《合成孔径雷达成像算法与实现》Ian G. Cumming 第四章
瞬时斜距
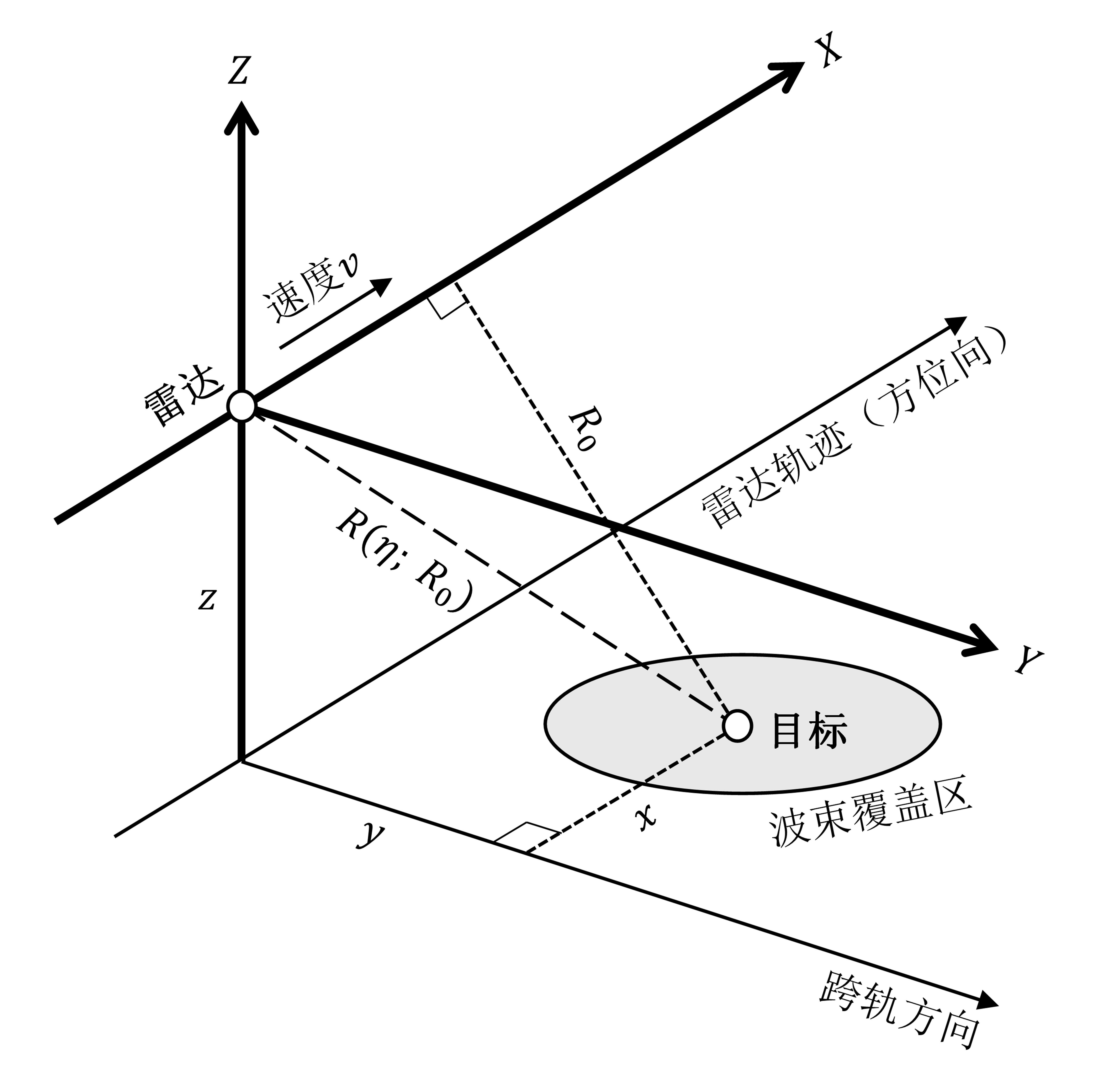
下图给出了SAR成像的几何模型。雷达沿直线匀速飞行,其速度为 v v v,飞行高度为 z z z。以雷达中心为原点,飞行方向为X方向,跨轨迹方向为Y轴,竖直方向为Z轴,建立空间直角坐标系。波束覆盖区中一点目标的坐标为 ( x , y , − z ) (x, y, -z) (x,y,−z), R 0 R_0 R0为目标到飞行轨迹的垂直斜距, R ( η ; R 0 ) R(\eta; R_0) R(η;R0)为目标到雷达的瞬时斜距。 η \eta η表示方位向时间(慢时间), τ \tau τ表示距离向时间(快时间)。瞬时斜距可以表示为:
R ( η ) = ( v η ) 2 + R 0 2 R(\eta)=\sqrt{(v\eta)^2+R_0^2} R(η)=(vη)2+R02
SAR距离向信号
最常用的脉冲是具有LFM特性的脉冲。在距离向,雷达发射的单个LFM脉冲表示为:
s p u l ( τ ) = w r ( τ ) c o s ( 2 π f 0 τ + π K r τ 2 ) s_{pul}(\tau)=w_r(\tau)\mathrm{cos}(2\pi f_0\tau+\pi K_r\tau^2) spul(τ)=wr(τ)cos(2πf0τ+πKrτ2)其中, f 0 f_0 f0为信号载频, K r K_r Kr为距离向脉冲的调频率, w r ( τ ) w_r(\tau) wr(τ)为脉冲包络,未加权时可以近似为矩形:
w r ( τ ) = r e c t ( τ T r ) w_r(\tau)=\mathrm{rect}\left(\frac{\tau}{T_r}\right) wr(τ)=rect(Trτ)其中, T r T_r Tr为脉冲持续时间。
任一照射时刻的反射能量是脉冲波形和照射区域内地面反射系数 g r ( τ ) g_r(\tau) gr(τ)的卷积:
s r ( τ ) = g r ( τ ) ⊗ s p u l ( τ ) s_r(\tau) = g_r(\tau) \otimes s_{pul}(\tau) sr(τ)=gr(τ)⊗spul(τ)
考察距雷达 R a R_a Ra处的一个点目标,其后向散射系数 σ 0 \sigma_0 σ0的幅度为 A 0 ′ A_0' A0′,则 g r ( τ ) = A 0 ′ δ ( τ − 2 R a c ) g_r(\tau)=A_0'\delta(\tau-\frac{2R_a}{c}) gr(τ)=A0′δ(τ−c2Ra),其中 2 R a c \frac{2R_a}{c} c2Ra为该点的信号延时。该目标点的接收信号为:
s r ( τ ) = A 0 ′ s p u l ( τ − 2 R a c ) = A 0 ′ w r ( τ − 2 R a c ) c o s { 2 π f 0 ( τ − 2 R a c ) + π K r ( τ − 2 R a c ) 2 + ψ } \begin{align*} s_r(\tau)&=A_0's_{pul}(\tau-\frac{2R_a}{c}) \\ &=A_0'w_r\left(\tau-\frac{2R_a}{c}\right)\mathrm{cos}\left\{2\pi f_0\left(\tau-\frac{2R_a}{c}\right)+\pi K_r\left(\tau-\frac{2R_a}{c}\right)^2+\psi\right\} \end{align*} sr(τ)=A0′spul(τ−c2Ra)=A0′wr(τ−c2Ra)cos{2πf0(τ−c2Ra)+πKr(τ−c2Ra)2+ψ}其中, ψ \psi ψ表示地表散射过程可能引起的雷达信号相位变化。
SAR方位向信号
随着平台的前进,地面上的某个目标被数百个脉冲照射。主要由于方位向波束方向图 的影响,每个脉冲的回波信号强度存在变化。下图以斜距平面内的3个传感器位置为例,示意了正侧视情况下的方位向波束方向图。
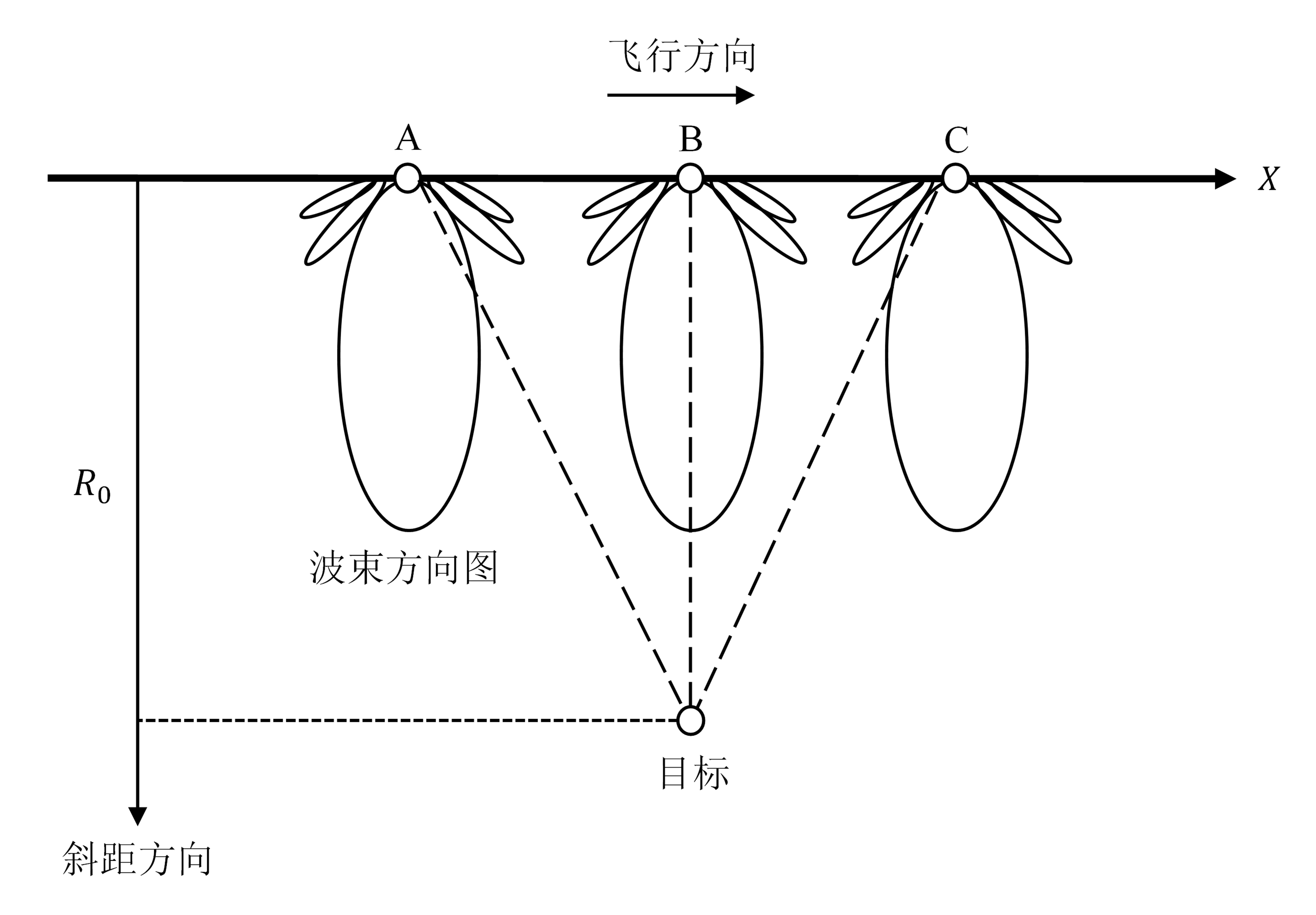
当传感器处于A点时,在目标被波束中心(图中B点)照射之前, 接收信号强度一直不断增加;当波束中心穿过目标后,在目标被波束方向图的第一个零点(图中C点)照射到之前,信号强度又逐渐减弱。 此后仍然可以接收到来自波束方向图副瓣的少许能量。
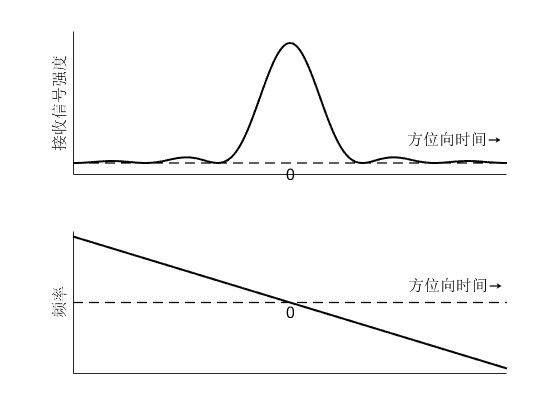
下图示意了方位向波束方向图对接收信号强度和多普勒频率的影响。多普勒频率正比于目标相对于传感器的径向速度。当目标接近雷达时多普勒频率为正, 当目标远离雷达时多普勒频率为负,因此频率随时间变化曲线的斜率为负。
接收信号强度由方位向波束方向图决定。由于大多数SAR天线在方位面内都没有加权,其单程方向图可以近似为一个sinc函数:
p a ( θ ) ≈ sinc ( 0.886 θ β b w ) p_a(\theta) \approx \operatorname{sinc}\!\left(\frac{0.886\,\theta}{\beta_{\mathrm{bw}}}\right) pa(θ)≈sinc(βbw0.886θ)其中 θ \theta θ为斜距平面内测得的与视线的夹角, β b w = 0.886 λ L a \beta_{\mathrm{bw}}=\frac{0.886\lambda}{L_a} βbw=La0.886λ为方位向波束宽度, L a L_a La为方位向天线长度。由于雷达能量的双程传播过程,接收信号的强度由 p a ( θ ) p_a(\theta) pa(θ)的平方给出,并且通常可以表示成 η \eta η的函数:
w a ( η ) = p a 2 { θ ( η ) } w_a(\eta)=p_a^2\{\theta(\eta)\} wa(η)=pa2{θ(η)}
接收信号强度和 R a R_a Ra均随慢时间 η \eta η变化,点目标接收信号可以进一步写成
s r ( τ , η ) = A 0 ′ w a ( η − η c ) s p u l ( τ − 2 R ( η ) c ) = A 0 ′ w a ( η − η c ) w r ( τ − 2 R ( η ) c ) c o s { 2 π f 0 ( τ − 2 R ( η ) c ) + π K r ( τ − 2 R ( η ) c ) 2 + ψ } \begin{align*} s_r(\tau, \eta)&=A_0'w_a(\eta-\eta_c)s_{pul}(\tau-\frac{2R(\eta)}{c}) \\ &=A_0'w_a(\eta-\eta_c)w_r\left(\tau-\frac{2R(\eta)}{c}\right)\mathrm{cos}\left\{2\pi f_0\left(\tau-\frac{2R(\eta)}{c}\right)+\pi K_r\left(\tau-\frac{2R(\eta)}{c}\right)^2+\psi\right\} \end{align*} sr(τ,η)=A0′wa(η−ηc)spul(τ−c2R(η))=A0′wa(η−ηc)wr(τ−c2R(η))cos{2πf0(τ−c2R(η))+πKr(τ−c2R(η))2+ψ}其中, η c \eta_c ηc为多普勒中心时刻, w a ( ⋅ ) w_a(\cdot) wa(⋅)为方位向窗函数,与天线波束形状有关。
解调后的基带信号
回波信号包含了雷达载频 c o s ( 2 π f 0 τ ) \mathrm{cos}(2\pi f_0\tau) cos(2πf0τ),在采样之前,载频必须通过正交解调过程予以去除。解调后单个点目标的基带信号可以表示为复数形式:
s r ( τ , η ) = A 0 w a ( η − η c ) w r ( τ − 2 R ( η ) c ) × exp { − j 4 π f 0 R ( η ) c } exp { j π K r ( τ − 2 R ( η ) c ) 2 } \begin{align*} s_r(\tau, \eta) &= A_0w_a(\eta - \eta_c) \, w_r\!\left(\tau - \frac{2R(\eta)}{c}\right) \notag \\ &\quad \times \exp\left\{-j\,4\pi f_0 \frac{R(\eta)}{c}\right\} \exp\left\{j\pi K_r \left(\tau - \frac{2R(\eta)}{c}\right)^2\right\} \end{align*} sr(τ,η)=A0wa(η−ηc)wr(τ−c2R(η))×exp{−j4πf0cR(η)}exp{jπKr(τ−c2R(η))2}其中, A 0 = A 0 ′ e x p { j ψ } A_0=A_0'\mathrm{exp}\{j\psi\} A0=A0′exp{jψ}。 exp { j π K r ( τ − 2 R ( η ) c ) 2 } \exp\left\{j\pi K_r \left(\tau - \frac{2R(\eta)}{c}\right)^2\right\} exp{jπKr(τ−c2R(η))2}为距离向分量,表示信号本身的变化; − j 4 π f 0 R ( η ) c -j\,4\pi f_0 \frac{R(\eta)}{c} −j4πf0cR(η)为SAR方位向上的相位表达式, exp { − j 4 π f 0 R ( η ) c } \exp\left\{-j\,4\pi f_0 \frac{R(\eta)}{c}\right\} exp{−j4πf0cR(η)}反映了由于雷达平台运动而引起的方位变化。
由于方位向信号常有一个非零的中心频率,该信号只在距离向上是基带信号。
SAR冲激响应
如果忽略 A 0 A_0 A0,则上式为单位幅度点目标的冲激响应,因而SAR传感器的冲激函数可表示成
h i m p ( τ , η ) = w a ( η − η c ) w r ( τ − 2 R ( η ) c ) × exp { − j 4 π f 0 R ( η ) c } exp { j π K r ( τ − 2 R ( η ) c ) 2 } \begin{align*} h_{imp}(\tau, \eta)&= w_a(\eta - \eta_c) \, w_r\!\left(\tau - \frac{2R(\eta)}{c}\right) \notag \\ &\quad \times \exp\left\{-j\,4\pi f_0 \frac{R(\eta)}{c}\right\} \exp\left\{j\pi K_r \left(\tau - \frac{2R(\eta)}{c}\right)^2\right\} \end{align*} himp(τ,η)=wa(η−ηc)wr(τ−c2R(η))×exp{−j4πf0cR(η)}exp{jπKr(τ−c2R(η))2}为了建立地面接收信号的一般模型,将地面反射率与该冲激响应进行二维卷积,从而得出SAR基带信号数据为
s b b ( τ , η ) = g ( τ , η ) ⊗ h i m p ( τ , η ) + n ( τ , η ) s_{bb}(\tau,\eta) = g(\tau,\eta) \otimes h_{imp}(\tau, \eta) + n(\tau,\eta) sbb(τ,η)=g(τ,η)⊗himp(τ,η)+n(τ,η)其中 n ( τ , η ) n(\tau,\eta) n(τ,η)为实际系统中都会存在的附加噪声。这一噪声主要来源于接收电子器件的前端,可以用高斯白噪声来建模。
上式给出的SAR系统模型如下图所示。
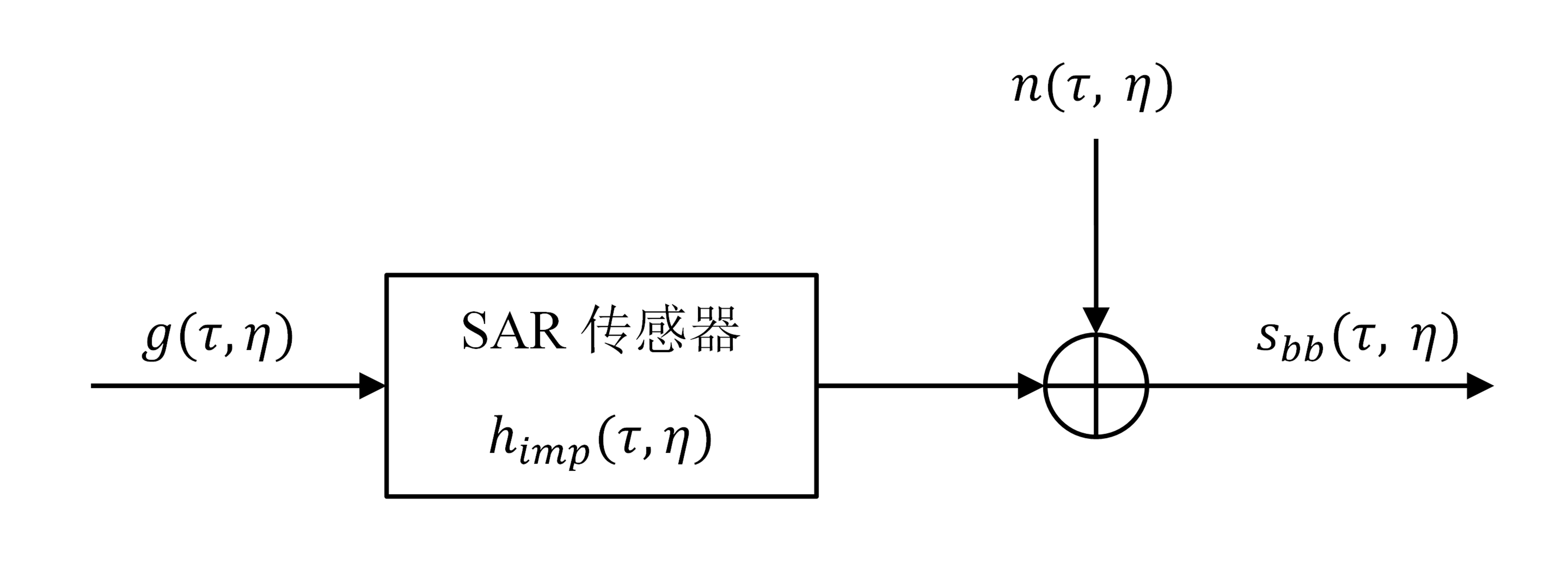
SAR处理被假定为开始于解调后的基带信号 s b b ( τ , η ) s_{bb}(\tau,\eta) sbb(τ,η),SAR处理算法试图通过解卷积 反演出 g ( τ , η ) g(\tau,\eta) g(τ,η)。这一过程的困难与棘手之处在于冲激响应依赖于距离和方位,并且还包含了一个随距离变化的距离徙动。