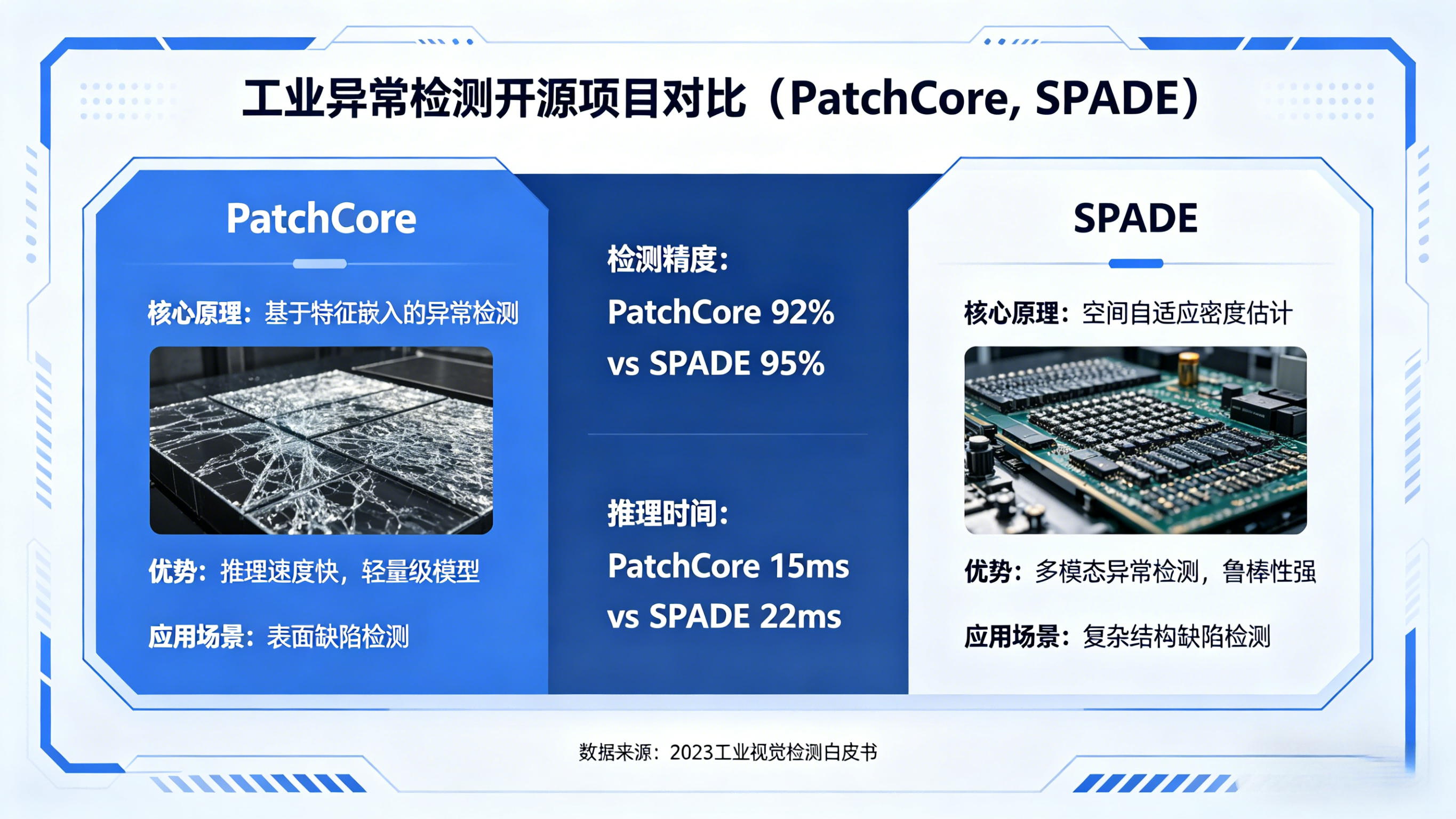
工业视觉检测:两大主流异常检测开源框架深度对比(PatchCore vs SPADE)
在工业视觉检测的落地实践中,最大的痛点往往不是算法模型不够深,而是缺陷样本太少,甚至一张都没有 。面对这种"无监督学习"的刚需,基于图像分割的异常检测技术成为了救星。其中,PatchCore 和 SPADE 无疑是目前工业界表现最出色、引用率最高的两个开源框架。
这两个项目都基于同一个核心思想:利用大规模预训练的深度学习模型(如ResNet)提取图像特征,在"正常样本"的特征空间中建立参考库。 检测时,如果待测图像的特征无法在参考库中找到近邻,即被判定为异常。
虽然底层逻辑相似,但在具体的工程实现、内存占用和检测精度上,二者有着显著的差异。如果你正准备在项目中引入工业异常检测技术,这篇深度对比将帮你决定该选择哪条技术路线。
核心原理的异同
在对比之前,我们需要明确它们的共同基础:特征嵌入与记忆库(Memory Bank)。
- 特征提取:二者都使用在大型自然图像数据集(如ImageNet)上预训练的卷积神经网络(通常采用ResNet-50)作为骨干网络。这些网络的中间层特征能够很好地捕捉图像的纹理和结构信息。
- 构建正常模型:在训练阶段,只输入"OK"(良品)样本。算法会提取这些样本的深层特征,并将其存储在磁盘或内存中,形成一个"正常样本特征库"。
二者的区别在于"如何存储"和"如何比对":
PatchCore:基于"核心子集"的极致优化
PatchCore 的全称是 Patch-based Benchmarking of Industrial Anomaly Detection 。它本质上是对早期方法(如SPADE)的一种大规模优化。
1. 核心机制:
PatchCore认为,并不是所有的图像块(Patch)特征都是有用的。如果把所有正常样本的特征都存下来,内存占用巨大,且包含大量冗余信息(比如天空、纯色背景的特征)。
- 核心集采样:PatchCore引入了一种"最大正向距离"或聚类采样的策略。它会从海量的正常样本特征中,挑选出最具代表性的"核心子集"存入记忆库。这就好比从一个班级的无数次考试中,挑出最能代表学生正常水平的几次考试成绩来建档。
2. 优势:
- 内存占用极小:由于只保留了核心特征,PatchCore的记忆库非常轻量。这使得它在资源受限的边缘计算设备上部署成为可能。
- 推理速度较快:比对时只需要搜索核心集,而不是全量特征,速度得到了优化。
- 精度更高:去除了冗余特征的干扰,模型对细微异常的敏感度反而提升了。
SPADE:基于"空间感知"的特征重构
SPADE (Sub-Image Anomaly Detection with Deep Pyramid Structured Semantic Descriptor ) 是早期的开创性工作,它更侧重于利用特征图的空间结构信息。
1. 核心机制:
SPADE在提取特征时,会保留特征图的空间位置信息,并构建一个多尺度的特征描述子。
- 空间金字塔:它不仅仅看"是什么特征",还看"特征在什么位置"。例如,一个螺丝孔的特征必须出现在图像的左上角才是正常的,如果在右下角出现了同样的特征,可能就是异常。
- 特征重构:在检测时,它会尝试用记忆库中的特征来"重构"待测图像的特征。如果重构误差过大,即判定为异常。
2. 优势:
- 对位置敏感:对于那些位置固定、结构复杂的工业零件(如电路板),SPADE利用空间信息能有效检测出"错装"或"漏装"。
- 多尺度描述:通过金字塔结构,它能同时捕捉大范围的结构异常和局部的纹理异常。
实战对比:如何选型?
为了方便你在项目中做出决策,我们总结了以下对比维度:
| 维度 | SPADE | PatchCore |
|---|---|---|
| 核心思想 | 利用全量特征库进行重构,保留空间位置信息 | 采样出核心特征子集,去除冗余 |
| 内存占用 | 高(需存储大量特征图) | 低(仅存储核心子集) |
| 检测精度 | 高(尤其在结构化场景) | 极高(SOTA水平,泛化能力更强) |
| 位置敏感度 | 高(擅长检测位置错乱) | 中(更侧重于纹理/语义异常) |
| 部署难度 | 中等(资源消耗较大) | 较易(轻量化,适合工业落地) |
选型建议:
-
首选 PatchCore 的场景:
- 资源受限:你的工控机或嵌入式设备内存有限,无法承载巨大的特征库。
- 纹理/表面缺陷:检测目标是金属表面划痕、织物污渍、塑料件气泡等,这些主要依赖纹理特征,对绝对位置不敏感。
- 追求极致精度:PatchCore目前在MVTec AD等主流工业异常检测数据集上,通常表现优于SPADE。
-
考虑 SPADE 的场景:
- 结构化组件:检测对象是复杂的电路板(PCB)、发动机缸体等。除了表面划痕,你还需要检测零件是否装反、孔位是否错位。此时SPADE的空间感知能力会有优势。
- 数据量极小:如果你的正常样本非常少(少于50张),SPADE的全量存储策略可能比PatchCore的采样策略更稳定,因为采样需要一定的数据量来保证代表性。
总结
PatchCore 和 SPADE 都是工业异常检测领域的里程碑式工作。简单来说,SPADE 是"前辈",奠定了特征嵌入的基础;而 PatchCore 是"后浪",通过核心集采样解决了内存瓶颈,将该技术推向了更广泛的工业落地。
在实际项目中,建议优先尝试 PatchCore ,它在大多数场景下都能提供更优的性价比。如果遇到位置敏感型的检测难题,再回过头来研究基于空间重构的 SPADE 及其变体。