随着康复医疗与人体增强技术的飞速发展,高端意念驱动外骨骼机器人已成为精准运动辅助与功能代偿的核心装备。其关节电机驱动与精密电源管理系统作为整机"神经与肌腱",需为无刷伺服电机、高精度传感器、脑电/肌电信号采集模块等关键单元提供高效、瞬态响应优异的电能转换与分配,而功率 MOSFET 的选型直接决定了系统的动态性能、控制精度、功率密度及长期可靠性。本文针对外骨骼对高扭矩密度、低延迟响应、安全冗余及紧凑结构的严苛要求,以场景化适配为核心,重构功率 MOSFET 选型逻辑,提供一套可直接落地的优化方案。
一、核心选型原则与场景适配逻辑
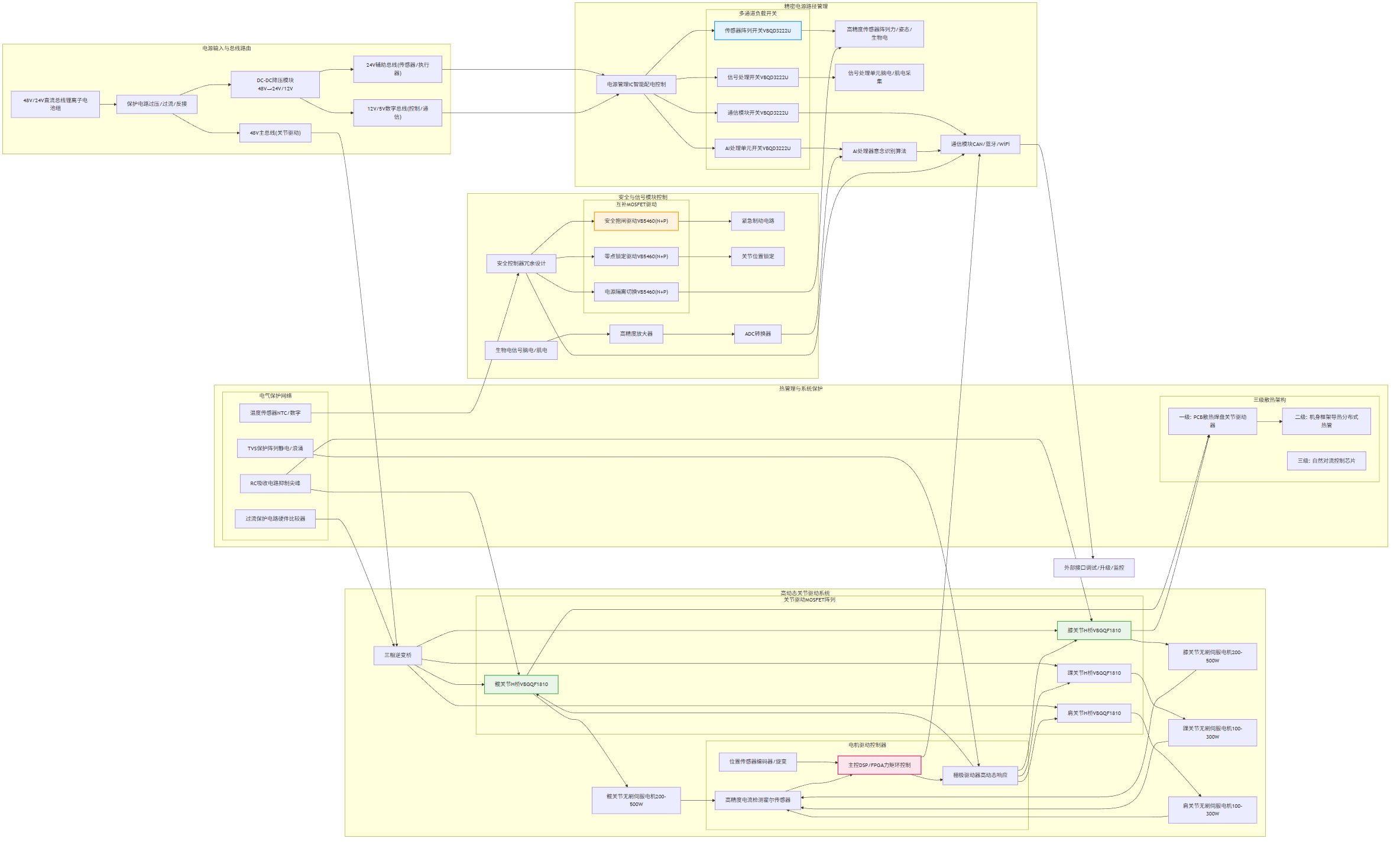
图1: 高端意念驱动外骨骼机器人方案与适用功率器件型号分析推荐VBQD3222U与VB5460与VBGQF1810与产品应用拓扑图_01_total
选型核心原则
电压与动态响应并重:针对 24V/48V 高压总线及低压数字/模拟电路,MOSFET 需具备充足耐压裕量,同时关注低栅极电荷与低导通电阻以实现高速开关。
极致低损耗与热管理:优先选择超低 Rds(on) 与优化封装热阻的器件,最大限度降低关节驱动器的传导与开关损耗,控制温升。
高集成度与空间适配:根据多关节分布式驱动与集中供电架构,灵活选用单路、双路及互补型封装,提升系统集成度。
安全与可靠性冗余:满足人体辅助设备的安全标准,器件需具备优异的抗冲击、抗干扰能力,并支持故障隔离与降额设计。
场景适配逻辑
按外骨骼机器人核心功能链,将 MOSFET 分为三大应用场景:无刷伺服关节驱动(动力执行)、精密电源路径管理(能量分配)、安全与信号模块控制(系统保障),针对性匹配器件参数与拓扑。
二、分场景 MOSFET 选型方案
场景 1:无刷伺服关节驱动(200W-500W)------ 动力执行器件
推荐型号:VBGQF1810(N-MOS,80V,51A,DFN8(3x3))
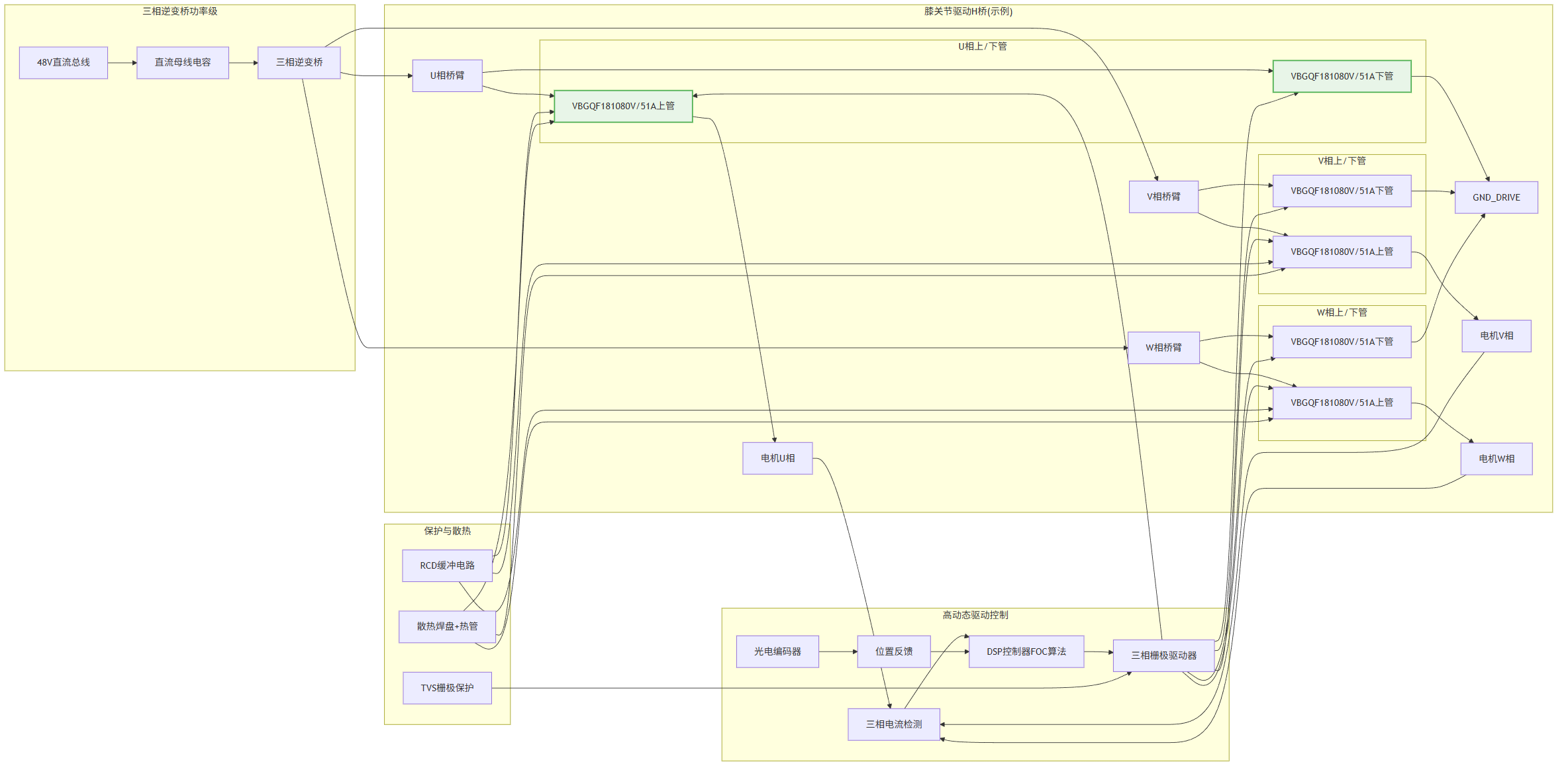
图2: 高端意念驱动外骨骼机器人方案与适用功率器件型号分析推荐VBQD3222U与VB5460与VBGQF1810与产品应用拓扑图_02_joint
关键参数优势:采用先进 SGT 技术,10V 驱动下 Rds(on) 低至 9.5mΩ,51A 连续电流轻松应对 48V 总线下电机启停与峰值扭矩输出。1.7V 低阈值电压利于驱动。
场景适配价值:DFN8 封装兼具优异散热与低寄生电感,是实现高频 PWM 和低开关损耗的关键,保障关节运动的高动态响应与平滑控制。高效率转换直接提升系统续航与扭矩密度。
适用场景:髋、膝关节等高功率无刷伺服电机逆变桥驱动,支持高带宽力矩环控制。
场景 2:精密电源路径管理 ------ 能量分配器件
推荐型号:VBQD3222U(Dual N+N,20V,6A per Ch,DFN8(3x2)-B)
关键参数优势:双通道 N沟道设计,4.5V驱动下 Rds(on) 仅22mΩ,极低的导通压降。20V耐压完美适配12V/24V中间总线。低至0.5-1.5V的阈值电压可由低压MCU或电源管理IC直接驱动。
场景适配价值:双路独立开关可实现传感器阵列、数据处理单元、通信模块的独立上电时序管理与动态功耗控制。超低导通损耗减少分布式电源节点的能量损失,提升整体能效。
适用场景:多路负载智能配电、DC-DC转换器同步整流、高边/低边负载开关。
场景 3:安全与信号模块控制 ------ 系统保障器件
推荐型号:VB5460(Dual N+P,±40V,8A/-4A,SOT23-6)
关键参数优势:SOT23-6微型封装内集成互补型N沟道与P沟道MOSFET,构成理想的电平转换或H桥小功率驱动单元。40V耐压提供充足裕量。
场景适配价值:互补对管可高效用于安全抱闸继电器驱动、关节零点位置锁定电机控制、或生物电信号采集模块的电源隔离切换。集成化设计节省空间,提升控制回路可靠性。
适用场景:安全互锁装置驱动、低功耗H桥电路、精密模拟电路电源切换。
三、系统级设计实施要点
驱动电路设计
VBGQF1810:必须搭配高性能栅极驱动IC,提供足够峰值电流以实现快速开关,优化门极电阻以平衡开关速度与EMI。
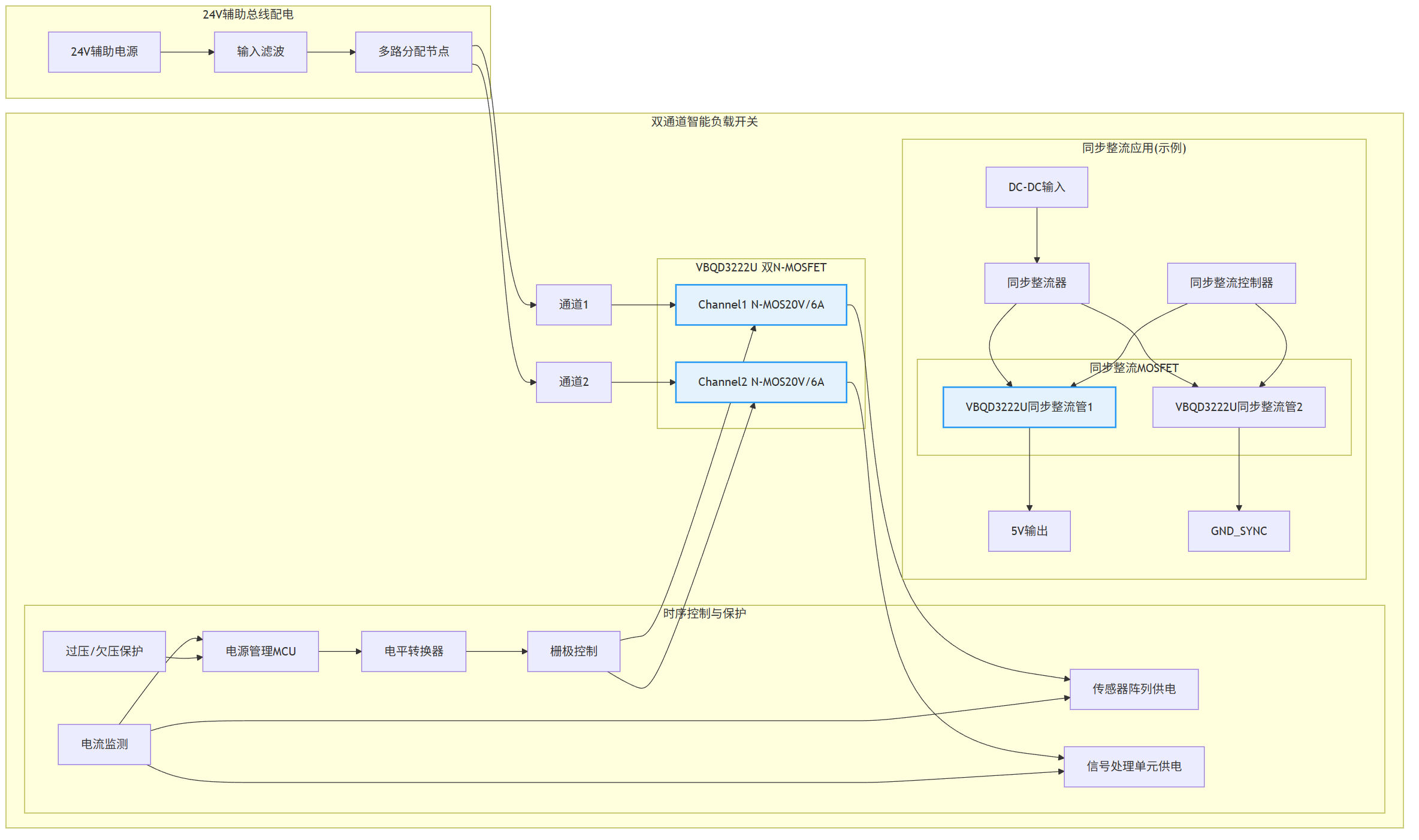
图3: 高端意念驱动外骨骼机器人方案与适用功率器件型号分析推荐VBQD3222U与VB5460与VBGQF1810与产品应用拓扑图_03_power
VBQD3222U:可由低压数字电源直接驱动,建议每路栅极增加RC滤波以提高抗干扰能力。
VB5460:需注意N管与P管的驱动逻辑互补性,可采用专用预驱或逻辑电路控制,防止共通。
热管理设计
分级散热策略:VBGQF1810关节驱动器需采用大面积PCB散热焊盘并考虑导热至机身框架;VBQD3222U与VB5460依靠封装和局部敷铜即可满足散热。
降额设计标准:关节驱动MOSFET持续电流按额定值60%设计,以应对频繁启停与堵转冲击;环境温度40℃时结温预留15℃以上裕量。
EMC与可靠性保障
EMI抑制:VBGQF1810功率回路采用最小化布局,并联肖特基二极管或RC吸收电路以抑制电压尖峰。
保护措施:所有电机驱动回路集成高精度电流采样与硬件过流保护;关键信号与电源路径MOSFET栅极配置TVS管,抵御静电及电源浪涌。
四、方案核心价值与优化建议
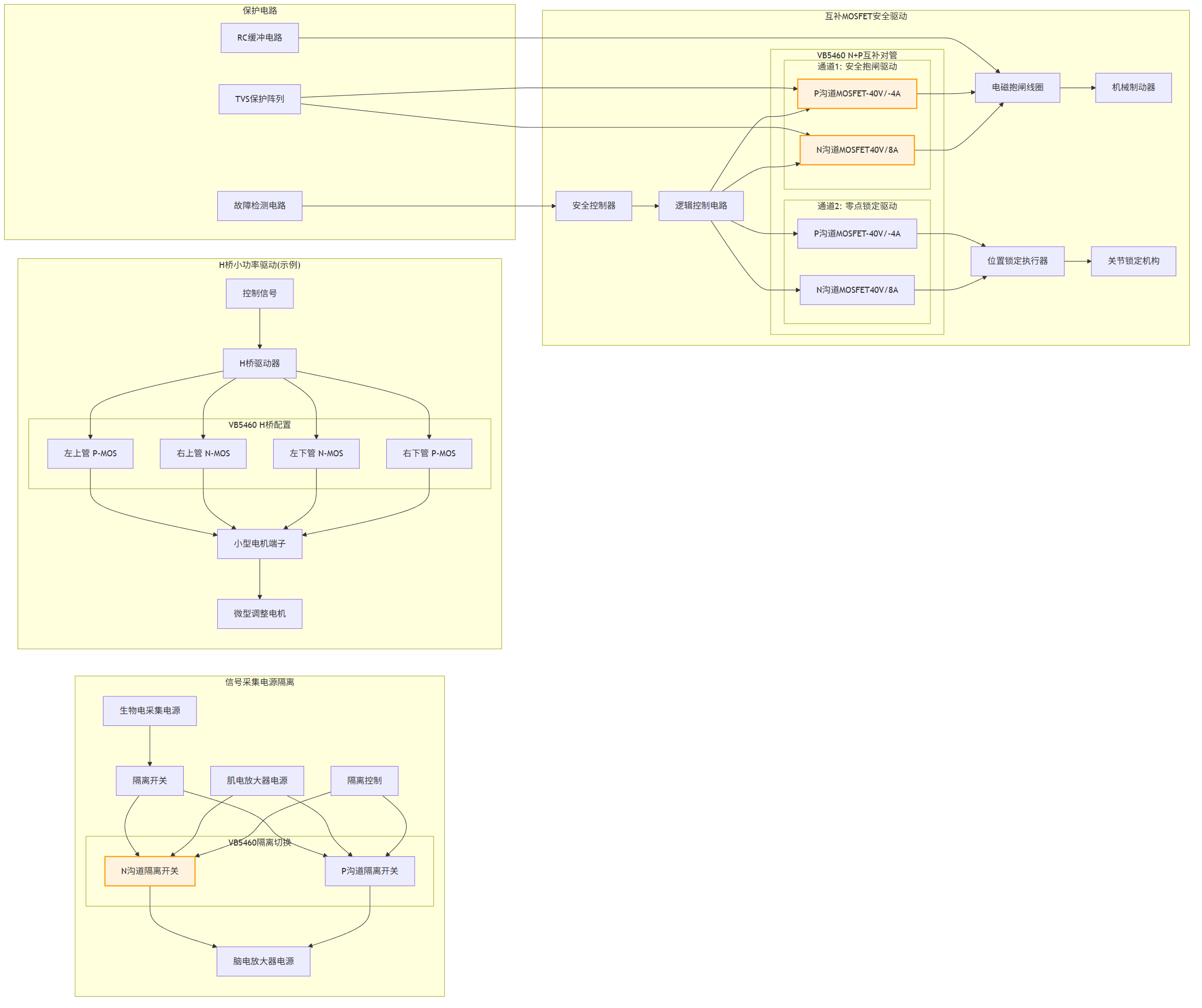
图4: 高端意念驱动外骨骼机器人方案与适用功率器件型号分析推荐VBQD3222U与VB5460与VBGQF1810与产品应用拓扑图_04_safety
本文提出的高端意念驱动外骨骼机器人功率MOSFET选型方案,基于场景化适配逻辑,实现了从高动态关节驱动到精密能量分配、从核心执行到安全保障的全链路覆盖,其核心价值主要体现在以下三个方面:
-
高动态与高能效统一:通过为关节驱动选择SGT技术超低损耗MOSFET,显著降低了伺服驱动器的开关与传导损耗,提升了系统带宽与响应速度,同时将更多电能用于有效机械输出,整体驱动效率预计可达96%以上,直接延长单次充电工作时间,并降低系统热负荷。
-
安全冗余与智能管理兼顾:互补型MOSFET与双路独立开关的设计,为安全互锁、模块化电源管理提供了硬件基础,实现了功能安全与系统可靠性的提升;微型化封装与低电压驱动特性,为机器人集成更多生物传感器与AI处理单元预留了空间与功耗余量,助力实现更精准的意念识别与自适应控制。
-
高功率密度与高可靠性平衡:所选器件封装先进、热性能优异,在有限空间内实现了大电流处理能力,符合外骨骼轻量化、紧凑化设计趋势;同时,器件具备宽泛的安全工作区与良好的环境耐受性,结合系统级防护,确保在复杂人体运动工况下的长期稳定运行,在追求极致性能的同时保障了用户安全。
在高端意念驱动外骨骼机器人的关节驱动与电源系统设计中,功率MOSFET的选型是实现高动态响应、高精度控制与高安全冗余的核心环节。本文提出的场景化选型方案,通过精准匹配动力执行、能量分配与安全控制的不同需求,结合系统级的驱动、散热与防护设计,为外骨骼机器人研发提供了一套全面、可落地的技术参考。随着外骨骼向更自然的人机交互、更强大的助力效能、更长的续航方向发展,功率器件的选型将更加注重效率、密度与智能控制的融合,未来可进一步探索集成电流传感、温度保护的智能功率模块(IPM)以及宽禁带器件在超高频驱动中的应用,为打造性能卓越、穿戴舒适、安全可靠的下一代智能外骨骼机器人奠定坚实的硬件基础。在科技赋能人类能力的时代,卓越的硬件设计是实现人机深度融合与功能增强的第一道坚实防线。