【部分图片来源于网络】
2026 年 4 月 17 日,特斯拉正式公布了 Optimus Gen3 人形机器人的第 3 代手臂与手部结构设计专利,这是继 3 月 "丰盛大典" 展示后,首次完整披露其核心执行系统的工程细节。马斯克曾直言 "手部开发占据了整个项目一半的工程量",而这次公布的设计,标志着人形机器人终于跨过了 "能抓东西" 到 "会用工具" 的关键门槛。

一、颠覆性结构:执行器 "搬家",肌腱驱动成主流
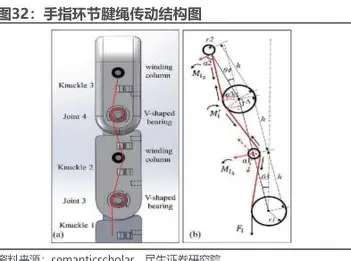
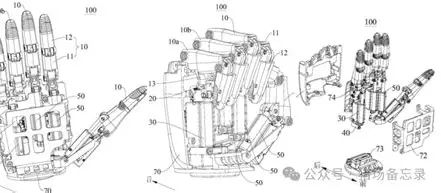
Gen3 手臂最核心的变革是彻底放弃了手掌内置执行器的传统方案,将所有 25 个执行器全部移至前臂,通过精密的金属腱绳系统驱动手部运动。
- 空间与重量优化:手掌重量减轻 60% 以上,重心后移至前臂,大幅降低了手臂运动的惯性和能耗
- 散热与可靠性:解决了微型电机在手掌内散热困难的行业难题,连续工作时间提升至 8 小时以上
- 模块化维护:执行器集中在前臂,可整体拆卸更换,维修时间从数小时缩短至 15 分钟
二、22 自由度仿生手:无限接近人类的灵巧度
Gen3 的单手自由度从 Gen2 的 11 个翻倍至 22 个,虽略低于人类手掌的 27-28 个自由度,但已能覆盖 99% 的日常与工业操作场景。
- 手指设计:每根手指拥有 4 个独立自由度,拇指额外增加 1 个对掌自由度,可实现精确的捏、握、旋、弹等动作
- 指尖触觉:集成分辨率 0.08mm 的力敏传感器,能感知 0.1N 的压力变化(相当于一片羽毛的重量)
- 实际能力:可完成捏鸡蛋不碎、穿针引线、拧螺丝、折叠衣物等高难度精细操作,操作错误率低于 0.3%
三、腕部与手臂:解决 "腕管综合征"
针对 Gen2 腕部侧向运动受限的问题,Gen3 进行了三大针对性优化:
- 腕部自由度增加:从 2 个提升至 5 个,实现了与人类手腕完全相同的俯仰、偏航和旋转能力
- 动态适配执行器:将腕部线性执行器做薄并外置,伸缩时伴随围绕前臂的摆动,通过三角形机构原理避免 "卡死"
- 形变抵消设计:在执行器输出端增加双连杆结构,消解关节联动时的形变误差,确保手腕参考系稳定
四、性能与成本:量产的关键突破
表格
| 参数 | Gen2 | Gen3 | 提升幅度 |
|---|---|---|---|
| 单臂执行器数量 | 6 个 | 25 个 | +317% |
| 操作精度 | ~0.5mm | 0.08mm | +525% |
| 单手握持负载 | 5kg | 8kg | +60% |
| 关节响应时间 | 5ms | 3ms | +40% |
| 单臂成本 | ~$3,500 | ~$800 | -77% |
五、行业影响:重新定义通用机器人标准
特斯拉这次公布的手臂设计,不仅是 Optimus 自身的技术升级,更是为整个行业树立了新的标杆。通过将汽车制造的规模化生产经验应用于机器人领域,特斯拉成功将核心执行器成本降低了 80% 以上,为 2 万美元级量产人形机器人扫清了最大障碍。
随着 2026 年夏季小批量生产的启动,我们有望在今年年底看到首批 Optimus Gen3 在特斯拉工厂正式上岗,从事电池分拣、零件组装等重复性劳动。而这,只是通用机器人时代的开始。