目录
多普勒频率
当波的接收者和发射源之间存在相对运动时,其接收到的波的频率会发生偏移,偏移后的频率和原频率的差值,就是多普勒频率 f d f_d fd。发射源和接收者互相靠近时,接收到的频率变高, f d > 0 f_d>0 fd>0;发射源和接收者互相远离时,接收到的频率变低, f d < 0 f_d<0 fd<0。
在SAR中,目标回波的信号频率,会因为雷达和目标之间的径向相对速度 v r v_r vr发生偏移,这个偏移量就是多普勒频率 f d f_d fd:
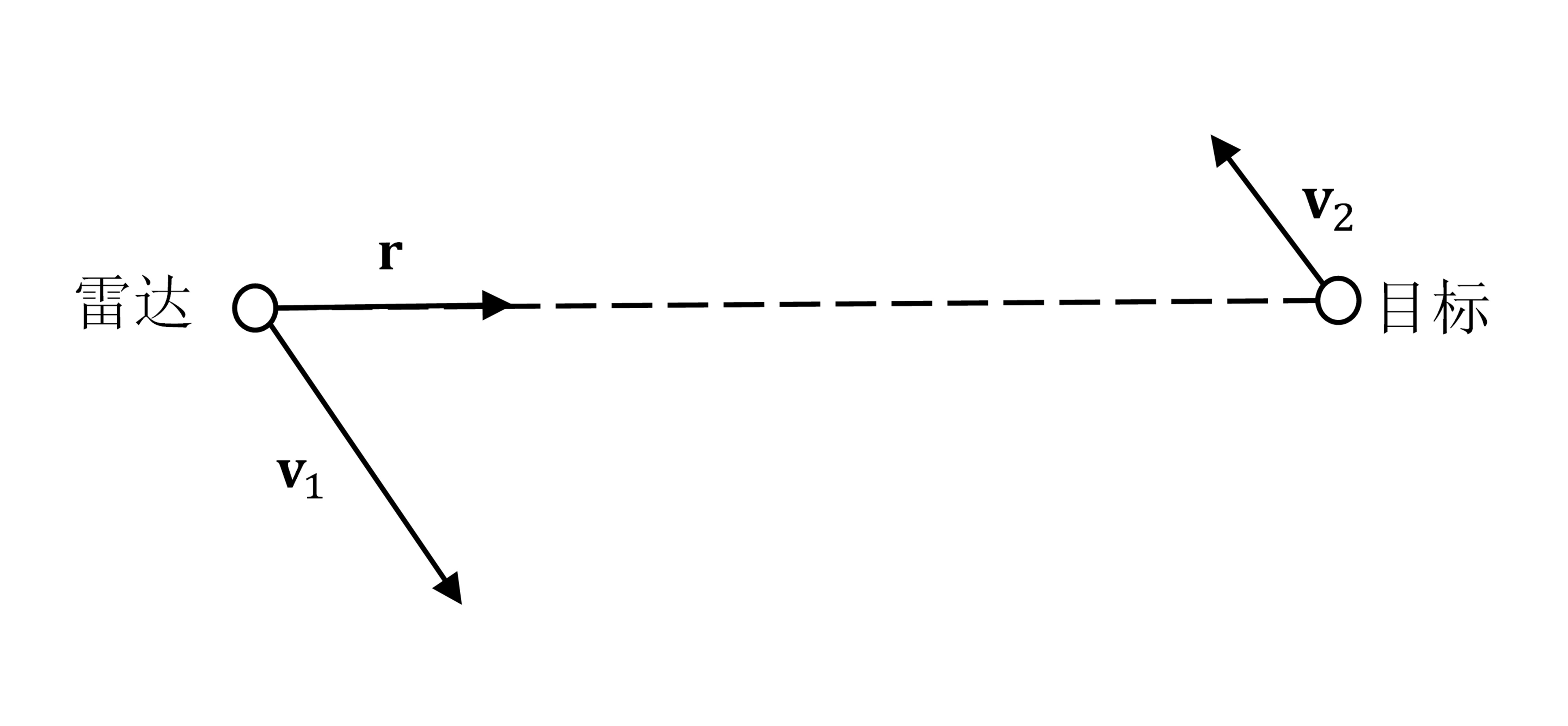
f d = 2 v r λ = 2 ( v 1 − v 2 ) ⋅ r λ f_d=\frac{2v_r}{\lambda}=\frac{2(\mathbf{v}_1-\mathbf{v}_2)\cdot\mathbf{r}}{\lambda} fd=λ2vr=λ2(v1−v2)⋅r其中, v 1 \mathbf{v}_1 v1和 v 2 \mathbf{v}_2 v2分别为雷达和目标的速度矢量, r \mathbf{r} r为雷达指向目标的单位矢量。
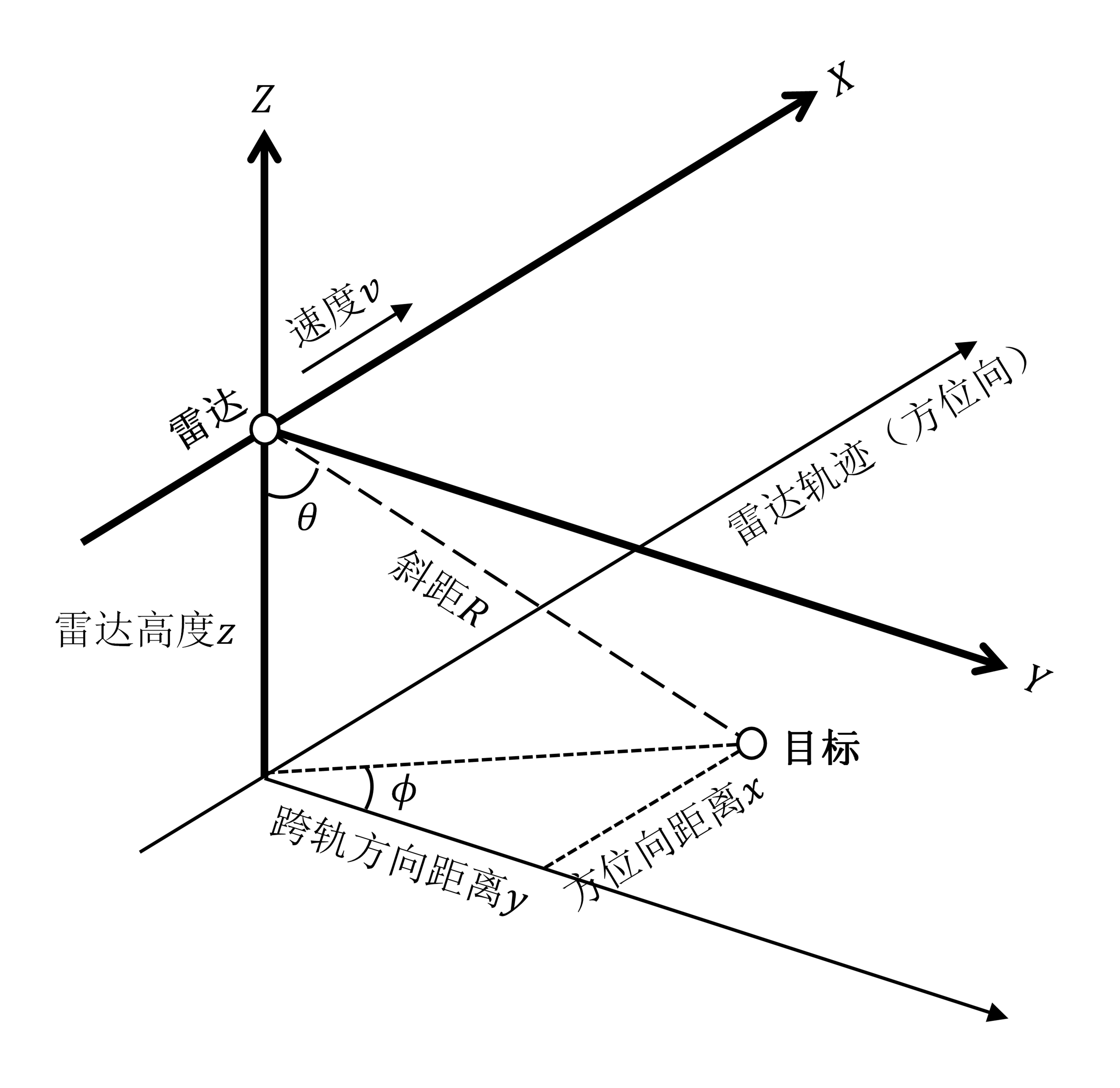
在上图所示空间直角坐标系中, v 1 = ( v , 0 , 0 ) \mathbf{v}_1=(v, 0, 0) v1=(v,0,0), v 2 = ( 0 , 0 , 0 ) \mathbf{v}_2=(0, 0, 0) v2=(0,0,0), r = ( x , y , − z ) R \mathbf{r}=\frac{(x, y, -z)}{R} r=R(x,y,−z),代入 f d f_d fd,得到
f d = 2 v x λ R = 2 v λ s i n θ s i n ϕ f_d=\frac{2vx}{\lambda R}=\frac{2v}{\lambda}\mathrm{sin}\theta \mathrm{sin}\phi fd=λR2vx=λ2vsinθsinϕ可以看到,地面坐标的多普勒频率与目标到雷达的方位向距离 x x x成正比,因此多普勒效应可以用来区分一个波束覆盖区内不同方位向位置的目标。
多普勒中心频率
正侧视
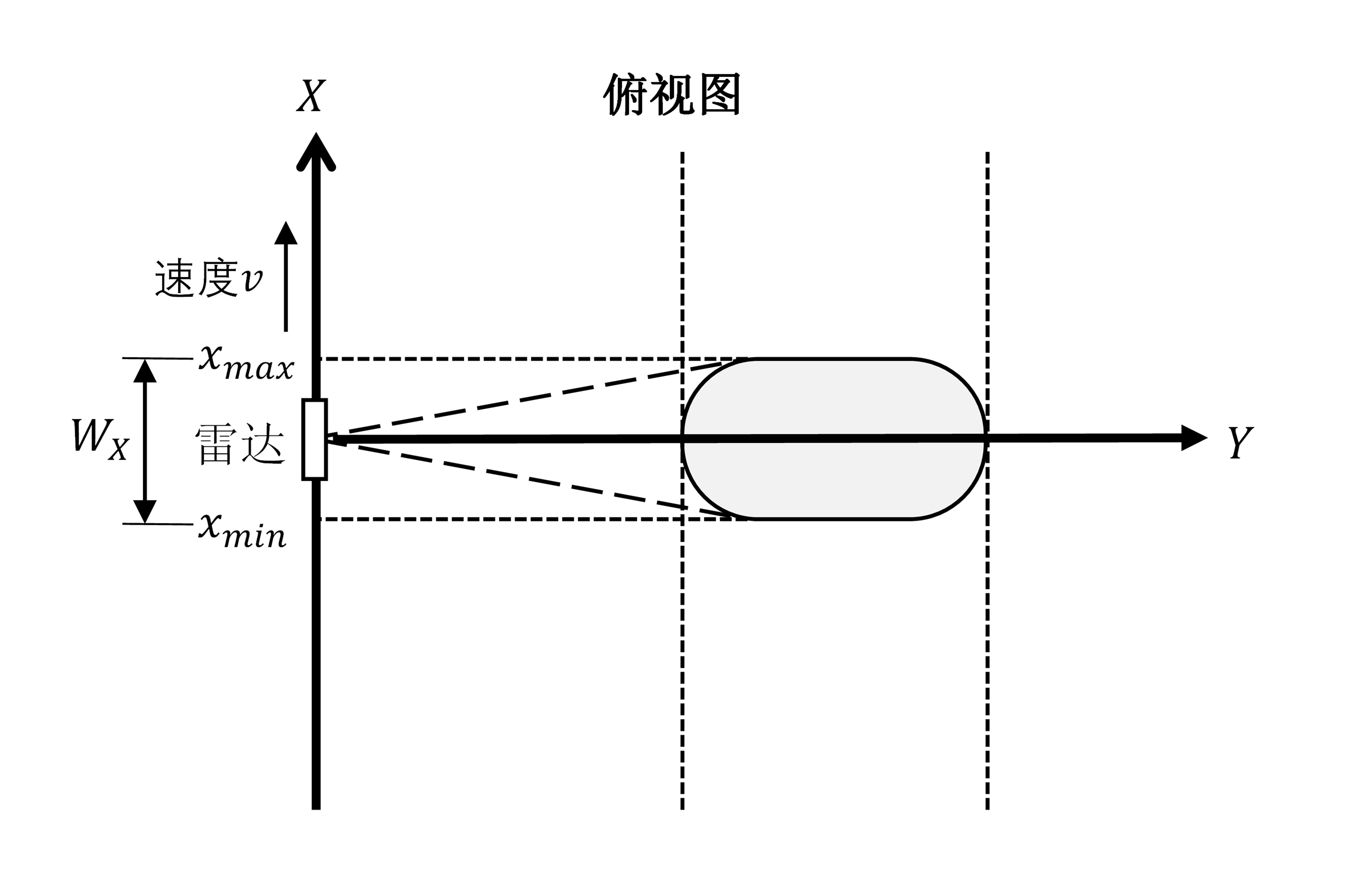
正侧视成像几何的俯视图如上图所示。方位向波束带宽 W X = λ R l W_X=\frac{\lambda R}{l} WX=lλR,因此 x m i n = − λ R 2 l x_{min}=-\frac{\lambda R}{2l} xmin=−2lλR, x m a x = λ R 2 l x_{max}=\frac{\lambda R}{2l} xmax=2lλR,代入 f d f_d fd得, f d , m i n = − v l f_{d, min}=-\frac{v}{l} fd,min=−lv, f d , m a x = v l f_{d, max}=\frac{v}{l} fd,max=lv。多普勒频率范围为 − v l < f d < v l -\frac{v}{l}<f_d<\frac{v}{l} −lv<fd<lv,多普勒带宽为 2 v l \frac{2v}{l} l2v,多普勒中心频率为 f d c = 0 f_{dc}=0 fdc=0。
斜视
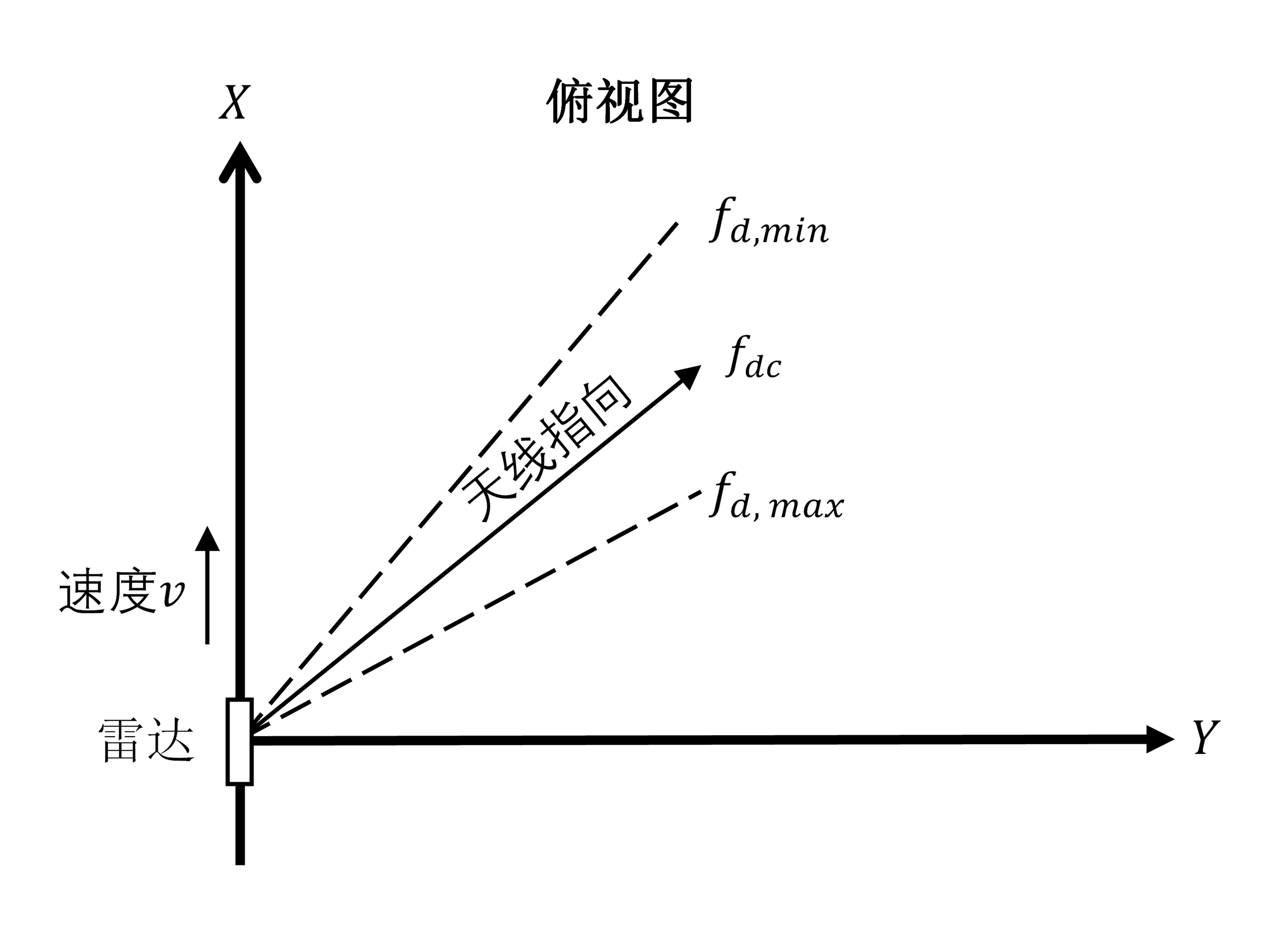
雷达天线指向并不总是与飞行方向垂直,雷达天线指向相对于跨航迹方向的偏离直接体现在多普勒中心频率的偏移上。多普勒带宽仍然为 2 v l \frac{2v}{l} l2v, f d = 2 v λ s i n θ s i n ϕ f_d=\frac{2v}{\lambda}\mathrm{sin}\theta \mathrm{sin}\phi fd=λ2vsinθsinϕ, f d , m i n = f d c − v l f_{d, min}=f_{dc}-\frac{v}{l} fd,min=fdc−lv, f d , m a x = f d c + v l f_{d, max}=f_{dc}+\frac{v}{l} fd,max=fdc+lv。
方位向匹配滤波
正侧视
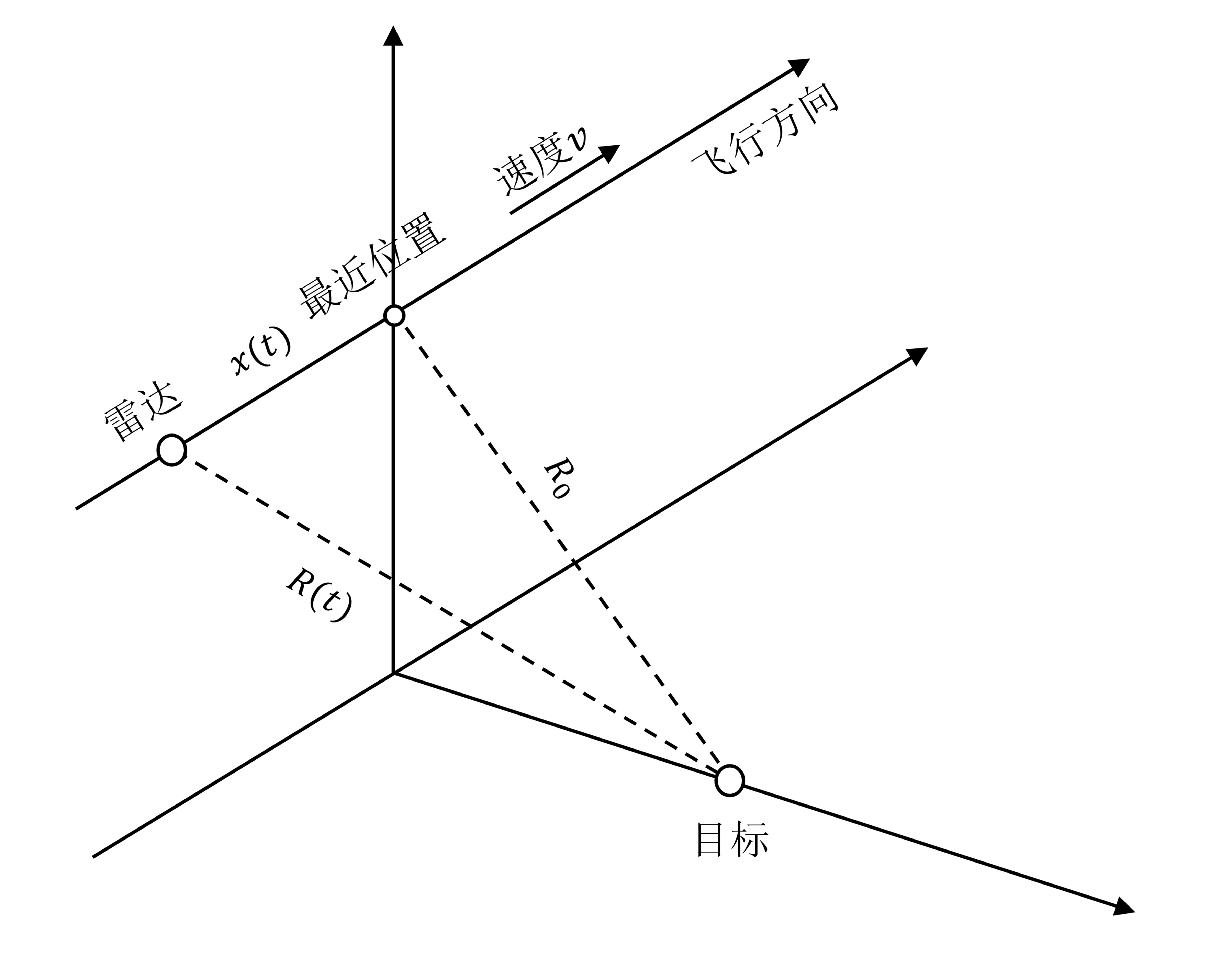
当雷达运动到距离地面目标最近的位置时,地面目标的瞬时多普勒频率为0,这一时刻称为零多普勒时刻,最短距离 R 0 R_0 R0也被称为零多普勒距离。假设雷达以速度 v v v作匀速直线运动, x ( t ) x(t) x(t)表示地面目标与雷达之间在方位向上的距离,令零多普勒时刻为 t = 0 t=0 t=0,则 x ( t ) = v t x(t)=vt x(t)=vt,目标到雷达的距离历程:
R ( t ) = R 0 2 + x 2 ( t ) = R 0 2 + ( v t ) 2 R(t)=\sqrt{R_0^2+x^2(t)}=\sqrt{R_0^2+(vt)^2} R(t)=R02+x2(t) =R02+(vt)2 对应的雷达信号的相位历程:
φ ( t ) = − 2 π ⋅ 2 R ( t ) λ = − 4 π λ R 0 2 + ( v t ) 2 \varphi(t)=-2\pi\cdot\frac{2R(t)}{\lambda}=-\frac{4\pi }{\lambda}\sqrt{R_0^2+(vt)^2} φ(t)=−2π⋅λ2R(t)=−λ4πR02+(vt)2
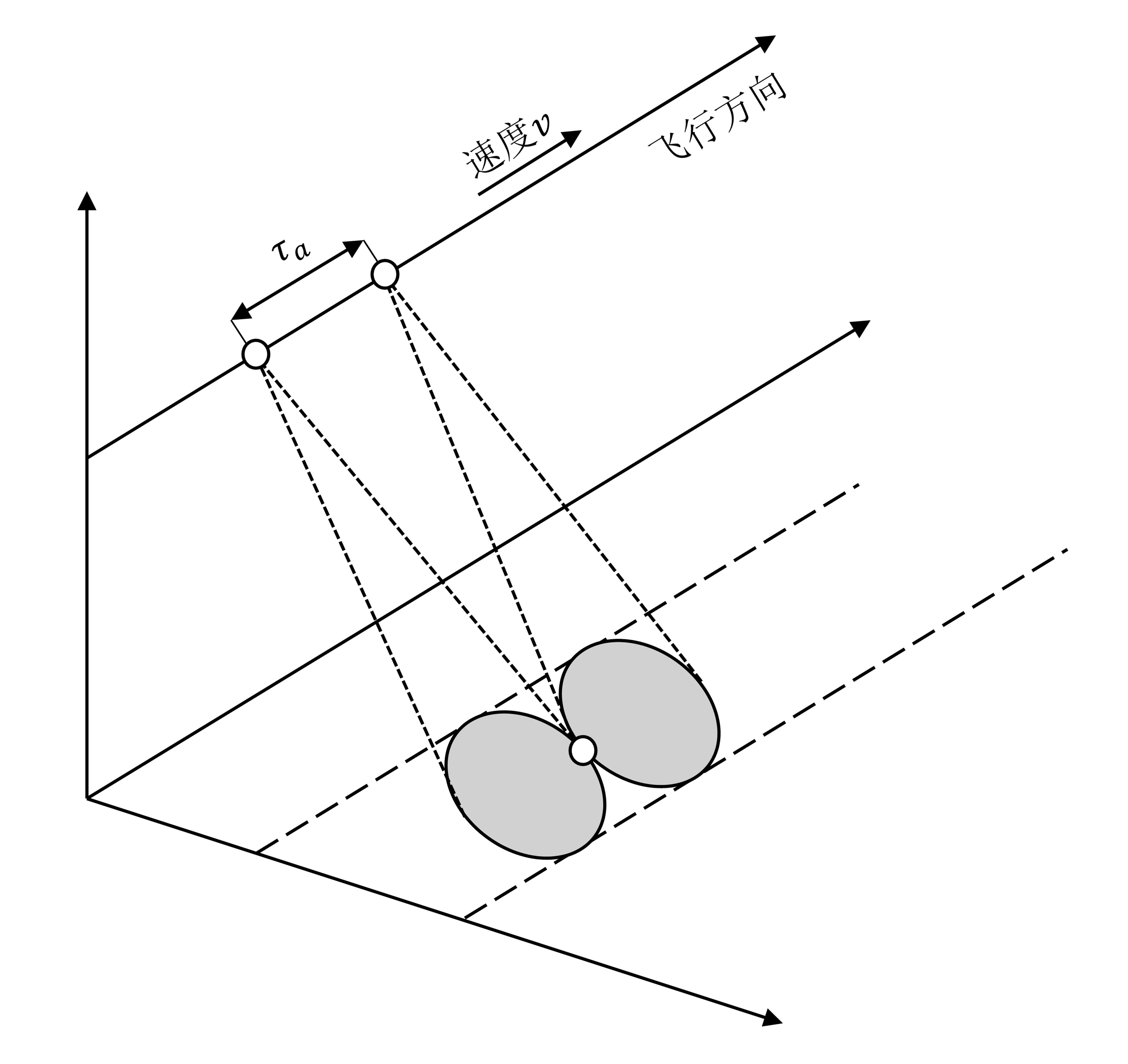
在正侧视的观测几何下,一个目标能够被照亮的时间:
τ a = λ R 0 l v \tau_a=\frac{\lambda R_0}{lv} τa=lvλR0在讨论目标的距离历程/相位历程时,只需要考虑以下时间范围:
− τ a 2 < t < τ a 2 -\frac{\tau_a}{2}<t<\frac{\tau_a}{2} −2τa<t<2τa − λ R 0 l < x ( t ) < λ R 0 l -\frac{\lambda R_0}{l}<x(t)<\frac{\lambda R_0}{l} −lλR0<x(t)<lλR0
因为 λ l ≪ 1 \frac{\lambda}{l}\ll1 lλ≪1,有 x ( t ) ≪ R 0 x(t)\ll R_0 x(t)≪R0,对 φ ( t ) \varphi(t) φ(t)进行一阶Taylor近似:
φ ( t ) = − 4 π R 0 λ 1 + ( v t R 0 ) 2 ≈ − 4 π R 0 λ ( 1 + 1 2 ( v t R 0 ) 2 ) \begin{align*} \varphi(t)&=-\frac{4\pi R_0}{\lambda}\sqrt{1+\left(\frac{vt}{R_0}\right)^2} \\ &\approx -\frac{4\pi R_0}{\lambda}\left(1+\frac{1}{2}\left(\frac{vt}{R_0}\right)^2 \right) \end{align*} φ(t)=−λ4πR01+(R0vt)2 ≈−λ4πR0(1+21(R0vt)2)由此可见,相位历程可以表示为时间的二次函数 。忽略常数相位:
φ ( t ) ≈ − 2 π v 2 λ R 0 t 2 = π K a t 2 \varphi(t)\approx-\frac{2\pi v^2}{\lambda R_0}t^2=\pi K_at^2 φ(t)≈−λR02πv2t2=πKat2其中, K a = − 2 v 2 λ R 0 K_a=-\frac{2v^2}{\lambda R_0} Ka=−λR02v2。忽略常数相位情况下,正侧视雷达信号在方位向上可以被近似看作调频斜率为 K a = − 2 v 2 λ R 0 K_a=-\frac{2v^2}{\lambda R_0} Ka=−λR02v2,中心频率为0的LFM信号。 因此,可以按照距离向处理的方法,使用匹配滤波完成方位向的聚焦处理。
方位向信号的脉冲长度等于目标能够被照亮的时间 τ a = λ R 0 l v \tau_a=\frac{\lambda R_0}{lv} τa=lvλR0,方位向LFM信号的带宽为
B W a = ∣ K a ∣ τ a = 2 v 2 λ R 0 ⋅ λ R 0 l v = 2 v l BW_a=|K_a| \tau_a=\frac{2v^2}{\lambda R_0} \cdot \frac{\lambda R_0}{lv}=\frac{2v}{l} BWa=∣Ka∣τa=λR02v2⋅lvλR0=l2v匹配滤波后方位向冲激响应的时间宽度为带宽的倒数 ρ a = l 2 v \rho_a=\frac{l}{2v} ρa=2vl。因此,SAR的方位向分辨率为
ρ a = l 2 \boxed{\rho_a=\frac{l}{2}} ρa=2lSAR的方位向分辨率只与天线长度有关。
斜视
斜视情况下,方位向聚焦处理的算法与正侧视几乎相同,只需要对用于匹配滤波的参考函数进行简单修改。
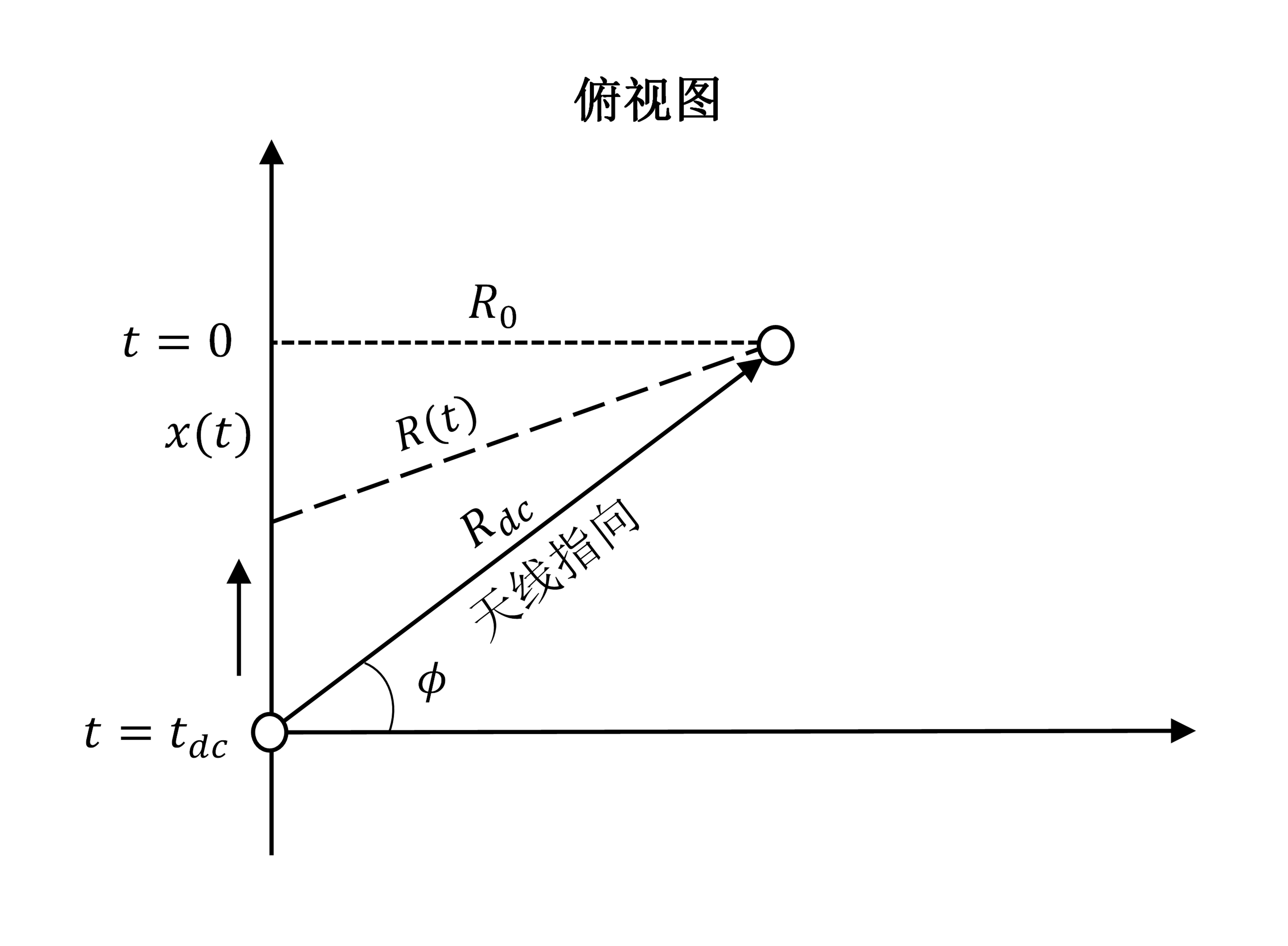
t = 0 t=0 t=0为零多普勒时刻, t = t d c t=t_{dc} t=tdc为多普勒中心时刻,即地面目标的瞬时多普勒频率等于多普勒中心频率的时刻,此时雷达天线指向与雷达目标连线重合。对于前斜视, t d c < 0 t_{dc}<0 tdc<0, f d c > 0 f_{dc}>0 fdc>0。 R d c R_{dc} Rdc表示多普勒中心时刻的斜距:
R d c = R 0 2 + x d c 2 = R 0 2 + v 2 t d c 2 R_{dc}=\sqrt{R_0^2+x_{dc}^2}=\sqrt{R_0^2+v^2t_{dc}^2} Rdc=R02+xdc2 =R02+v2tdc2 斜视成像几何下的距离历程:
R 2 ( t ) = R 0 2 + v 2 t 2 = R d c 2 − v 2 t d c 2 + v 2 t 2 R^2(t)=R_0^2+v^2t^2=R_{dc}^2-v^2t_{dc}^2+v^2t^2 R2(t)=R02+v2t2=Rdc2−v2tdc2+v2t2令 t ′ = t − t d c t'=t-t_{dc} t′=t−tdc,
R 2 ( t ) = R d c 2 − v 2 t d c 2 + v 2 ( t ′ + t d c ) 2 = R d c 2 + v 2 t ′ 2 + 2 v 2 t d c t ′ \begin{align*} R^2(t) &= R_{dc}^2 - v^2 t_{dc}^2 + v^2 (t' + t_{dc})^2 \\ &=R_{dc}^2 + v^2 t'^2 + 2v^2 t_{dc} t' \end{align*} R2(t)=Rdc2−v2tdc2+v2(t′+tdc)2=Rdc2+v2t′2+2v2tdct′泰勒展开,得到
R ( t ) ≈ R d c ( 1 + v 2 t ′ 2 2 R d c 2 + v 2 t d c t ′ R d c 2 ) R(t) \approx R_{dc} \left( 1 + \frac{v^2 t'^2}{2R_{dc}^2} + \frac{v^2 t_{\mathrm{dc}} t'}{R_{dc}^2} \right) R(t)≈Rdc(1+2Rdc2v2t′2+Rdc2v2tdct′)忽略常数相位,斜视成像几何下的相位历程为
φ ( t ) = − 4 π λ R ( t ) = − 4 π R d c λ ( v 2 t ′ 2 2 R d c 2 + v 2 t d c t ′ R d c 2 ) = − 2 π v 2 λ R d c t ′ 2 − 4 π v 2 t d c λ R d c t ′ \begin{align*} \varphi(t) &= -\frac{4\pi}{\lambda} R(t) \\ &= -\frac{4\pi R_{dc}}{\lambda} \left( \frac{v^2 t'^2}{2R_{dc}^2} + \frac{v^2 t_{dc} t'}{R_{dc}^2} \right) \\ &= -\frac{2\pi v^2}{\lambda R_{dc}} t'^2 - \frac{4\pi v^2 t_{dc}}{\lambda R_{dc}} t' \end{align*} φ(t)=−λ4πR(t)=−λ4πRdc(2Rdc2v2t′2+Rdc2v2tdct′)=−λRdc2πv2t′2−λRdc4πv2tdct′与正侧视相比,斜视成像几何下的相位历程仍然是关于 t ′ t' t′的二次函数,不同的是其相位历程增加了一个时间的线性项,用于表示非零中心多普勒频率造成的相位。