目录
雷达数据获取的几何关系
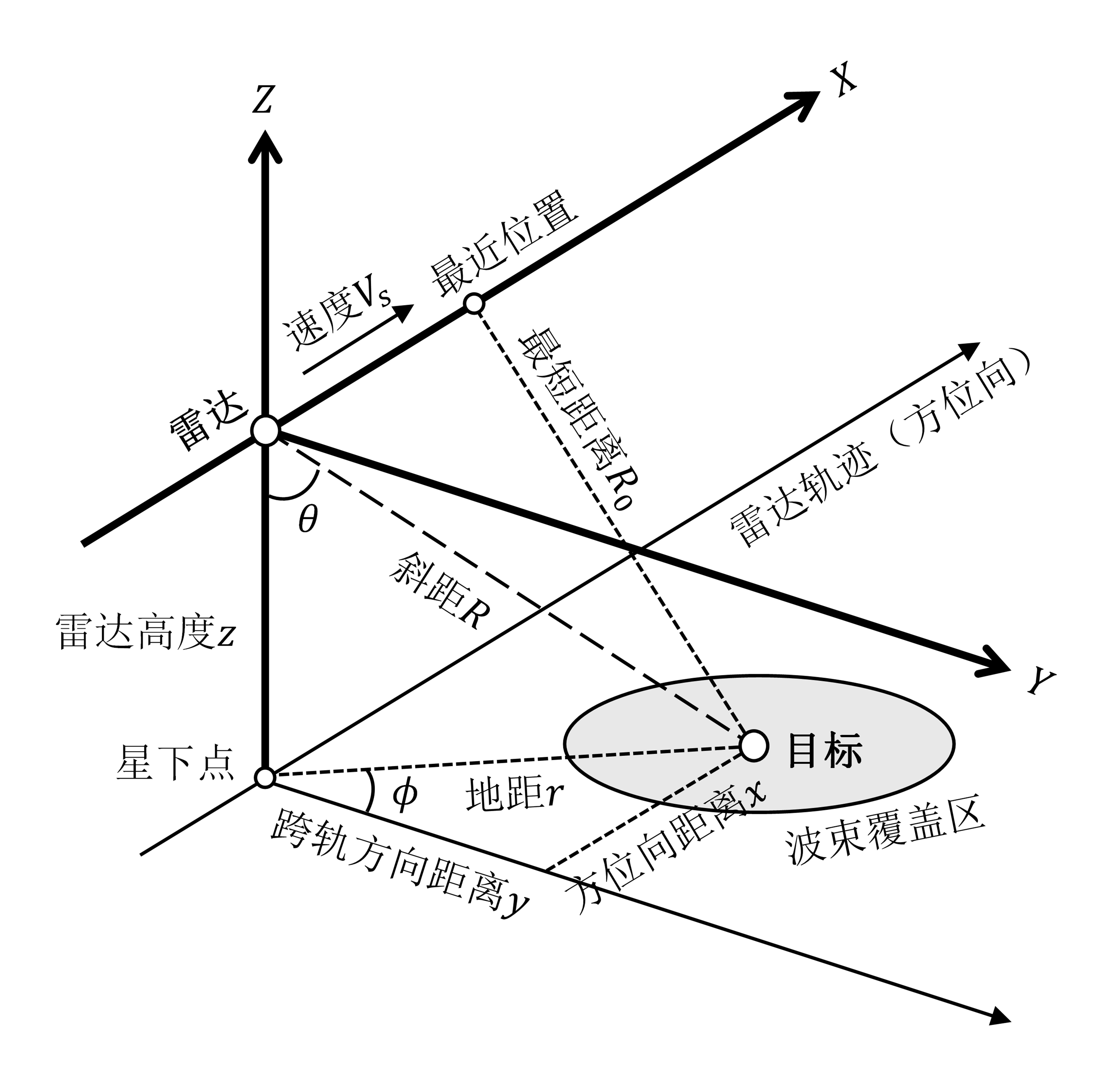
SAR成像几何的一个最重要的特征是侧视 (Side-Looking),也就是雷达在飞行过程中会看向其飞行方向的左侧或右侧,下图所示为右侧视雷达的成像几何。忽略地球曲率,假设地面是一个平面,在这样的平地近似下,以雷达中心为原点O,以雷达运动的方向为X方向,指向雷达右侧的方向为Y方向,竖直方向为Z方向,建立空间直角坐标系。
| 术语 | 定义 | 空间直角坐标系中表示 |
|---|---|---|
| 目标 | 目标是被SAR照射的地球表面上的一个假想点 | ( x , y , − z ) (x, y, -z) (x,y,−z) |
| 星下点 | 星下点是直接位于传感器下方的地表点 | ( 0 , 0 , − z ) (0, 0, -z) (0,0,−z) |
| 最近位置 | 雷达最接近于目标的位置 | ( x , 0 , 0 ) (x, 0, 0) (x,0,0) |
| 斜距 | 目标到雷达中心的距离 | R = x 2 + y 2 + z 2 R=\sqrt{x^2 + y^2 + z^2} R=x2+y2+z2 |
| 地距 | 目标到星下点的距离 | r = x 2 + y 2 r=\sqrt{x^2 + y^2} r=x2+y2 |
| 最短距离 | 零多普勒线经过目标时的斜距 | R 0 = y 2 + z 2 R_0=\sqrt{y^2 + z^2} R0=y2+z2 |
| 下视角 | 斜距方向与竖直方向的夹角 | θ = arcsin x 2 + y 2 r \theta = \arcsin\frac{\sqrt{x^2 + y^2}}{r} θ=arcsinrx2+y2 |
| 斜视角 | 地距方向与跨轨方向的夹角 | ϕ = arcsin x x 2 + y 2 \phi = \arcsin\frac{x}{\sqrt{x^2 + y^2}} ϕ=arcsinx2+y2 x |
| 零多普勒面 | 垂直于平台速度矢量的包含传感器的平面 | |
| 零多普勒线 | 零多普勒面与地面的交线 | |
| 波束覆盖区 | 雷达天线的波束投影到地面的区域 |
ϕ > 0 \phi>0 ϕ>0,前斜视; ϕ < 0 \phi<0 ϕ<0,后斜视; ϕ = 0 \phi=0 ϕ=0,正侧视。
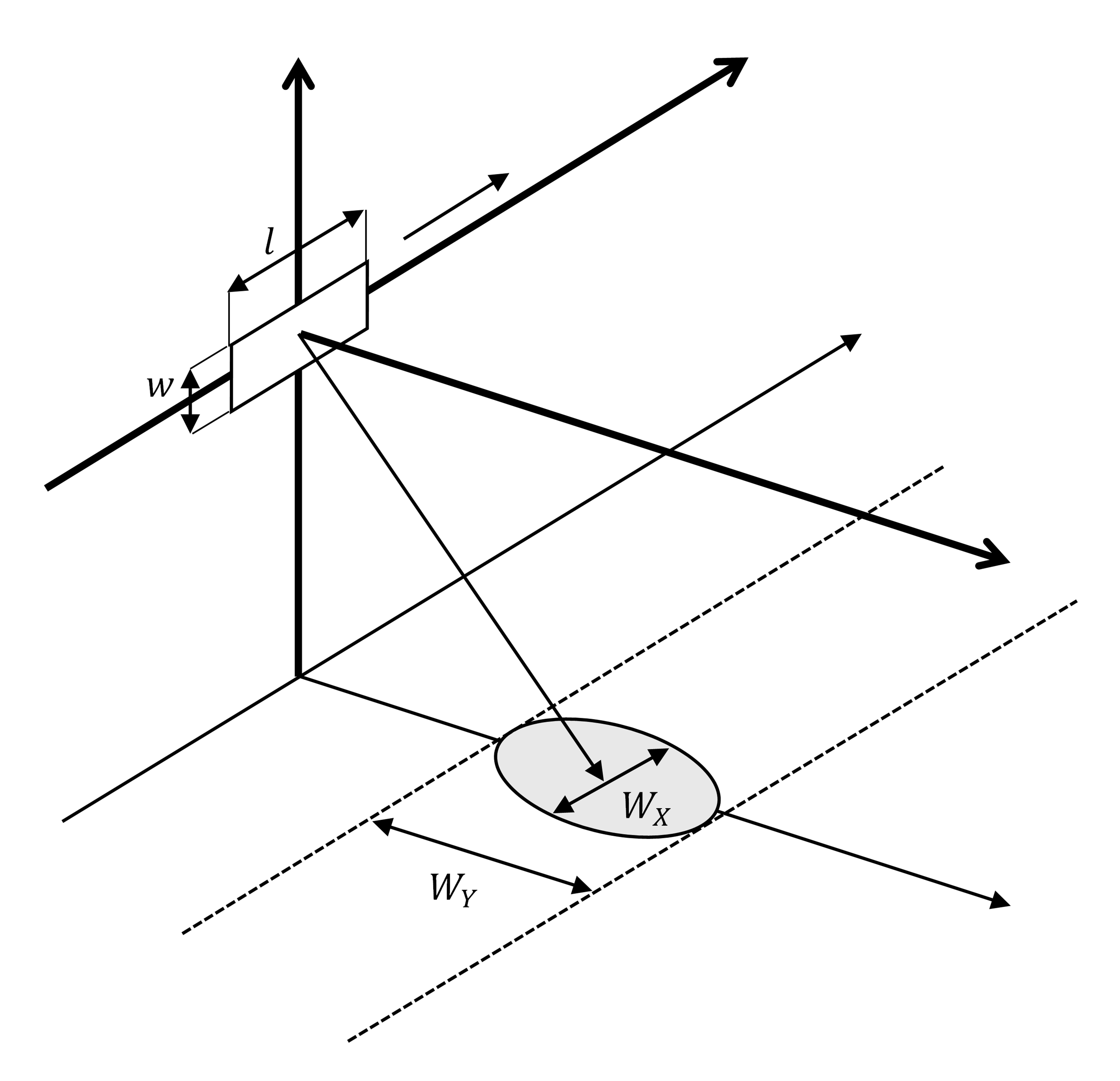
矩形天线波束覆盖区
长度为 l l l,宽度为 w w w的矩形天线,正侧视的波束覆盖区如下图所示, W x W_x Wx为方位向波束照射范围, W Y W_Y WY为距离向波束照射范围。
波束覆盖区的俯视图与侧视图如下图所示,方位向波束角和距离向波束角的大小分别为 λ l \frac{\lambda}{l} lλ和 λ w \frac{\lambda}{w} wλ,雷达能够照射到的最近和最远地面距离为 y n e a r y_{near} ynear和 y f a r y_{far} yfar,且 W Y = y f a r − y n e a r W_Y=y_{far}-y_{near} WY=yfar−ynear。
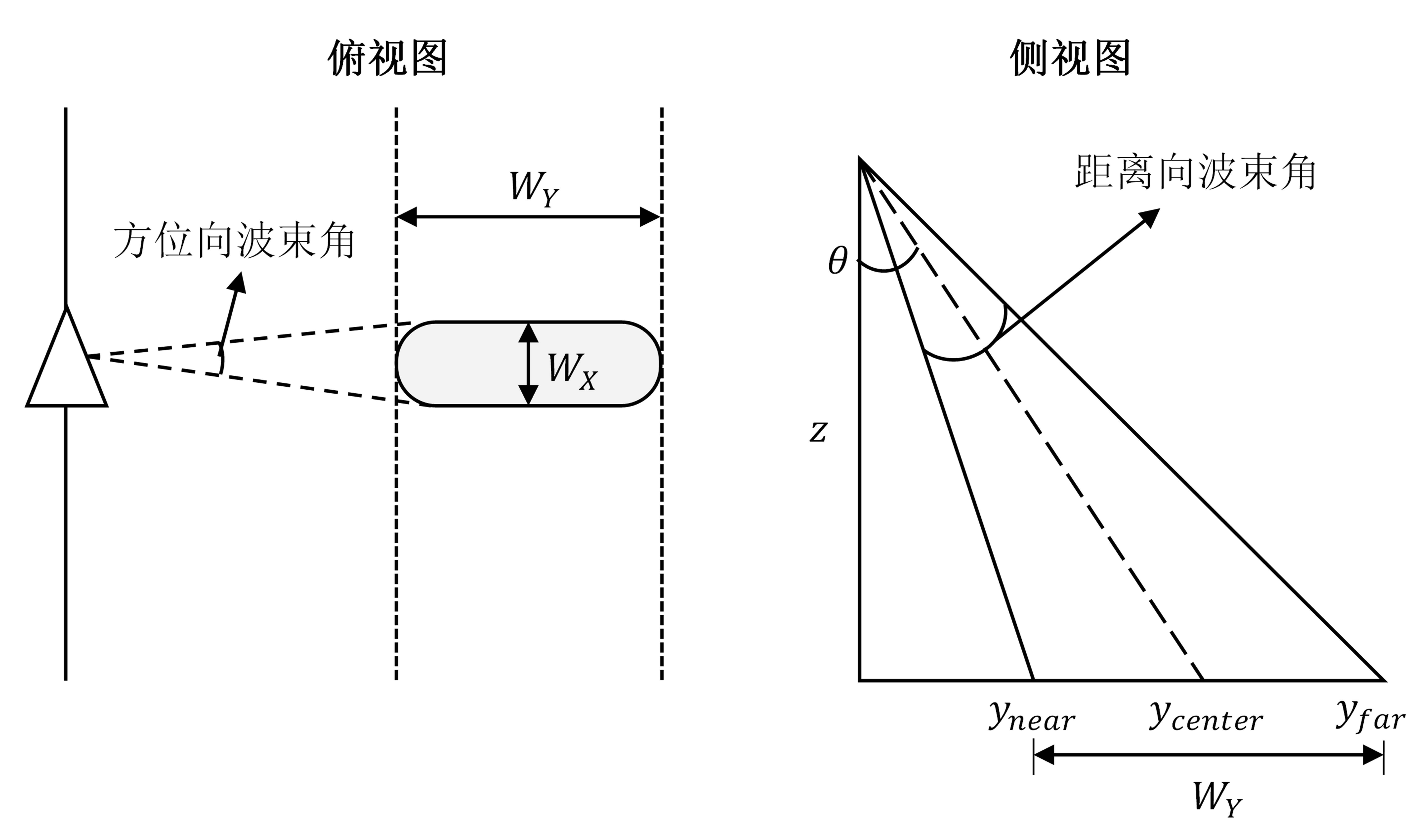 W X = R ⋅ λ l W_X=R\cdot \frac{\lambda}{l} WX=R⋅lλ W Y = y f a r − y n e a r = z tan ( θ + λ 2 w ) − tan ( θ − λ 2 w ) W_Y = y_{\mathrm{far}} - y_{\mathrm{near}} = z\left\\tan\\left(\\theta + \\frac{\\lambda}{2w}\\right) - \\tan\\left(\\theta - \\frac{\\lambda}{2w}\\right)\\right WY=yfar−ynear=ztan(θ+2wλ)−tan(θ−2wλ)当 λ w ≪ 1 \frac{\lambda}{w} \ll 1 wλ≪1时, W Y ≈ z λ w cos 2 θ W_Y \approx \frac{z\lambda}{w\cos^2\theta} WY≈wcos2θzλ
W X = R ⋅ λ l W_X=R\cdot \frac{\lambda}{l} WX=R⋅lλ W Y = y f a r − y n e a r = z tan ( θ + λ 2 w ) − tan ( θ − λ 2 w ) W_Y = y_{\mathrm{far}} - y_{\mathrm{near}} = z\left\\tan\\left(\\theta + \\frac{\\lambda}{2w}\\right) - \\tan\\left(\\theta - \\frac{\\lambda}{2w}\\right)\\right WY=yfar−ynear=ztan(θ+2wλ)−tan(θ−2wλ)当 λ w ≪ 1 \frac{\lambda}{w} \ll 1 wλ≪1时, W Y ≈ z λ w cos 2 θ W_Y \approx \frac{z\lambda}{w\cos^2\theta} WY≈wcos2θzλ
证明:当 λ w ≪ 1 \frac{\lambda}{w} \ll 1 wλ≪1时,令 α = λ 2 w \alpha = \frac{\lambda}{2w} α=2wλ,有
W Y = z tan ( θ + α ) − tan ( θ − α ) W_Y = z\left\\tan(\\theta + \\alpha) - \\tan(\\theta - \\alpha)\\right WY=ztan(θ+α)−tan(θ−α)对tan函数进行一阶Taylor近似: tan ( θ + α ) ≈ tan θ + α ⋅ sec 2 θ = tan θ + α cos 2 θ \tan(\theta + \alpha) \approx \tan\theta + \alpha \cdot \sec^2\theta = \tan\theta + \frac{\alpha}{\cos^2\theta} tan(θ+α)≈tanθ+α⋅sec2θ=tanθ+cos2θα tan ( θ − α ) ≈ tan θ − α ⋅ sec 2 θ = tan θ − α cos 2 θ \tan(\theta - \alpha) \approx \tan\theta - \alpha \cdot \sec^2\theta = \tan\theta - \frac{\alpha}{\cos^2\theta} tan(θ−α)≈tanθ−α⋅sec2θ=tanθ−cos2θα代入 W Y W_Y WY,有
W Y ≈ z ( tan θ + α cos 2 θ ) − ( tan θ − α cos 2 θ ) = z ⋅ 2 α cos 2 θ = z ⋅ 2 ⋅ λ 2 w cos 2 θ W_Y \approx z\left\\left(\\tan\\theta + \\frac{\\alpha}{\\cos\^2\\theta}\\right) - \\left(\\tan\\theta - \\frac{\\alpha}{\\cos\^2\\theta}\\right)\\right = z \cdot \frac{2\alpha}{\cos^2\theta} = z \cdot \frac{2 \cdot \frac{\lambda}{2w}}{\cos^2\theta} WY≈z(tanθ+cos2θα)−(tanθ−cos2θα)=z⋅cos2θ2α=z⋅cos2θ2⋅2wλ
参考
and
《合成孔径雷达成像算法与实现》Ian G. Cumming 第四章