在数字孪生与三维建模项目中,无人机倾斜摄影和全景相机是最常用的数据采集方式。但很多项目建模效果不理想,问题往往不在建模,而在采集阶段。本文结合实战经验,详细讲解无人机航飞、全景相机拍摄及数据采集规范,帮助你从源头提升三维重建质量,少走弯路。
一、无人机
1.首先下载DJI Fly App ,选择型号为DJI Air 3,把里面的基础教程都看一遍。
这些教程比较干,看完会清楚飞机、飞机电池仓的基础操作和注意事项。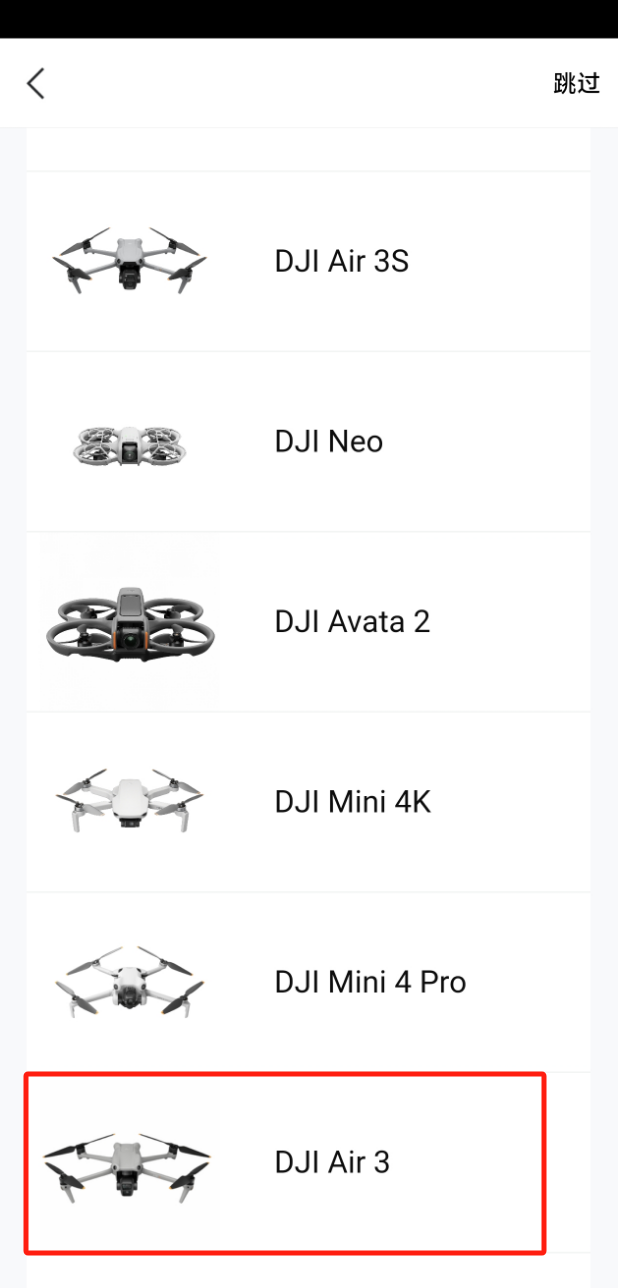
2.看完基础教程就建议去实践一下,不用飞太远,把教程里讲的内容都操作一遍即可。
这里要注意无人机的其中两条腿是向上掰开(如图),另外两条是向两侧掰开。
切忌用蛮力,否则时间长了容易产生缝隙 
3.实际体验飞行的过程中我认为唯一需要注意的:
可以把手放在这个按钮(如下图)上,一键紧急刹车,防止飞机撞到障碍物。
4.通过了以上三步,大家基础航飞,拍拍风景照片就没问题了。接下来就是倾斜摄影建模拍摄的技巧:
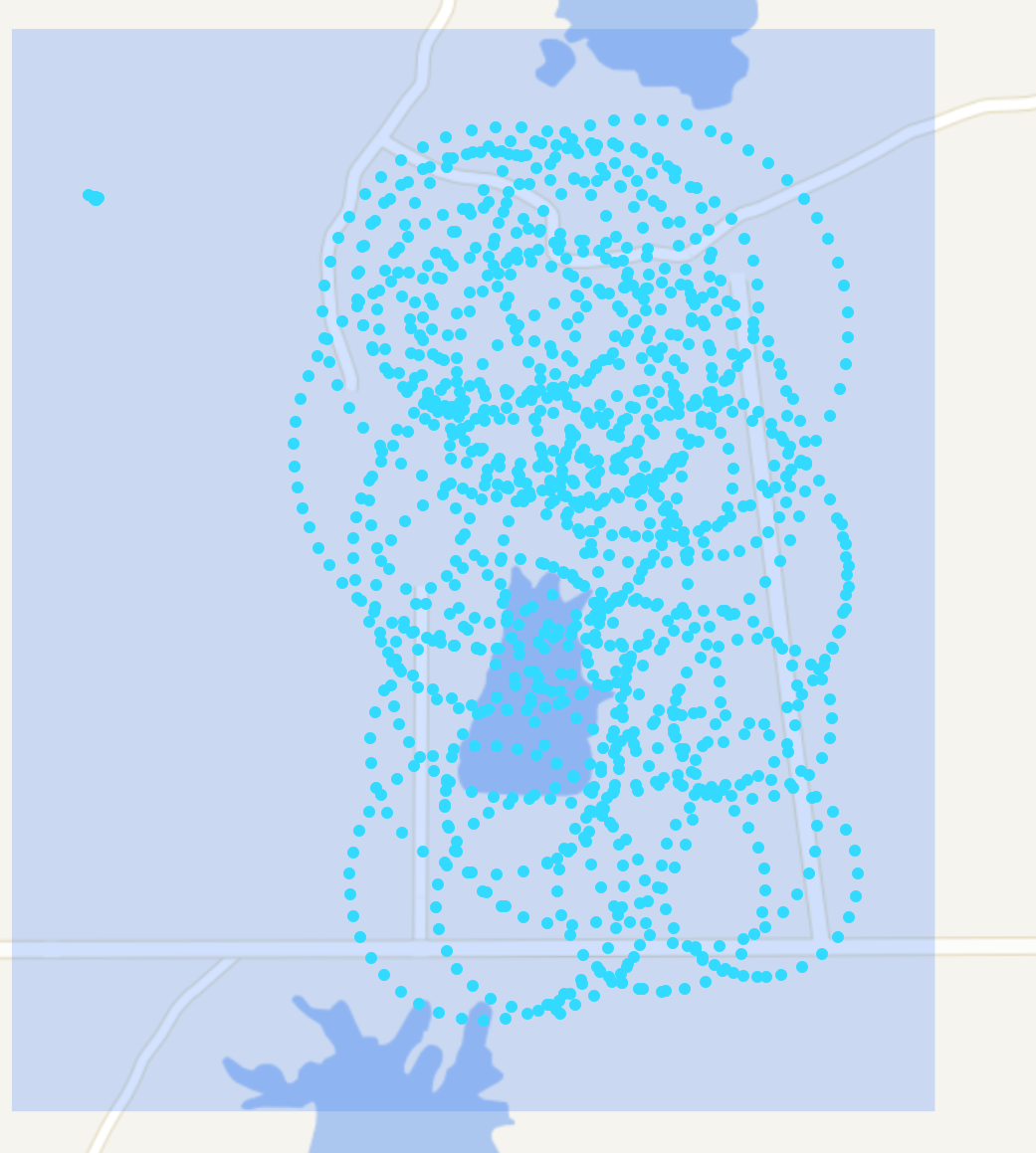
- 主要是飞机自带的环绕飞行功能(如图1)间隔约3秒进行拍摄。最终产出的是图片,不要录视频。
- 标蓝圈是飞机环绕速度,建议拉到中等偏上。且始终保持顺时针/逆时针一个方向环绕。如果飞机快没电了,或者受即将到来的恶劣天气影响,则可以把速度拉到顶。
倾斜摄影最适合的天气
是多云+无风。下雨天不要飞,天气炎热建议持续飞行时长不要超过25分钟。

图1
环绕倾斜、间隔几秒拍照
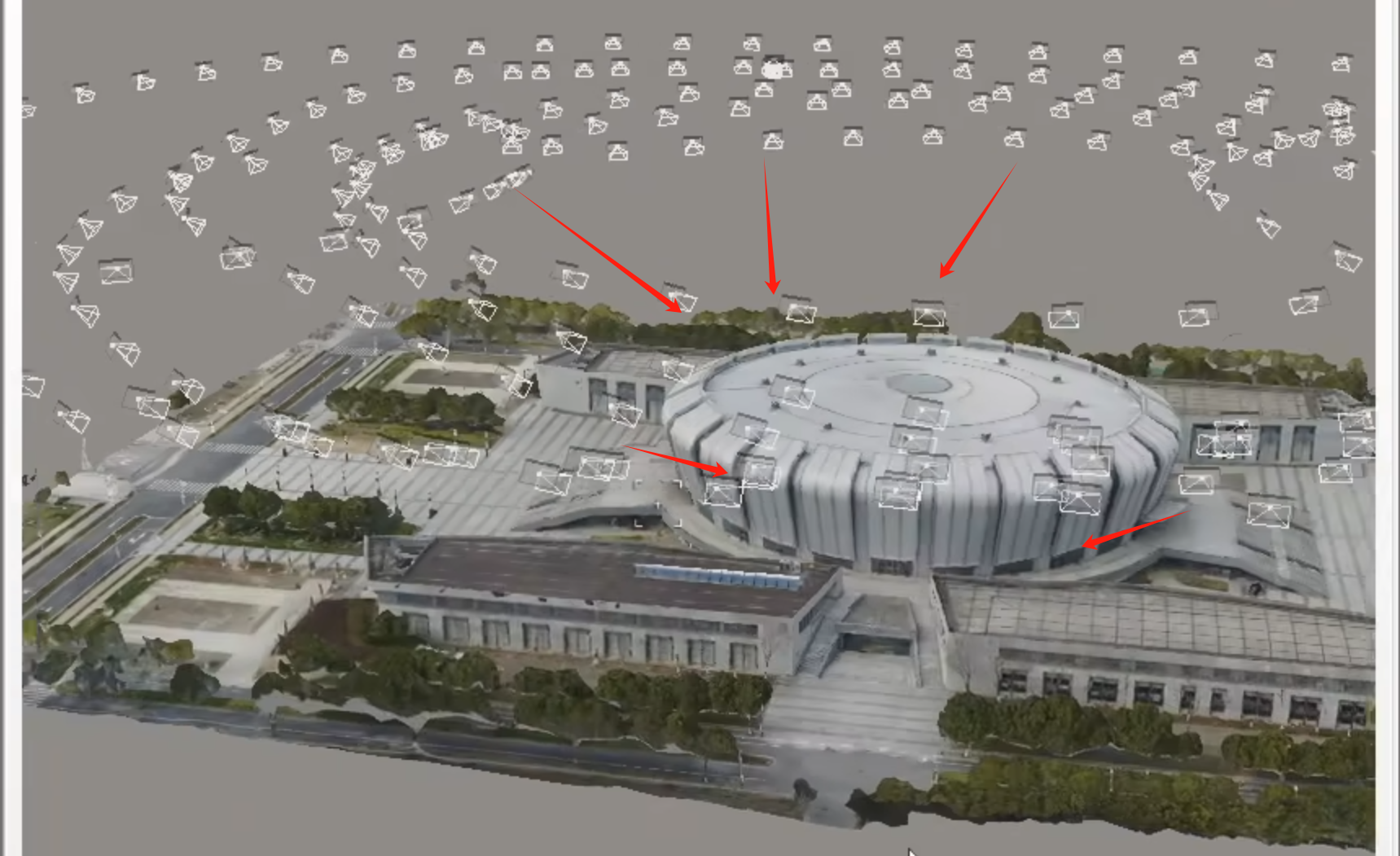
某项目相机点位图
5.再次进行试飞,拍摄小范围的内容,做模型生成测试。
注意事项
1、避免在室外温度大于35度的情况下飞行,需要在早上太阳不大或者傍晚太阳快落的时候飞行。避免高温时段飞行
2、单次飞行小于10分钟,不可超过10分钟,降落时检查电机是否烫手,二次飞行需要等电机电池冷却了再飞行
3、飞行前,确保电池温度不过高(避免阳光直射),保持电池70%电量
4、高温天使用平稳模式,校准IMU
恭喜各位,到这里你已经掌握了所有的航飞技巧!快带上心爱的飞机,来一场酣畅淋漓的出差之旅吧!
二、全景相机
全景相机操作相对比较简单,这里贴一个教程:
Insta360 ONE X2基础教程
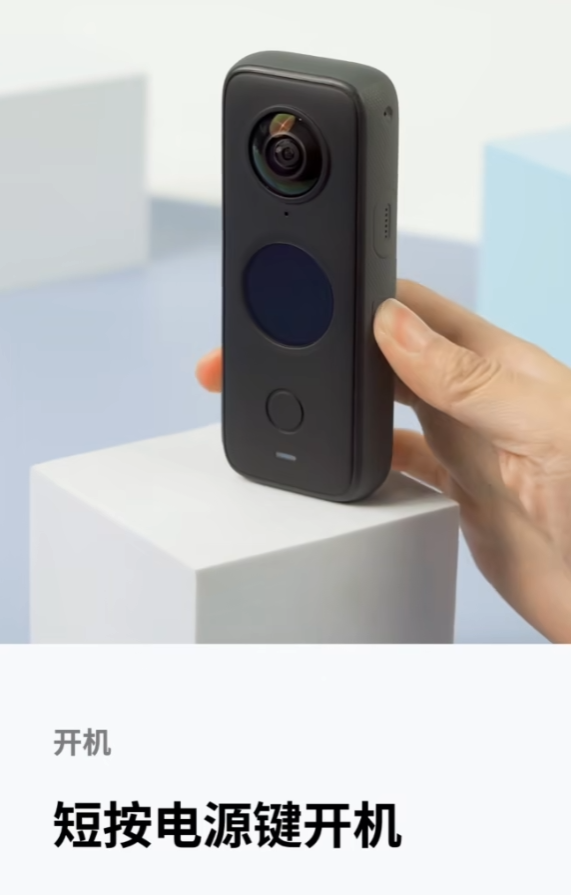
1.短按开机
2.按钮说明:

3.滑动菜单说明:

4.一般选择录像模式下的"标准录像"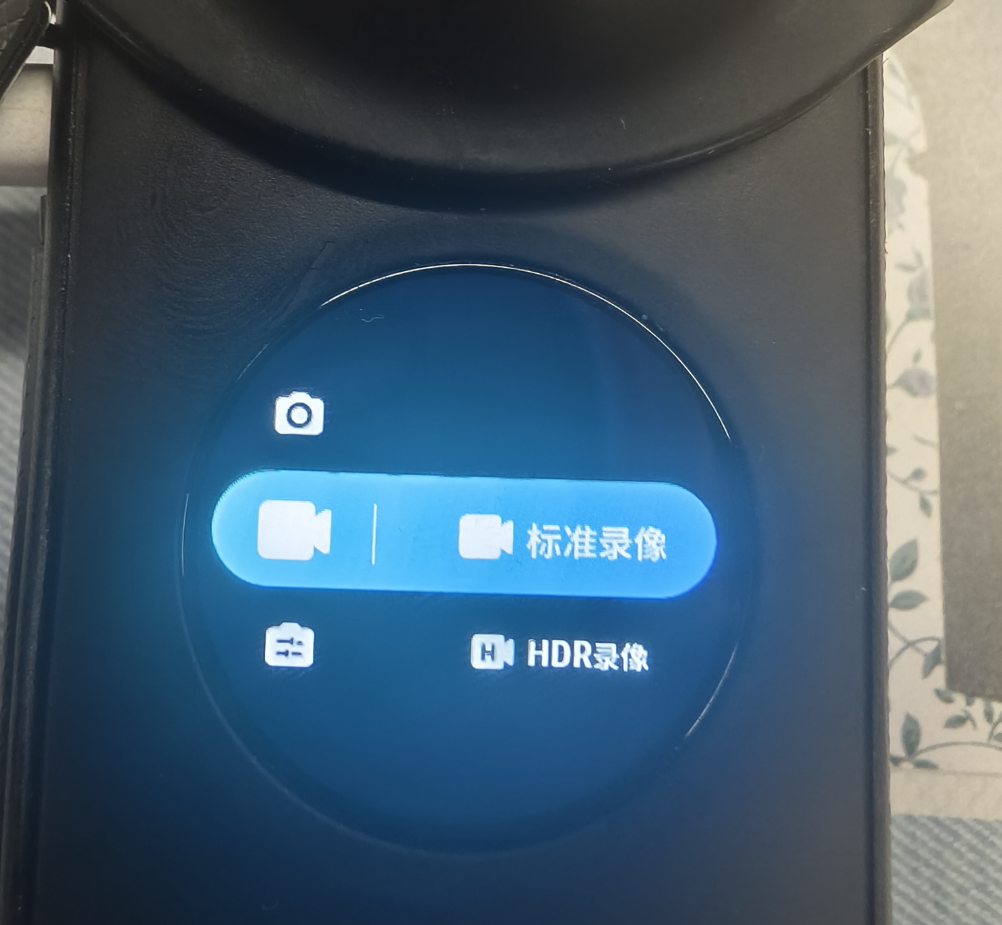
注意界面是 360,拍出来才是全景
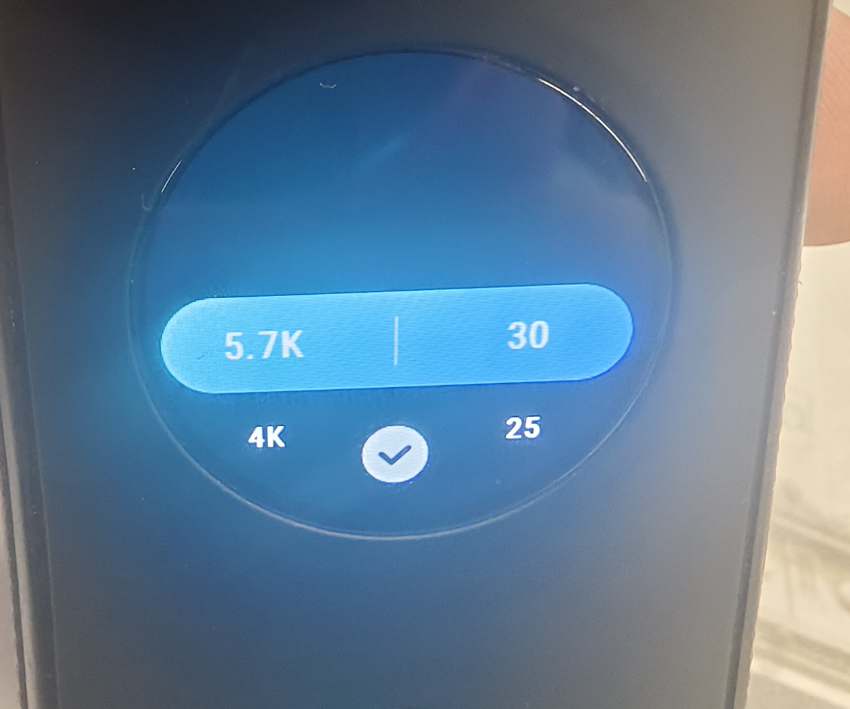
分辨率注意事项
- 分辨率有以下几种类型:
- 5.7K分辨率是:5760x2880
- 4K分辨率是:3840x1920
- 3K分辨率是:3008x1504
需细致建模一般选择5.7K,30帧/秒。
常规建模选择4K,30帧/秒即可
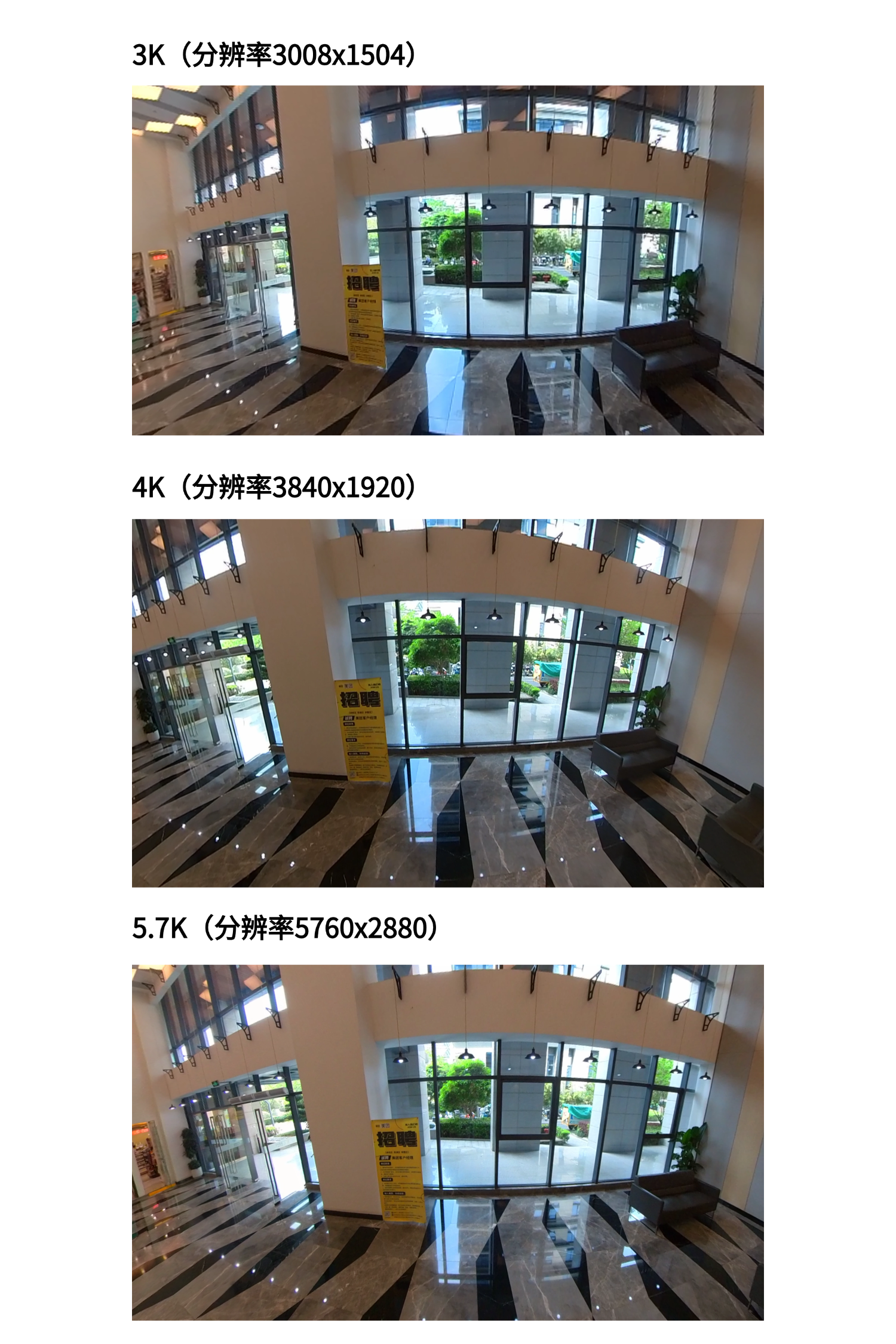
6.下面是不同分辨率 同一角度拍摄画面的截图对比:
(图片上传有限,仅做示意性对比)
恭喜各位,到这里你已经掌握了所有的拍摄技巧!快带上心爱的相机,来一场酣畅淋漓的出差之旅吧!
三、全景相机文件重命名注意事项
如下图所示,红框+蓝框名称都一样的 则为同一组全景视频文件。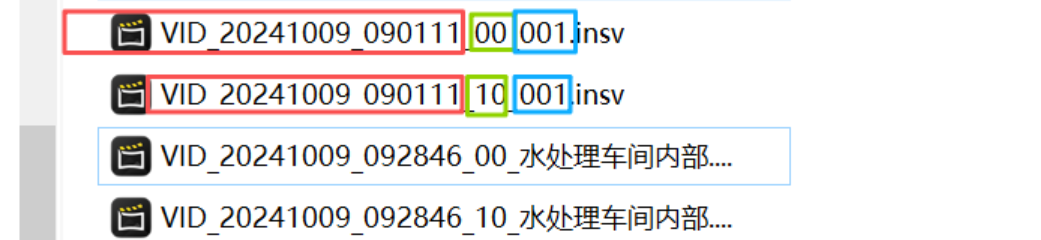
- 红框内是拍摄日期,不能更改。否则Insta360 Studio打开是黑屏无法播放。
- 绿框内表示前后两个摄像头文件,不能更改。否则Insta360 Studio打开只有一半,不是全景。
- 蓝框内是文件名称,可以更改。如后两个文件所示,通过中文重命名帮助技术人员快速知晓视频内容,同时不影响视频播放。
到这里,无人机航飞与全景相机采集的核心要点基本就覆盖完了。实际项目中,设备操作本身并不复杂,难点在于是否理解什么样的数据才是建模真正需要的。当采集流程规范、数据质量稳定之后,后续的三维重建和数字孪生应用会顺畅很多。如果你是刚开始接触这一块,建议多做几次小范围测试,从能完成拍摄逐步过渡到输出可用数据。