波士顿动力Spot机器人功能载荷 vs AiBrainBox-UGV通、感、算、控一体七层架构
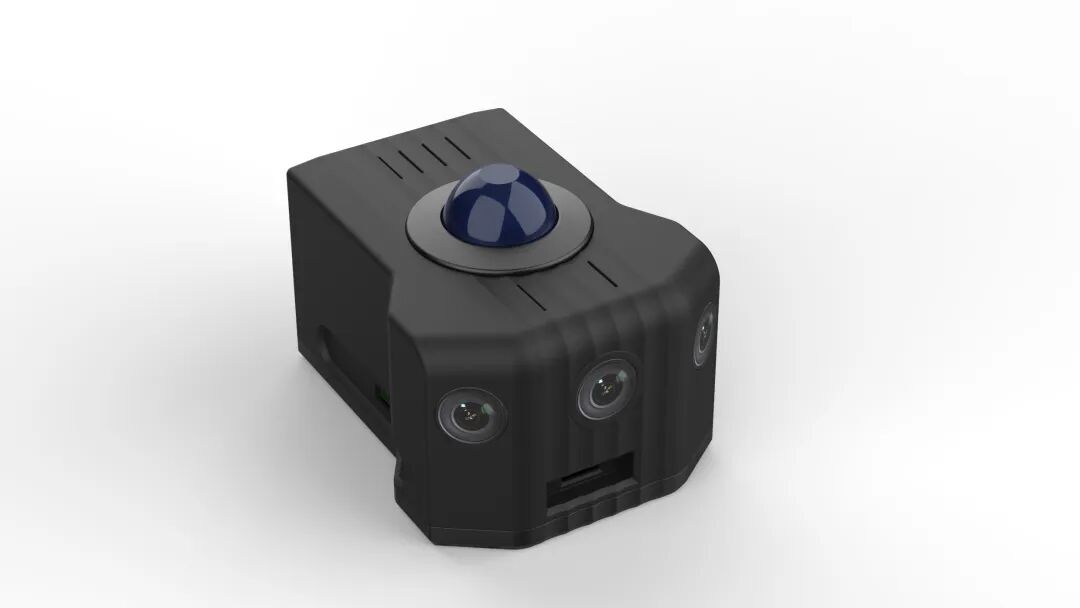
波士顿动力Spot机器人功能载荷CAM+IR、EAP2、MPU5


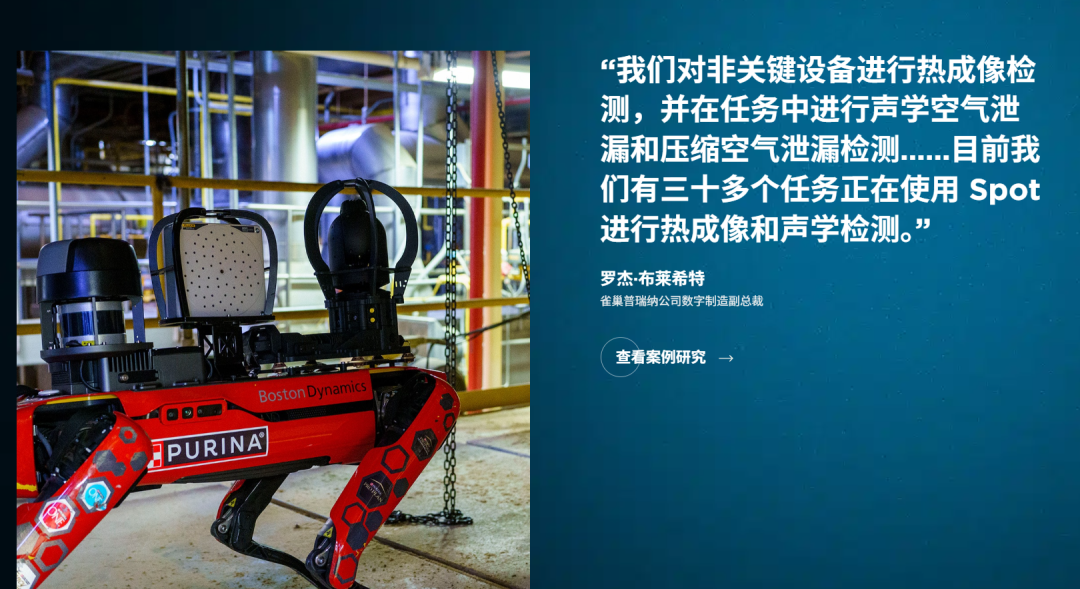
Spot EAP 2 增强了 Spot 平台的自主性、计算能力和通信能力。
利用激光雷达提升 Spot 的自主导航能力,其探测范围可达 100 米。轻松配置传感器、摄像头和其他设备等输入,并将收集到的数据处理成可执行的洞察。

Spot Cam+ 有效载荷使 Spot 变成了一款功能强大的检测工具,配备了专用摄像头。在日常和危险情况下,实现视觉和热成像检查的自动化,并获得态势感知。

Persistent Systems MPU5 无线电套件可实现 Spot 与其操作员之间的点对点通信。


AiBrainBox-UGV 七层总体架构图
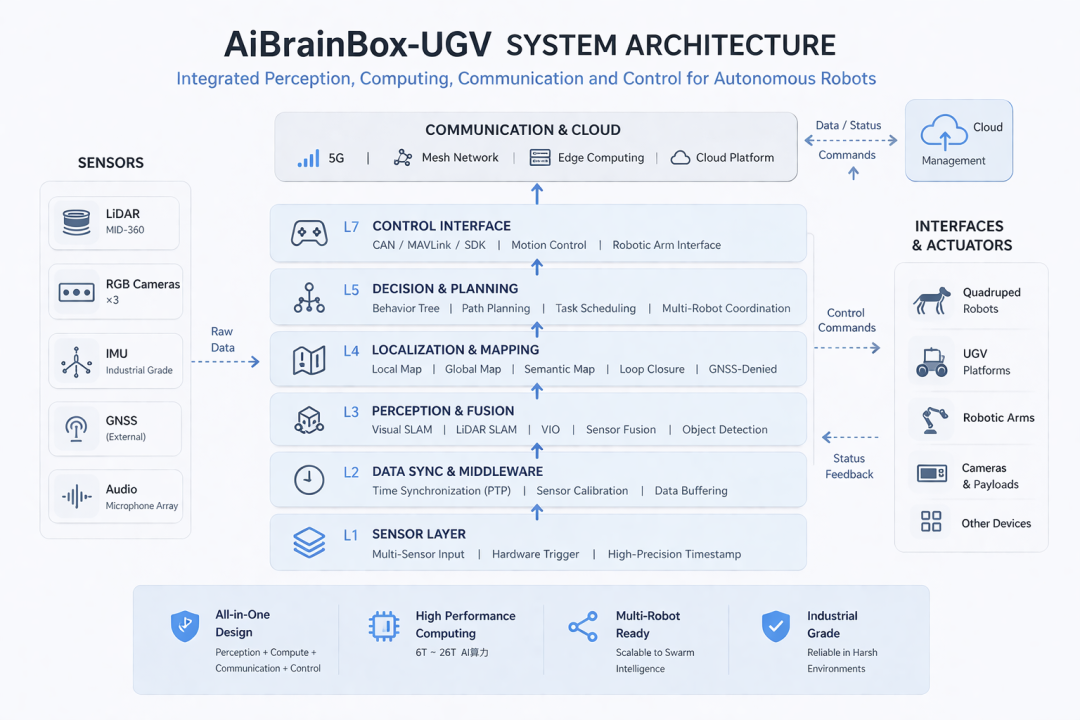
🔷 Layer 1 --- Sensor Layer(感知层)
-
LiDAR(MID-360)
-
RGB Cameras ×3(环视)
-
IMU(工业级)
-
GNSS(外接)
-
Audio(声音采集)
- 硬件时间同步(PTP / Trigger)
- 多传感器标定系统
🔷 Layer 2 --- Data Acquisition & Sync(数据采集与同步)
-
时间戳统一
-
数据缓存(环形buffer)
-
数据对齐(视觉 + 雷达 + IMU)
🔷 Layer 3 --- Perception & Fusion(感知融合层)
-
Visual SLAM
-
LiDAR SLAM
-
VIO(视觉惯性里程计)
-
雷视融合定位(LiDAR + Camera)
-
目标检测(YOLO / Transformer)
输出:
-
位姿(Pose)
-
点云地图
-
语义信息
🔷 Layer 4 --- Localization & Mapping(定位与地图)
-
局部地图(Local Map)
-
全局地图(Global Map)
-
语义地图(Semantic Map)
-
回环检测(Loop Closure)
GNSS拒止环境稳定定位
🔷 Layer 5 --- Decision & Planning(决策与规划)
-
行为树(Behavior Tree)
-
路径规划(A* / D* / RRT)
-
任务调度(Task Scheduler)
- 多机器人协同任务
🔷 Layer 6 --- Control Interface(控制接口层)
-
LAN/USB/CAN / SDK接口
-
位置 / 速度 / 姿态控制
-
机械臂控制接口
🔷 Layer 7 --- Communication & Cloud(通信与云)
-
5G通信
-
Mesh自组网
-
边缘计算
-
云端调度
-
多机协同
-
数据回传
-
远程控制
Q&A : AiBrainBox-UGV和SPOT的载荷比较
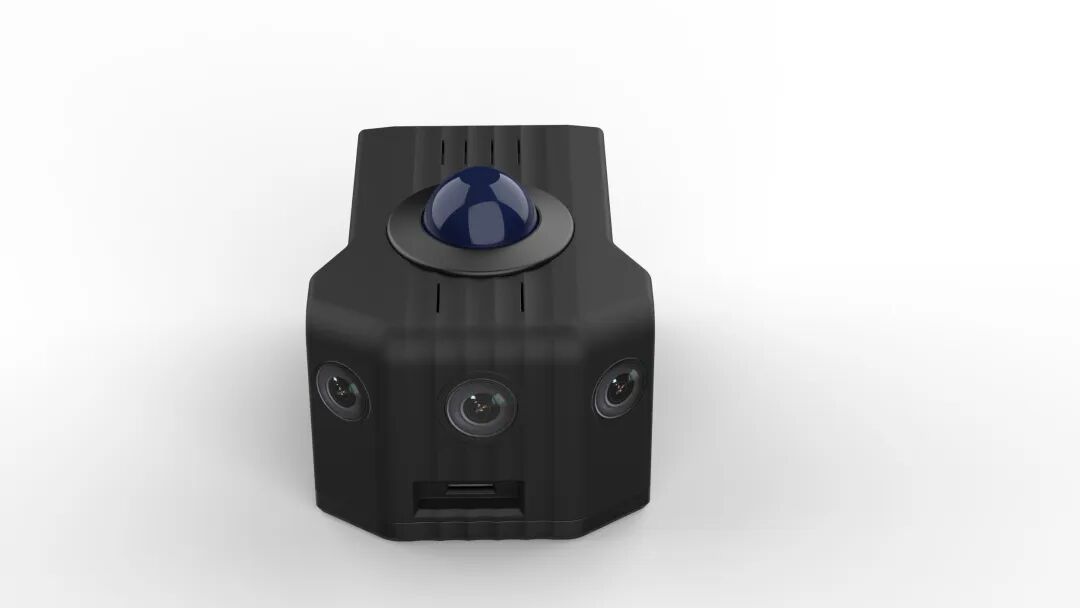
AiBrainBox-UGV是通、感算、控一体化设备,整合度比单一的SPOT载荷更有优势。
-
AiBrainBox-UGV实现了和机器狗/无人车的解耦,SPOT的载荷是和SPOT深度绑定,不能适配其他执行体。
-
多传感器融合定位方面,EAP2仅采用了激光雷达+GNSS,AiBrainBox-UGV融合了GNSS+激光雷达+可见光+工业级IMU多模态传感器融合,强调适应更复杂的地下空间。
-
Spot Cam+具备了云台可见光+红外相机,AiBrainBox-UGV需要外接类似设备。Spot Cam+ 实现了360°环视, AiBrainBox-UGV采用三目广角实现240°的环视。Spot Cam+增加了补光设计, AiBrainBox-UGV这部分设计考虑中。 Spot Cam+没有AI推理能力,AiBrainBox-UGV支持边缘AI推理。
-
AiBrainBox-UG融合自组网通讯,支持64节点MESH通讯,支持1.4G或700M;SPOT的MPU5仅支持点到点,采用2.4G频段。
-
AiBrainBox-UGV自带声源采集能力,SPOT采用外接专用的定向麦克风。SPOT支持扬声器,AiBrainBox-UGV采用外接模块实现。
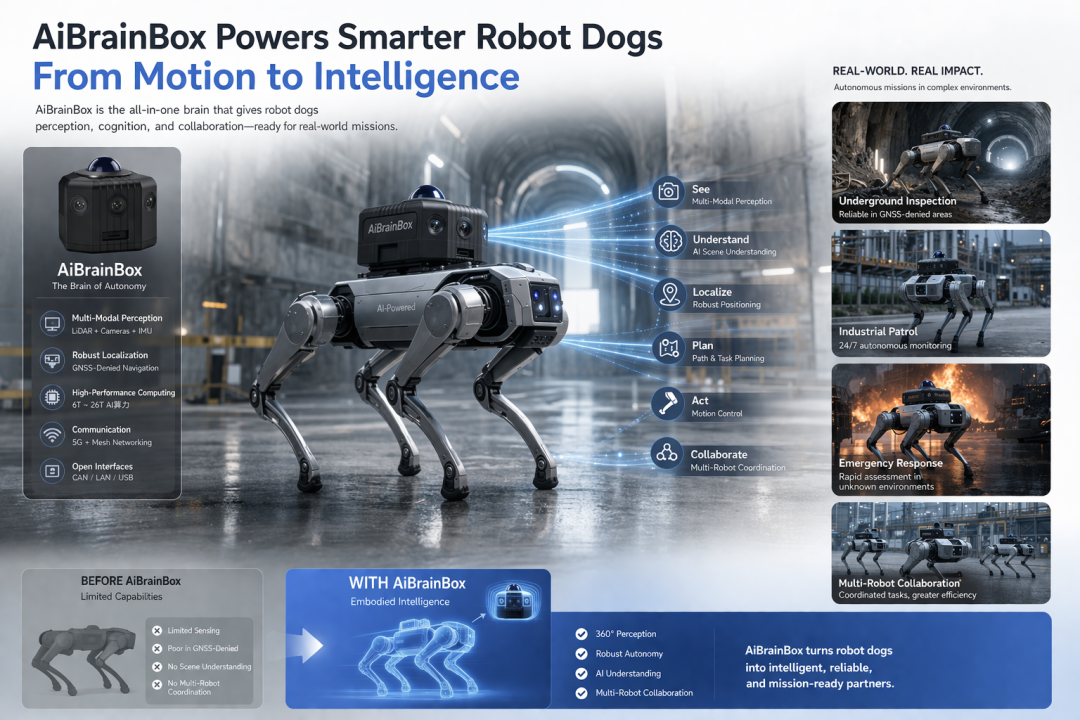
机器人行业的智能中枢
Robot Brain