一、系统简介
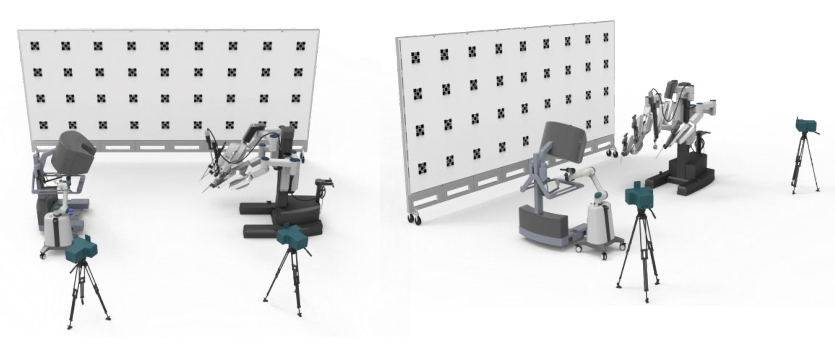
医用腹腔镜机器人检测系统以高速双目空间测试仪为核心,结合标准空间定位工装、直线位移模组、力学传感器、光电传感器、测试靶标、系统分析软件、关节臂等(可拓展激光跟踪仪)组成组成腹腔内窥镜手术机器人的性能检测系统,实现了对运动过程中的六维位姿精度等性能的测量和计算。
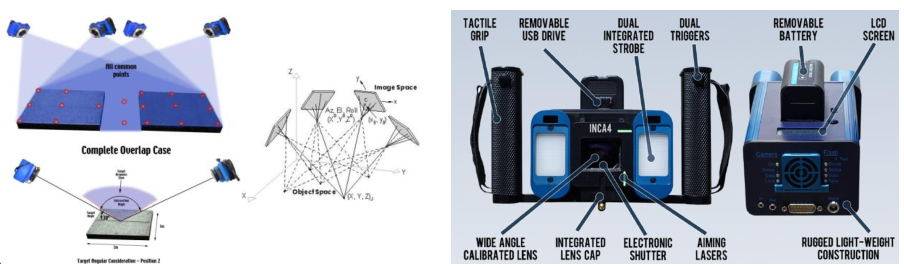
医用手术机器人检测系统核心检测技术均已在航空航天等超高进度领域复杂工件检测环节得到充分验证。系统广泛应用于国jia与省级医疗器械检测机构,市占率领先。系统采用国际先进的高精度光学三维测量技术,通过双目相机高速立体视觉系统实现亚像素级空间重建与精度检测。高速双目空间测试仪 精度分别达到 30μm+30μm/m,帧率为 500Hz 的测量准确度。
医用腹腔镜机器人测试系统
医用腹腔镜机器人检测系统实现了对机器人运动过程中六维位姿精度的测量,在国内率先支持 《GB/T 12642-2013 / ISO 9283:1998工业机器人性能规范及其试验方法》 所规定的工业机器人性能指标和 《YY∕T 1712-2021 采用机器人技术的辅助手术设备和辅助手术系统》 、《YY/T1941-2024采用机器人技术的腹腔内窥镜手术系统》所规定的医疗机器人性能指标的测量。
此外,还可拓展支持 GB/T 12642-2013 中规定的 14 项性能指标测量,支持工业六轴(包含腕部偏置、肩部偏置机型)、工业四轴码垛、工业五轴、工业四轴SCARA、工业六轴协作、工业七轴协作、并联Delta、直角坐标机器人等机型。定制化算法可以对串联关节机器人的连杆长度、TCP精度、零位、减速比、耦合比的校准,支持工业六轴(包含腕部偏置、肩部偏置机型)、工业四轴码垛、工业五轴、工业四轴SCARA、工业六轴协作、工业七轴协作机型。
系统已依据 VDI/VDE 2634 光学三维测量系统国际标准完成全面测试与验证,确保测量结果的可靠性与可溯源性。测量过程 全程非接触式,尤其适用于不能被机械触碰的高精密手术机器人特殊环境。具备 高速度与高灵活性,几分钟即可完成空间重建,多相机在线系统可实现实时结果输出。其模块化设计和电池供电结构使设备具备卓越的便携性,能够在狭窄空间或存在振动的环境中稳定运行。凭借三十余年的技术积累与广泛的行业验证,系统可在手术机器人结构件、运动学精度、空间位姿及操作臂变形特性等关键参数的检测中,提供可靠、快速、可追溯的三维计量支持。
二、原理介绍
双目相机高速立体视觉系统
双目视觉空间测量系统由摄影测量相机、测量软件及SA数据分析软件组成,是手术机器人空间位置与姿态检测的核心设备。系统能够对空间点、线、面进行高精度拟合分析,实现机器人多自由度动作的全面测量。系统具备以下特点:
测试效率高:在多相机模式下可即时生成测量数据,减少数据计算时间,提高整体测试效率;多目标同时追踪:基于双目视觉原理,可同时跟踪多个目标,对医用手术机器人多轴联动及主从跟随性能可一次性完成测量;
测量数据多样化:系统不仅支持 3D 空间坐标测量,还可直接测量 6D 姿态,确保位姿测量的准确度与重复性,同时兼顾效率与精度,避免二次处理;
设备拓展性强:摄影测量相机可自由移动,克服传统激光设备因遮挡导致的测量中断问题,即使被测物遮挡,也可通过调整相机位置继续测量,无需手动重新定位。该系统为医用手术机器人的精度检测、性能评估及安全验证提供了高效、灵活且可靠的测量解决方案。30余家客户的共同选择,200+医疗检测案例集,提供全方位的使用培训。
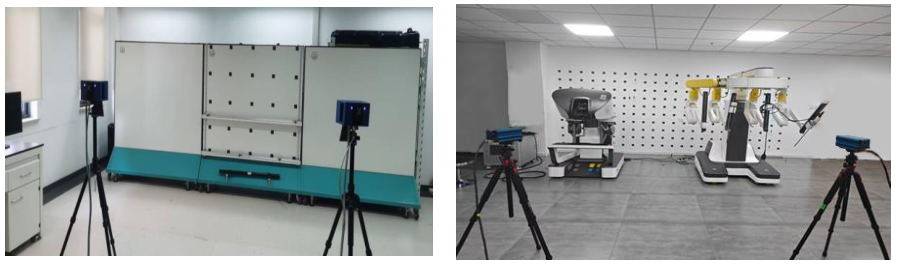
国家级检测机构应用示范案例
测量系统架设简单,将两台相机正对标定好的背景墙放置,用相机连接电缆将相机与联机控制器连接,联机控制器与电脑有线连接。联机控制器为系统的数据采集模块,具备:多相机组合测试的数据采集,外触发接口控制、负载传感器的通信及数据读取等功能。
三、分析软件
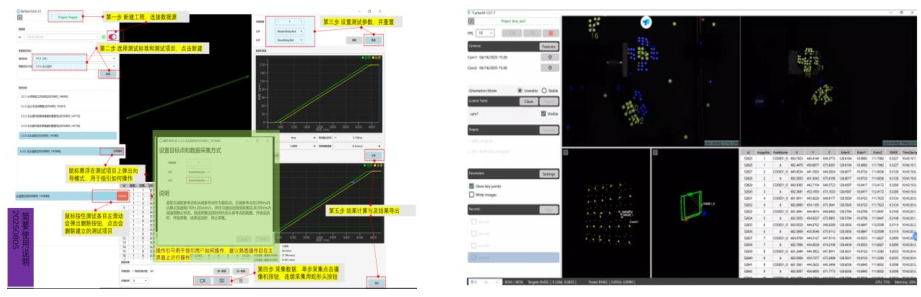
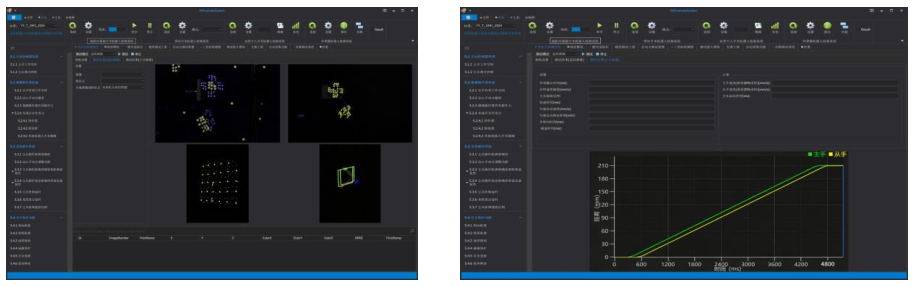
专业版医用手术机器人测试与数据分析软件
与国家级实验室共同研发专业版的空间姿态运功测试软件与测试数据分析软件,软件可以实现自动化测试与分析从手有效工作空间 、远心不动点、主从操作距离重复性、主从操作距离准确度 、主从操作距离重复性、主从操作姿态准确度 、主从操作姿态重复性 、主从控制延时、主从距离缩放比、制动距离 、 滑落距离 、速度限制、滑落距离等测试项目。
专业的自动化点云数据输出与建模软件
系统可实现输出标准点云数据,坐标系可支持受笛卡尔坐标系、欧拉坐标系、位姿矩阵等。可快速帮助用户构建三维立体运动模型。通过软件的追踪定位算法,可以实现测量最小采样点构建运动轨迹功能,实现真正意义上的高精度快速测量。为用户定制高阶版本空间测量分析软件,拓展具身智能。并支持探针与工装套件,最大程度为客户提供专业的测试技术附加服务。
拓展版测量数据分析拓展版软件