添加 PointCloud2(frame = camera_depth_optical_frame)
# 确认传感器数据在地图中位置正确
# 步骤4:数值验证
# 激光雷达应在 base_link 正上方 0.3m
ros2 run tf2_ros tf2_echo base_link laser_link
# 期望输出 Translation: [0.000, 0.000, 0.300]
# 相机应在 base_link 前方 0.2m、上方 0.1m
ros2 run tf2_ros tf2_echo base_link camera_link
# 期望输出 Translation: [0.200, 0.000, 0.100]14.常用 TF 命令速查表
14.1 ROS1命令
| 命令 | 描述 |
|---|---|
rosrun tf view_frames |
生成 TF 树 PDF |
rosrun tf tf_echo /A /B |
监听 A→B 变换 |
rosrun tf tf_monitor |
监控所有 TF |
rosrun tf static_transform_publisher x y z yaw pitch roll A B ms |
发布静态变换 |
rosrun rqt_tf_tree rqt_tf_tree |
图形化 TF 树 |
rostopic echo /tf |
查看 TF 话题 |
14.2 ROS2命令
| 命令 | 描述 |
|---|---|
ros2 run tf2_tools view_frames |
生成 TF 树 PDF |
ros2 run tf2_ros tf2_echo A B |
监听 A→B 变换 |
ros2 run tf2_ros static_transform_publisher x y z yaw pitch roll A B |
发布静态变换 |
ros2 run rqt_tf_tree rqt_tf_tree |
图形化 TF 树 |
ros2 topic echo /tf |
查看动态 TF 话题 |
ros2 topic echo /tf_static |
查看静态 TF 话题 |
ros2 topic hz /tf |
查看 TF 发布频率 |
14.3 常用坐标系名称参考
| 坐标系名称 | 含义 |
|---|---|
map |
全局地图坐标系 |
odom |
里程计坐标系 |
base_link |
机器人底盘坐标系 |
base_footprint |
机器人在地面上的投影坐标系 |
laser_link / scan |
激光雷达坐标系 |
camera_link |
相机物理安装坐标系(ROS 约定) |
camera_optical_frame |
相机光学坐标系(CV 约定) |
imu_link |
IMU 坐标系 |
gps_link |
GPS 天线坐标系 |
14.4 包依赖速查(CMakeLists.txt)
cmake
# ROS1
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
tf2
tf2_ros
tf2_geometry_msgs
geometry_msgs
)
# ROS2(CMakeLists.txt)
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(tf2_geometry_msgs REQUIRED)
find_package(geometry_msgs REQUIRED)
xml
<!-- ROS2(package.xml) -->
<depend>rclcpp</depend>
<depend>tf2</depend>
<depend>tf2_ros</depend>
<depend>tf2_geometry_msgs</depend>
<depend>geometry_msgs</depend>参考资源
- ROS 官方文档:wiki.ros.org/tf2
- ROS2 官方教程:docs.ros.org/en/humble/Tutorials
- REP-105(坐标系约定):ros.org/reps/rep-0105
- REP-103(单位与坐标约定):ros.org/reps/rep-0103
- tf2 GitHub:github.com/ros2/geometry2