Gitee代码地址
https://gitee.com/orbbecdeveloper
github地址
上面两个官方驱动,astra pro都用不了
# 安装ubuntu
Ubuntu20.0.6版本
ubuntu-20.04.6-desktop-amd64.iso
下载地址
https://repo.huaweicloud.com/ubuntu-releases/20.04.6
安装在虚拟机中
VMware® Workstation 16 Pro
16.1.0 build-17198959
# 安装ros(手动方式)
对应版本:
Ubuntu 20.04 (Focal Fossa) - 2020年4月发布
对应的ROS版本:ROS Noetic (2020年5月发布)
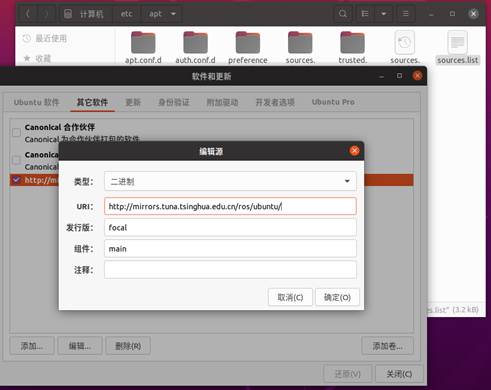
## 配置国内源(加快下载速度):
方式一:
方式二:
```
# 1. 设置源
sudo sh -c 'echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ focal main" > /etc/apt/sources.list.d/ros-latest.list'
# 2. 添加ROS仓库密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 3. 更新软件包列表(这步会尝试连接镜像站)
sudo apt update```
额外提示:
```
1、备份配置文件:
sudo cp -a /etc/apt/sources.list /etc/apt/sources.list.bak
2、恢复配置文件
sudo cp /etc/apt/sources.list.bak /etc/apt/sources.list
```
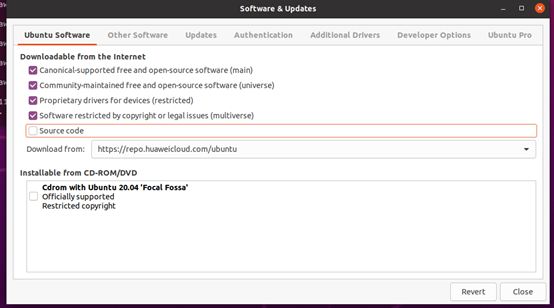
方式三:(推荐)
服务器选择China下的华为云服务器
## 安装ros
参考:https://chat.baidu.com/search/10591486914319518450?enter_type=sidebar_dialog
# 安装ROS Noetic桌面完整版
sudo apt-get install ros-noetic-desktop-full
环境设置
### 每次打开新终端时自动加载 ROS 环境变量:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
### 初始化rosdep
sudo apt install python3-rosdep2
rosdep init
rosdep update
### 构建工作空间依赖
安装构建 ROS 包所需的工具
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo apt install python3-roslaunch(可省略)
sudo apt install ros-noetic-ros-core
## 启动小海龟
启动运行小海龟例子
1.第一个终端运行如下命令
roscore
2.打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
sudo apt install ros-noetic-turtlesim
rosrun turtlesim turtlesim_node
3.如果希望小海龟能够移动,打开第三个终端,利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key
一键安装(鱼香肉丝)
wget http://fishros.com/install -O fishros && . fishros
# 安装相机驱动
## 创建ROS工作空间
创建标准工作空间结构
mkdir -p ~/ros_ws/src
cd ~/ros_ws
catkin_make
2.2 设置环境变量 设置环境变量
echo "source ~/ros_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
## 安装相机驱动 方式一
3.1 下载驱动源码
cd ~/ros_ws/src
git clone https://github.com/orbbec/ros_astra_camera.git
3.2 安装依赖包
安装backward_ros依赖
sudo apt-get install ros-noetic-backward-ros
安装其他可能的依赖
sudo apt-get install ros-noetic-camera-info-manager
#(出现abort终止就再试一次)
sudo apt-get install ros-noetic-image-transport
#(好像没起作用)
安装 ROS Noetic 版本的 dynamic_reconfigure 包
sudo apt install ros-noetic-tf2-ros
sudo apt install ros-noetic-dynamic-reconfigure
3.3 编译驱动
cd ~/ros_ws
catkin_make
# Orb-slam2
## 原版安装(稀疏建图)
git clone https://github.com/raulmur/ORB_SLAM2.git
## 高博版(稠密建图)
### Slam2稠密建图
Ubuntu20.04下ORB-SLAM2稠密建图+octomap生成八叉树地图(上)
https://blog.csdn.net/qq_45509667/article/details/138628381
Ubuntu20.04下ORB-SLAM2稠密建图+octomap生成八叉树地图(下)