摘要:T-BOX已发展为集成远程诊断与运行监控的关键节点,形成"感知-传输-决策-反馈"闭环架构。运行监控通过CANFD/Ethernet总线采集数据,采用MQTT异步传输至云端进行大数据分析;远程诊断通过UDSoverIP实现交互式控制。开发需集成DoIP、UDS等标准协议,并重视安全机制与合规性。针对时序同步问题,需部署gPTP协议;为满足功能安全要求,应增强边缘计算能力。以动力电池预警为例,展示了从数据采集、边缘决策到远程介入的完整技术实现路径。
T-BOX(Telematics Box)作为车载系统与云端互联的物理层边界,已从单纯的通信网关演进为集成远程诊断(Remote Diagnostics)与运行监控(Operational Monitoring)的核心算力节点。
一、 业务流程架构:端到端闭环逻辑
远程诊断与监控构成了一套典型的**"感知-传输-决策-反馈"**闭环架构。
1. 运行监控流(流式数据处理)
-
采集层(Data Acquisition): T-BOX 通过 CAN FD/Ethernet 总线,利用 SOME/IP 或信号基通讯周期性轮询(Polling)或订阅(Subscribe)各控制单元(ECU)信号。
-
预处理(Edge Processing): 执行数据脱敏与流式压缩。采用 Delta Encoding 或高效二进制序列化方案降低有效载荷。
-
传输层(Inbound/Outbound): 基于 MQTT 异步消息机制,通过 LTE/5G 链路将数据上报至车联网服务平台(TSP)。
-
应用层(Big Data Analysis): 平台侧进行多维数据聚合,触发故障分类预警或生成驾驶行为模型(UBI)。
2. 远程诊断流(交互式控制)
-
指令下发: TSP 发起基于 UDS over IP (DoIP) 的诊断请求。
-
协议转换(Gateway/Router): T-BOX 扮演应用层网关,执行 IP-to-Bus 协议转换,将以太网帧解析为总线诊断报文。
-
执行回传: 通过 ISO 14229 (UDS) 标准读取 DTC(故障码) 或 Freeze Frame(冻结帧),实现故障现场的数据快照回传。
二、 软件开发核心模块与协议映射
在基于 Linux/QNX 的中间件开发中,需深度集成以下标准化协议:
| 模块 | 技术实现 / 协议映射 | 关键物理量与规范 |
|---|---|---|
| 通信栈 | DoIP / ISO 13400 ; UDS / ISO 14229 | 传输层:TCP/UDP 端口 13400 |
| 序列化 | Google Protobuf ; ASN.1 | 压缩率提升 > 40% (相比 JSON) |
| 配置解析 | AUTOSAR ARXML ; DBC | 信号偏移量、缩放因子(Scaling) |
| 安全机制 | TLS 1.3 ; SecOC (ISO 21434) | 硬件安全模块 (HSM) 加解密延时 < 10ms |
| 合规性 | 国密 SM2/SM3/SM4 | 符合 GB/T 32960 (电动车监控标准) |
三、 技术闭环分析
-
在分布式车载系统中,若无 gPTP (IEEE 802.1AS) 协议支持,云端解析多路 ECU 信号时会出现逻辑时序错位,导致故障根因分析失效。
-
在自动驾驶场景下,高时延的云端预警无法满足功能安全(Functional Safety)。应补充边缘计算逻辑:T-BOX 侧需具备初步的故障降级决策能力,而非完全依赖平台反馈。
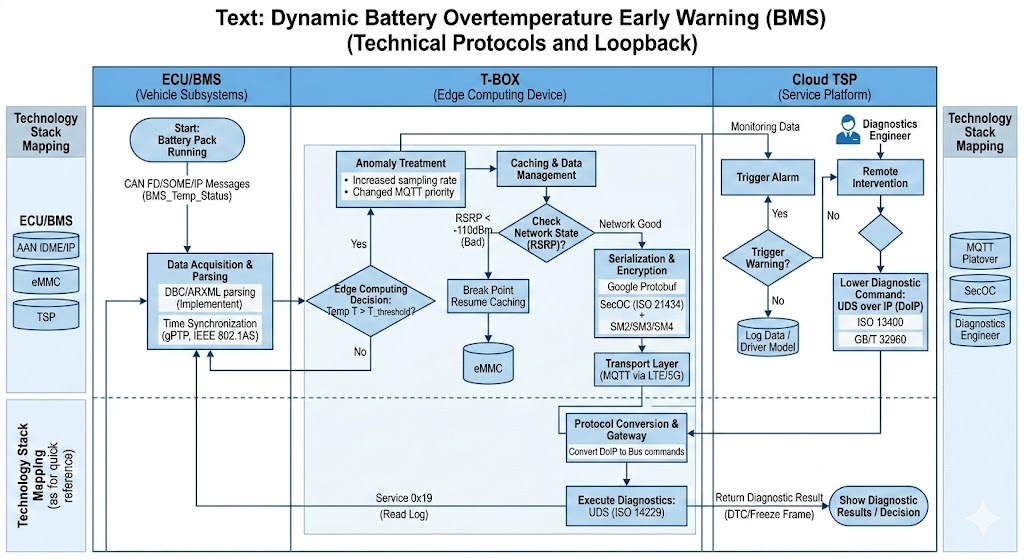
四、 典型开发场景:动力电池超温预警(BMS)
-
嵌入式开发: 在 T-BOX 通信域解析 BMS_Temp_Status 报文。
-
边缘决策: 部署异常检测算子。若温度 T \> T_{threshold},立即提升采样频率并更改 MQTT 主题优先级。
-
断点续传: 若 5G 信号强度(RSRP)低于 -110dBm,数据进入 eMMC 环形缓冲区挂起,待链路恢复后执行重传机制。
-
远程介入: 后台检测到预警后,通过 Service 0x19 (UDS) 读取详细运行日志,判断是否触发电池热失控预警。