目录
[0. 目标](#0. 目标)
[1. 最基础的数学恒等式](#1. 最基础的数学恒等式)
[2. 为什么要放大 2ⁿ?](#2. 为什么要放大 2ⁿ?)
[3. 用移位实现除以 2ⁿ](#3. 用移位实现除以 2ⁿ)
[4. 用一个具体数字彻底看懂](#4. 用一个具体数字彻底看懂)
[5. 提高精度:n 取更大](#5. 提高精度:n 取更大)
[6. 数学上的误差来源](#6. 数学上的误差来源)
[7. 最精炼的数学总结](#7. 最精炼的数学总结)
[8. 为什么图像处理必须用这个?](#8. 为什么图像处理必须用这个?)
0. 目标
我们要计算:y=a/b
但不想做除法,想换成:y≈a×K
也就是:找到一个常数 K,使得 K ≈ 1/b
1. 最基础的数学恒等式
a/b=a×1/b
这是整个方法的唯一基石。
只要我们能用某种方式表示 1/b,就能把除法完全变成乘法。
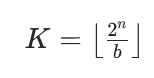
2. 为什么要放大 2ⁿ?
计算机 / 硬件不能直接算小数,只能算整数。
所以我们把 1/b 放大 2ⁿ 倍,变成整数:
于是:
也就是:
这就是最核心公式。
3. 用移位实现除以 2ⁿ
在二进制里:
所以最终变成:
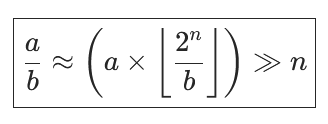
- ⌊⌋ 表示取整(因为硬件只能存整数)
- ≈ 是因为取整带来微小误差
4. 用一个具体数字彻底看懂
我们算:100/5=20
选 n = 8(放大 256 倍)
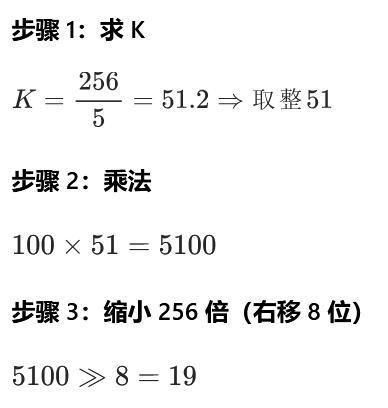
真实值 20,计算值 19,误差来自取整。
5. 提高精度:n 取更大
n = 16(65536)
K=65536/5=13107.2⇒13107
100×13107=1310700
1310700≫16=20
完全精确!
6. 数学上的误差来源
只有一个误差源:
即把小数强行变成整数。
n 越大,误差越小:
- n=8 → 误差最大 1/256
- n=16 → 误差最大 1/65536
- n=32 → 几乎无误差
7. 最精炼的数学总结
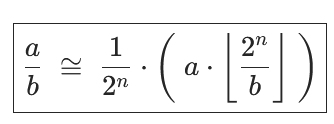
一句话:倒数放大 → 乘法 → 缩小还原
8. 为什么图像处理必须用这个?
- 除法在硬件里是复杂迭代运算,慢
- 乘法是单周期并行运算,快
- 图像每秒百万像素,必须流水线
- 查表法延迟固定,适合 ISP