机器视觉系统是通过声波、电磁辐射等时空模式进行探测和感知,对所获得的图像自动分析处理、测量,做出定性解释和定量分析,得到有关目标物体场景的某种认识并做出相应决策的有机整体。工业相机作为机器视觉系统中的关键硬件之一,其选型至关重要。
工业相机最本质的功能就是将光信号转变成有序的电信号。工业相机工作过程可以概括为图像收集、光电转换、信号处理。通过镜头收集被摄物的反射活透射光线,将其聚焦在图像传感器上(CCD或CMOS);传感器将光信号转换为电信号;转换后的电信号经过放大器进行放大,并通过模数转换器(ADC)将模拟信号转换为数字信号,这些数字信号经过处理后形成数字图像数据,传输给计算机等设备进行后续分析。
工业相机选型时要考虑的几个维度:
1、面阵还是线阵
面阵工业相机是一次曝光可获取一整幅二维图像,测量结果直观,但是单帧图像的视野和分辨率受物理像素数量限制,要同时看很大范围又看很细,需要多相机或牺牲效率。
线阵工业相机是像素呈单行或几行排列,通过运动来构建二维图像。在运动方向上可实现超高分辨率,视野理论上无限长。但是对系统的同步控制要求极高。
面阵相机适合绝大多数对静态或低速物体 进行直观检测的场景;线阵相机专为高速运动、连续表面或需要超大视野、超高精度的特殊场景使用。
2、黑白还是彩色
黑白相机仅记录光的强度(灰度)信息,分辨率更高、细节更清晰,帧率更快,对红外等可见光更敏感。但是不能提供颜色信息。
彩色工业相机能提供直观的颜色信息,但是插值计算会引入伪色和细节损失。
3、全局快门or卷帘快门
全局快门是通过全局复位信号来实现所有像素的同时曝光和信号暂存。
它是精确测量和高速视觉引导的"刚需",能保证运动物体边缘位置的精确性。但是同样尺寸下,动态范围和灵敏度会略低于同规格的卷帘快门传感器。
卷帘快门的传感器逐行(或逐列)进行曝光,每行的曝光时间点有微小差异。像素结构简单,静态画质潜力更佳,拥有出色的低照表现与动态范围。但是易发生果冻效应,在频闪光源下拍摄可能还会出现部分画面亮、部分画面暗的条带现象。
4、视野
工业相机的视野(Field of View, FOV)是指相机通过镜头能够观测到的实际物体区域范围,通常用宽度(FOVw)和高度(FOVh)表示,单位为毫米(mm)。
5、精度
工业相机的精度并非单一固定值,而是取决于具体应用场景、系统配置和测量需求。
像素级精度是指单个像素对应的实际物体尺寸,计算公式为:
像素精度 = 视野范围 / 相机分辨率
6、芯片尺寸
工业相机的芯片尺寸(也称传感器尺寸或靶面尺寸)是指感光芯片的物理大小,通常以英寸(如1/2.3"、1"、2/3"等)或毫米(如12.8mm × 9.6mm)表示。
7、数据接口
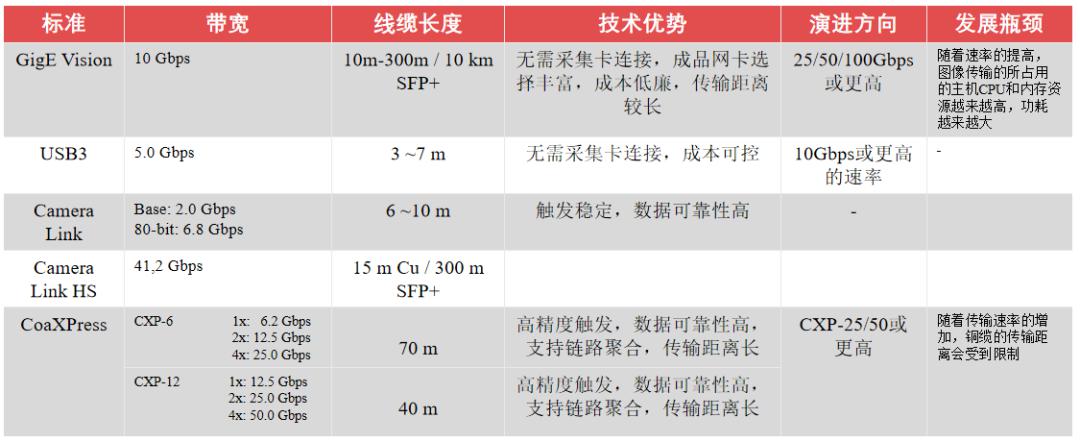
根据带宽(速度)、距离、成本和稳定性要求综合选择接口。GigE 适用于大多数工厂自动化场景;USB3 适合桌面和短距离应用;Camera Link 和 CoaXPress 则面向高端高速需求。