真题示例
校内 题签B,10道选择 题 题签

校内 题签B,30道计算题 题签

一、答案速览
| 第1题 | 第2题 | 第3题 | 第4题 | 第5题 |
|---|---|---|---|---|
| A | B | B | C | C |
| 第6题 | 第7题 | 第8题 | 第9题 | 第10题 |
|---|---|---|---|---|
| B | B | B | B | D |
说明: 后面的步骤属于考试中可以直接套用的"简化版思路"。
二、各题答案与简化步骤
第1题
答案:A
简化步骤:
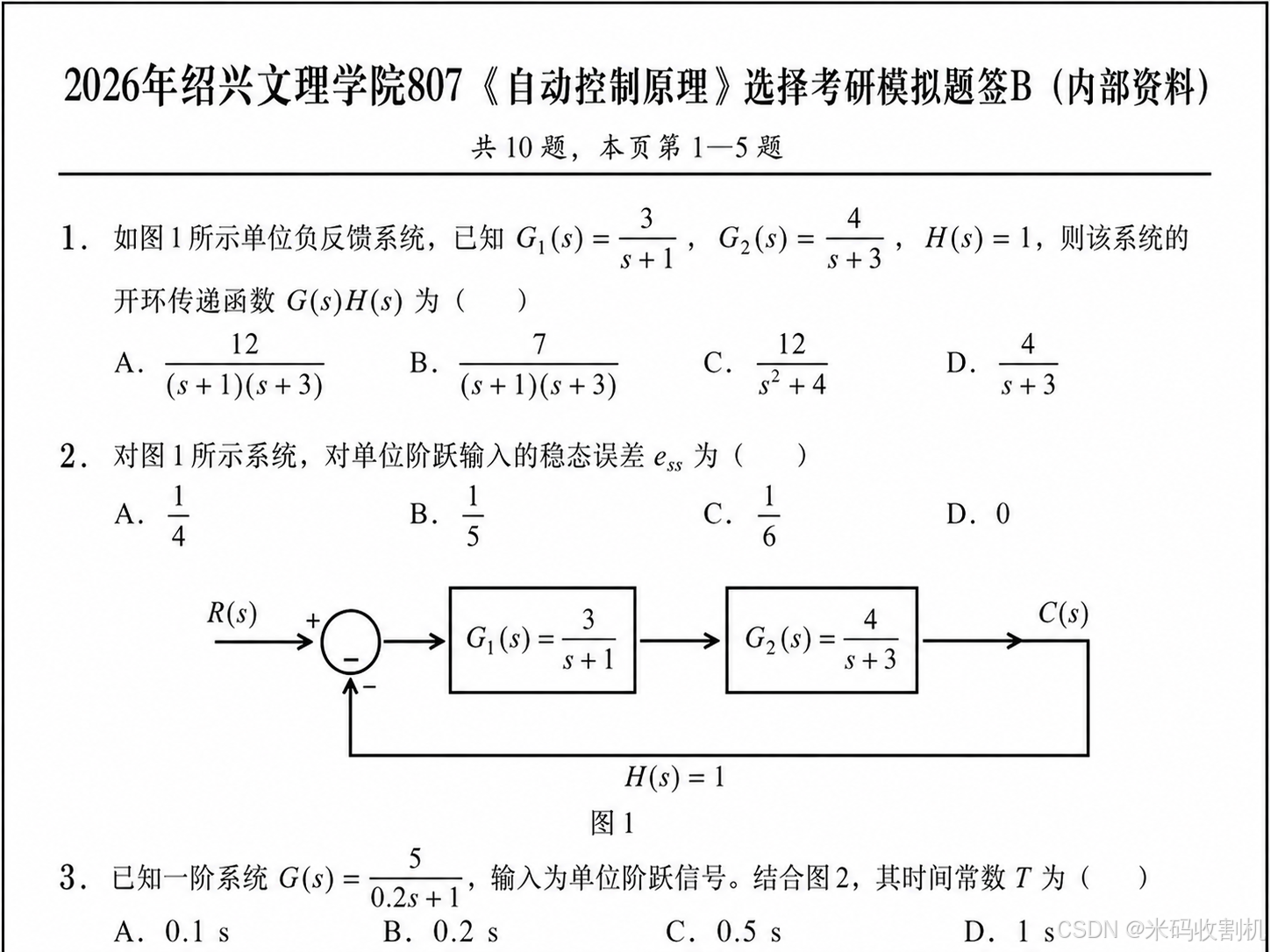
- 开环传递函数等于串联环节与反馈环节的乘积。
- G(s)H(s)=G1(s)⋅G2(s)⋅H(s)=3s+1⋅4s+3⋅1 G(s)H(s)=G_1(s)\cdot G_2(s)\cdot H(s)=\frac{3}{s+1}\cdot \frac{4}{s+3}\cdot 1 G(s)H(s)=G1(s)⋅G2(s)⋅H(s)=s+13⋅s+34⋅1
- 化简得:
G(s)H(s)=12(s+1)(s+3) G(s)H(s)=\frac{12}{(s+1)(s+3)} G(s)H(s)=(s+1)(s+3)12
第2题
答案:B
简化步骤:
- 由图1可知,该系统是单位负反馈、0型系统。
- 先求位置误差系数:
Kp=lims→0G(s)=12(1)(3)=4 K_p=\lim_{s\to 0}G(s)=\frac{12}{(1)(3)}=4 Kp=s→0limG(s)=(1)(3)12=4 - 单位阶跃稳态误差:
ess=11+Kp=15 e_{ss}=\frac{1}{1+K_p}=\frac{1}{5} ess=1+Kp1=51
第3题
答案:B
简化步骤:
- 一阶系统标准形式:
G(s)=KTs+1 G(s)=\frac{K}{Ts+1} G(s)=Ts+1K - 与题目中的
G(s)=50.2s+1 G(s)=\frac{5}{0.2s+1} G(s)=0.2s+15
对比。 - 可直接得到时间常数:
T=0.2 s T=0.2\text{ s} T=0.2 s
第4题
答案:C
简化步骤:
- 单位阶跃输入下,一阶系统稳态值等于静态增益。
- 令
s→0 s\to 0 s→0
可得
G(0)=5 G(0)=5 G(0)=5 - 所以:
c(∞)=5 c(\infty)=5 c(∞)=5
第5题
答案:C
简化步骤:
- 一阶系统单位阶跃响应公式:
c(t)=K(1−e−t/T) c(t)=K(1-e^{-t/T}) c(t)=K(1−e−t/T) - 当
t=T t=T t=T
时,
c(T)=K(1−e−1) c(T)=K(1-e^{-1}) c(T)=K(1−e−1) - 常用近似:
1−e−1≈0.632 1-e^{-1}\approx 0.632 1−e−1≈0.632
所以:
c(T)≈0.632K c(T)\approx 0.632K c(T)≈0.632K
第6题
答案:B
简化步骤:
- 已知
G(s)H(s)=K(s+2)s(s+1)(s+4) G(s)H(s)=\frac{K(s+2)}{s(s+1)(s+4)} G(s)H(s)=s(s+1)(s+4)K(s+2)
可直接读出开环零极点。 - 分母给出极点:
s=0, −1, −4 s=0,\ -1,\ -4 s=0, −1, −4
共3个极点。 - 分子给出零点:
s=−2 s=-2 s=−2
共1个零点。
第7题
答案:B
简化步骤:
- 根轨迹渐近线与实轴交点公式:
σa=∑极点−∑零点n−m \sigma_a=\frac{\sum 极点-\sum 零点}{n-m} σa=n−m∑极点−∑零点 - 计算:
∑极点=0+(−1)+(−4)=−5 \sum 极点=0+(-1)+(-4)=-5 ∑极点=0+(−1)+(−4)=−5
∑零点=−2 \sum 零点=-2 ∑零点=−2
n−m=3−1=2 n-m=3-1=2 n−m=3−1=2 - 代入得:
σa=−5−(−2)2=−32=−1.5 \sigma_a=\frac{-5-(-2)}{2}=\frac{-3}{2}=-1.5 σa=2−5−(−2)=2−3=−1.5

第8题
答案:B
简化步骤:
- 增益交越频率满足:
∣G(jω)∣=1 |G(j\omega)|=1 ∣G(jω)∣=1 - 题中
G(s)=10s(s+1) G(s)=\frac{10}{s(s+1)} G(s)=s(s+1)10
所以
∣G(jω)∣=10ω1+ω2 |G(j\omega)|=\frac{10}{\omega\sqrt{1+\omega^2}} ∣G(jω)∣=ω1+ω2 10 - 由图4也可直接读出穿越 0 dB 处约在:
3 rad/s 3\text{ rad/s} 3 rad/s
因此选 B。
第9题
答案:B
简化步骤:
- 相位裕度定义:
γ=180∘+φ(ωc) \gamma=180^\circ+\varphi(\omega_c) γ=180∘+φ(ωc) - 由图4在增益交越频率处,相位约为:
−162∘ -162^\circ −162∘ - 所以:
γ≈180∘−162∘=18∘ \gamma\approx 180^\circ-162^\circ=18^\circ γ≈180∘−162∘=18∘
第10题
答案:D
简化步骤:
- 对于
G(s)=10s(s+1) G(s)=\frac{10}{s(s+1)} G(s)=s(s+1)10
相角为:
φ(ω)=−90∘−arctanω \varphi(\omega)=-90^\circ-\arctan\omega φ(ω)=−90∘−arctanω - 随着 ω\omegaω 增大,φ(ω)\varphi(\omega)φ(ω) 只会逐渐逼近 −180∘-180^\circ−180∘。
- 因此不存在有限的相角交越频率,选"无有限值"。
使用建议
先记住"答案速览",再按"公式---代入---结论"三步法去记忆每题的简化步骤。
第1题
已知:
G1(s)=2s+1,G2(s)=5s+2,H(s)=1 G_1(s)=\frac{2}{s+1},\quad G_2(s)=\frac{5}{s+2},\quad H(s)=1 G1(s)=s+12,G2(s)=s+25,H(s)=1
答案
1. 闭环传递函数
先求前向通道串联后的开环传递函数:
G(s)=G1(s)G2(s)=10(s+1)(s+2) G(s)=G_1(s)G_2(s)=\frac{10}{(s+1)(s+2)} G(s)=G1(s)G2(s)=(s+1)(s+2)10
单位负反馈闭环传递函数为:
Φ(s)=C(s)R(s)=G(s)1+G(s) \Phi(s)=\frac{C(s)}{R(s)}=\frac{G(s)}{1+G(s)} Φ(s)=R(s)C(s)=1+G(s)G(s)
代入得:
Φ(s)=10(s+1)(s+2)+10=10s2+3s+12 \Phi(s)=\frac{10}{(s+1)(s+2)+10}=\frac{10}{s^2+3s+12} Φ(s)=(s+1)(s+2)+1010=s2+3s+1210
2. 系统型别
开环传递函数中没有积分环节,因此是:
0型系统
3. 单位阶跃稳态误差
位置误差系数:
Kp=lims→0G(s)=101⋅2=5 K_p=\lim_{s\to 0}G(s)=\frac{10}{1\cdot 2}=5 Kp=s→0limG(s)=1⋅210=5
稳态误差:
ess=11+Kp=16 e_{ss}=\frac{1}{1+K_p}=\frac{1}{6} ess=1+Kp1=61
第2题
已知:
G(s)=40.5s+1 G(s)=\frac{4}{0.5s+1} G(s)=0.5s+14
输入为单位阶跃信号。
答案
1. 单位阶跃响应
C(s)=40.5s+1⋅1s C(s)=\frac{4}{0.5s+1}\cdot \frac{1}{s} C(s)=0.5s+14⋅s1
反拉普拉斯变换得:
c(t)=4(1−e−2t),t≥0 c(t)=4(1-e^{-2t}),\quad t\ge 0 c(t)=4(1−e−2t),t≥0
2. 时间常数
与一阶标准形式
KTs+1 \frac{K}{Ts+1} Ts+1K
对比可得:
T=0.5 s T=0.5\text{ s} T=0.5 s
3. 稳态值
c(∞)=4 c(\infty)=4 c(∞)=4
4. 5%误差带调节时间
一阶系统近似公式:
ts≈3T=1.5 s t_s\approx 3T=1.5\text{ s} ts≈3T=1.5 s
第3题
已知:
Φ(s)=25s2+6s+25 \Phi(s)=\frac{25}{s^2+6s+25} Φ(s)=s2+6s+2525
答案
与标准二阶系统形式
Φ(s)=ωn2s2+2ζωns+ωn2 \Phi(s)=\frac{\omega_n^2}{s^2+2\zeta\omega_n s+\omega_n^2} Φ(s)=s2+2ζωns+ωn2ωn2
对比可得:
1. 自然频率
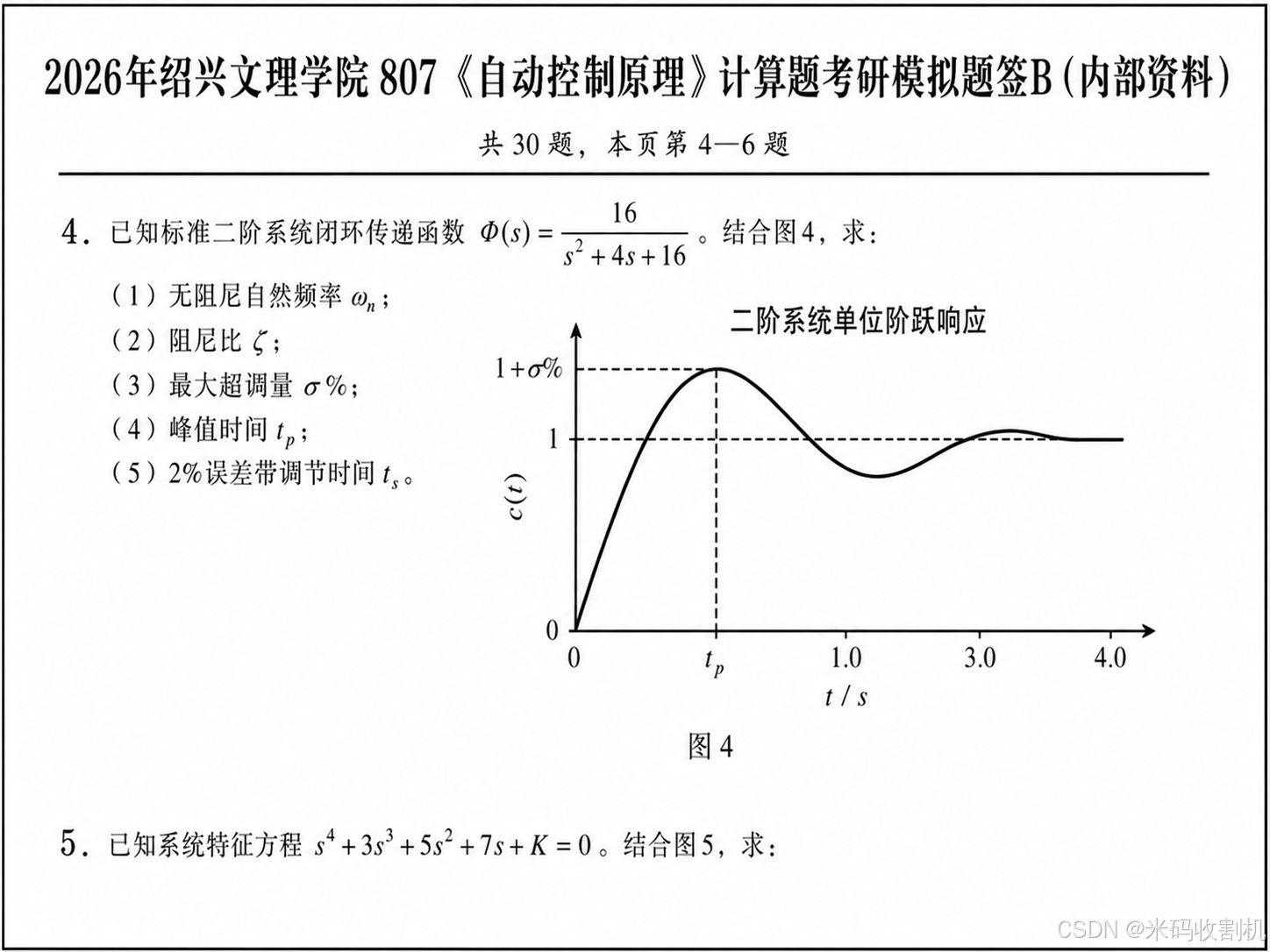
ωn2=25⇒ωn=5 \omega_n^2=25\Rightarrow \omega_n=5 ωn2=25⇒ωn=5
2. 阻尼比
2ζωn=6 2\zeta\omega_n=6 2ζωn=6
代入 ωn=5\omega_n=5ωn=5:
2ζ⋅5=6⇒ζ=0.6 2\zeta\cdot 5=6\Rightarrow \zeta=0.6 2ζ⋅5=6⇒ζ=0.6
3. 超调量
σ%=e−ζπ1−ζ2×100% \sigma\%=e^{-\frac{\zeta\pi}{\sqrt{1-\zeta^2}}}\times 100\% σ%=e−1−ζ2 ζπ×100%
代入 ζ=0.6\zeta=0.6ζ=0.6:
σ%=e−0.6π0.8×100%≈9.48% \sigma\%=e^{-\frac{0.6\pi}{0.8}}\times 100\%\approx 9.48\% σ%=e−0.80.6π×100%≈9.48%
4. 峰值时间
tp=πωn1−ζ2=π5×0.8=π4≈0.785 s t_p=\frac{\pi}{\omega_n\sqrt{1-\zeta^2}} =\frac{\pi}{5\times 0.8} =\frac{\pi}{4} \approx 0.785\text{ s} tp=ωn1−ζ2 π=5×0.8π=4π≈0.785 s
5. 2%误差带调节时间
ts≈4ζωn=40.6×5=43≈1.33 s t_s\approx \frac{4}{\zeta\omega_n} =\frac{4}{0.6\times 5} =\frac{4}{3} \approx 1.33\text{ s} ts≈ζωn4=0.6×54=34≈1.33 s
第4题
已知:
s4+2s3+3s2+4s+K=0 s^4+2s^3+3s^2+4s+K=0 s4+2s3+3s2+4s+K=0
答案
列劳斯表
s413Ks3240s21K0s14−2K00s0K \begin{matrix} s^4 & 1 & 3 & K \\ s^3 & 2 & 4 & 0 \\ s^2 & 1 & K & 0 \\ s^1 & 4-2K & 0 & 0 \\ s^0 & K & & \end{matrix} s4s3s2s1s01214−2KK34K0K000
1. 系统稳定时参数范围
稳定要求首列全正:
1>0,2>0,1>0,4−2K>0,K>0 1>0,\quad 2>0,\quad 1>0,\quad 4-2K>0,\quad K>0 1>0,2>0,1>0,4−2K>0,K>0
故:
0<K<2 0<K<2 0<K<2
2. 当 K=20K=20K=20 时
首列变为:
1, 2, 1, −36, 20 1,\ 2,\ 1,\ -36,\ 20 1, 2, 1, −36, 20
符号变化两次,所以右半平面有 2个根 ,系统 不稳定。
第5题
已知:
G(s)H(s)=K(s+1)s(s+2)(s+4) G(s)H(s)=\frac{K(s+1)}{s(s+2)(s+4)} G(s)H(s)=s(s+2)(s+4)K(s+1)
答案
1. 开环极点和零点
极点:
s=0, −2, −4 s=0,\ -2,\ -4 s=0, −2, −4
零点:
s=−1 s=-1 s=−1
2. 实轴上的根轨迹区段
按"右侧实极点与实零点总数为奇数"判定,可得:
(−4,−2),(−1,0) (-4,-2),\quad (-1,0) (−4,−2),(−1,0)
3. 根轨迹渐近线条数
n−m=3−1=2 n-m=3-1=2 n−m=3−1=2
4. 渐近线与实轴交点
σa=∑pi−∑zin−m=(0−2−4)−(−1)2=−52=−2.5 \sigma_a=\frac{\sum p_i-\sum z_i}{n-m} =\frac{(0-2-4)-(-1)}{2} =\frac{-5}{2} =-2.5 σa=n−m∑pi−∑zi=2(0−2−4)−(−1)=2−5=−2.5
5. 渐近线角度
θk=(2k+1)180∘n−m,k=0,1 \theta_k=\frac{(2k+1)180^\circ}{n-m},\quad k=0,1 θk=n−m(2k+1)180∘,k=0,1
因此:
θ0=90∘,θ1=270∘ \theta_0=90^\circ,\quad \theta_1=270^\circ θ0=90∘,θ1=270∘
第6题
已知:
G(s)=20s(0.1s+1)(0.5s+1) G(s)=\frac{20}{s(0.1s+1)(0.5s+1)} G(s)=s(0.1s+1)(0.5s+1)20
答案
1. 伯德图转折频率
由惯性环节 Ts+1Ts+1Ts+1 的时间常数求倒数:
ω1=10.5=2 rad/s \omega_1=\frac{1}{0.5}=2\text{ rad/s} ω1=0.51=2 rad/s
ω2=10.1=10 rad/s \omega_2=\frac{1}{0.1}=10\text{ rad/s} ω2=0.11=10 rad/s

2. 对数幅频渐近线各段斜率
-
当 0<ω<20<\omega<20<ω<2 时:
−20 dB/dec -20\text{ dB/dec} −20 dB/dec
-
当 2<ω<102<\omega<102<ω<10 时:
−40 dB/dec -40\text{ dB/dec} −40 dB/dec
-
当 ω>10\omega>10ω>10 时:
−60 dB/dec -60\text{ dB/dec} −60 dB/dec
3. 相频特性表达式
φ(ω)=−90∘−arctan(0.5ω)−arctan(0.1ω) \varphi(\omega)=-90^\circ-\arctan(0.5\omega)-\arctan(0.1\omega) φ(ω)=−90∘−arctan(0.5ω)−arctan(0.1ω)
第7题
已知:
G(s)=10s(s+1) G(s)=\frac{10}{s(s+1)} G(s)=s(s+1)10
答案
1. 实部与虚部
令:
s=jω s=j\omega s=jω
则:
G(jω)=10jω(1+jω) G(j\omega)=\frac{10}{j\omega(1+j\omega)} G(jω)=jω(1+jω)10
化简得:
G(jω)=−101+ω2−j10ω(1+ω2) G(j\omega)=-\frac{10}{1+\omega^2}-j\frac{10}{\omega(1+\omega^2)} G(jω)=−1+ω210−jω(1+ω2)10
因此:
ℜG(jω)=−101+ω2 \ReG(j\\omega)=-\frac{10}{1+\omega^2} ℜG(jω)=−1+ω210
ℑG(jω)=−10ω(1+ω2) \ImG(j\\omega)=-\frac{10}{\omega(1+\omega^2)} ℑG(jω)=−ω(1+ω2)10
2. 奈奎斯特曲线主要形状与端点位置
当 ω→0+\omega\to 0^+ω→0+ 时:
ℜ→−10,ℑ→−∞ \Re\to -10,\quad \Im\to -\infty ℜ→−10,ℑ→−∞
当 ω→∞\omega\to \inftyω→∞ 时:
ℜ→0−,ℑ→0− \Re\to 0^-,\quad \Im\to 0^- ℜ→0−,ℑ→0−
所以正频段曲线位于第四象限,并关于实轴对称。
3. 闭环系统稳定性
闭环特征方程:
1+10s(s+1)=0 1+\frac{10}{s(s+1)}=0 1+s(s+1)10=0
即:
s2+s+10=0 s^2+s+10=0 s2+s+10=0
解得:
s=−1±j392 s=\frac{-1\pm j\sqrt{39}}{2} s=2−1±j39
根的实部都为负,因此闭环系统 稳定。
第8题
已知:
G(s)=10s(s+1) G(s)=\frac{10}{s(s+1)} G(s)=s(s+1)10
答案
1. 增益交越频率 ωc\omega_cωc
∣G(jω)∣=10ω1+ω2 |G(j\omega)|=\frac{10}{\omega\sqrt{1+\omega^2}} ∣G(jω)∣=ω1+ω2 10
令:
∣G(jω)∣=1 |G(j\omega)|=1 ∣G(jω)∣=1
则:
10ω1+ω2=1 \frac{10}{\omega\sqrt{1+\omega^2}}=1 ω1+ω2 10=1
解得:
ωc≈3.08 rad/s \omega_c\approx 3.08\text{ rad/s} ωc≈3.08 rad/s
2. 相位裕度
相角公式:
∠G(jω)=−90∘−arctanω \angle G(j\omega)=-90^\circ-\arctan\omega ∠G(jω)=−90∘−arctanω
代入 ωc≈3.08\omega_c\approx 3.08ωc≈3.08:
∠G(jωc)≈−162∘ \angle G(j\omega_c)\approx -162^\circ ∠G(jωc)≈−162∘
故相位裕度:
γ=180∘−162∘≈18∘ \gamma=180^\circ-162^\circ\approx 18^\circ γ=180∘−162∘≈18∘
3. 相角交越频率
令:
−90∘−arctanω=−180∘ -90^\circ-\arctan\omega=-180^\circ −90∘−arctanω=−180∘
只有当 ω→∞\omega\to\inftyω→∞ 时才成立,所以:
无有限相角交越频率
4. 增益裕度
因为无有限相角交越频率,所以:
h=∞ h=\infty h=∞
第9题
已知:
Gc(s)=1+Ts1+0.2Ts G_c(s)=\frac{1+Ts}{1+0.2Ts} Gc(s)=1+0.2Ts1+Ts
答案
设:
α=0.2 \alpha=0.2 α=0.2
1. 零点频率
ωz=1T \omega_z=\frac{1}{T} ωz=T1
2. 极点频率
ωp=1αT=5T \omega_p=\frac{1}{\alpha T}=\frac{5}{T} ωp=αT1=T5
3. 最大超前相角
φm=arcsin(1−α1+α)=arcsin(0.81.2)=arcsin(23)≈41.8∘ \varphi_m=\arcsin\left(\frac{1-\alpha}{1+\alpha}\right) =\arcsin\left(\frac{0.8}{1.2}\right) =\arcsin\left(\frac{2}{3}\right) \approx 41.8^\circ φm=arcsin(1+α1−α)=arcsin(1.20.8)=arcsin(32)≈41.8∘
4. 最大超前相角对应频率
ωm=1Tα=5T \omega_m=\frac{1}{T\sqrt{\alpha}}=\frac{\sqrt{5}}{T} ωm=Tα 1=T5
第10题
已知:
Gc(s)=K,Gp(s)=1s+2,H(s)=1 G_c(s)=K,\quad G_p(s)=\frac{1}{s+2},\quad H(s)=1 Gc(s)=K,Gp(s)=s+21,H(s)=1
答案
由结构图可得:
C(s)=Gp(s)Gc(s)(R(s)−C(s))+W(s) C(s)=G_p(s)\leftG_c(s)(R(s)-C(s))+W(s)\\right C(s)=Gp(s)Gc(s)(R(s)−C(s))+W(s)
代入后:
C(s)=1s+2K(R(s)−C(s))+W(s) C(s)=\frac{1}{s+2}\leftK(R(s)-C(s))+W(s)\\right C(s)=s+21K(R(s)−C(s))+W(s)
整理:
(s+K+2)C(s)=KR(s)+W(s) (s+K+2)C(s)=KR(s)+W(s) (s+K+2)C(s)=KR(s)+W(s)
1. 从 R(s)R(s)R(s) 到 C(s)C(s)C(s) 的闭环传递函数
C(s)R(s)=Ks+K+2 \frac{C(s)}{R(s)}=\frac{K}{s+K+2} R(s)C(s)=s+K+2K
2. 从 W(s)W(s)W(s) 到 C(s)C(s)C(s) 的传递函数
C(s)W(s)=1s+K+2 \frac{C(s)}{W(s)}=\frac{1}{s+K+2} W(s)C(s)=s+K+21
3. 当
R(s)=1s,W(s)=0 R(s)=\frac{1}{s},\quad W(s)=0 R(s)=s1,W(s)=0
时的稳态输出
C(s)=Ks+K+2⋅1s C(s)=\frac{K}{s+K+2}\cdot \frac{1}{s} C(s)=s+K+2K⋅s1
由终值定理:
c(∞)=lims→0sC(s)=KK+2 c(\infty)=\lim_{s\to 0}sC(s)=\frac{K}{K+2} c(∞)=s→0limsC(s)=K+2K
4. 当
R(s)=0,W(s)=1s R(s)=0,\quad W(s)=\frac{1}{s} R(s)=0,W(s)=s1
时的稳态输出
C(s)=1s+K+2⋅1s C(s)=\frac{1}{s+K+2}\cdot \frac{1}{s} C(s)=s+K+21⋅s1
由终值定理:
c(∞)=lims→0sC(s)=1K+2 c(\infty)=\lim_{s\to 0}sC(s)=\frac{1}{K+2} c(∞)=s→0limsC(s)=K+21
答案速查表
| 题号 | 结果 |
|---|---|
| 1 | Φ(s)=10s2+3s+12\Phi(s)=\dfrac{10}{s^2+3s+12}Φ(s)=s2+3s+1210;0型;ess=16e_{ss}=\dfrac{1}{6}ess=61 |
| 2 | c(t)=4(1−e−2t)c(t)=4(1-e^{-2t})c(t)=4(1−e−2t);T=0.5 sT=0.5\text{ s}T=0.5 s;c(∞)=4c(\infty)=4c(∞)=4;ts≈1.5 st_s\approx 1.5\text{ s}ts≈1.5 s |
| 3 | ωn=5\omega_n=5ωn=5;ζ=0.6\zeta=0.6ζ=0.6;σ%≈9.48%\sigma\%\approx 9.48\%σ%≈9.48%;tp≈0.785 st_p\approx 0.785\text{ s}tp≈0.785 s;ts≈1.33 st_s\approx 1.33\text{ s}ts≈1.33 s |
| 4 | 稳定范围:0<K<20<K<20<K<2;当 K=20K=20K=20 时不稳定,右半平面2个根 |
| 5 | 极点:0,−2,−40,-2,-40,−2,−4;零点:−1-1−1;区段:(−4,−2)(-4,-2)(−4,−2)、(−1,0)(-1,0)(−1,0);交点:−2.5-2.5−2.5;角度:90∘,270∘90^\circ,270^\circ90∘,270∘ |
| 6 | 转折频率:2,10 rad/s2,10\text{ rad/s}2,10 rad/s;斜率:−20,−40,−60 dB/dec-20,-40,-60\text{ dB/dec}−20,−40,−60 dB/dec;φ(ω)=−90∘−arctan(0.5ω)−arctan(0.1ω)\varphi(\omega)=-90^\circ-\arctan(0.5\omega)-\arctan(0.1\omega)φ(ω)=−90∘−arctan(0.5ω)−arctan(0.1ω) |
| 7 | ℜ=−101+ω2\Re=-\dfrac{10}{1+\omega^2}ℜ=−1+ω210;ℑ=−10ω(1+ω2)\Im=-\dfrac{10}{\omega(1+\omega^2)}ℑ=−ω(1+ω2)10;闭环稳定 |
| 8 | ωc≈3.08 rad/s\omega_c\approx 3.08\text{ rad/s}ωc≈3.08 rad/s;γ≈18∘\gamma\approx 18^\circγ≈18∘;ωg\omega_gωg 无有限值;h=∞h=\inftyh=∞ |
| 9 | ωz=1T\omega_z=\dfrac{1}{T}ωz=T1;ωp=5T\omega_p=\dfrac{5}{T}ωp=T5;φm≈41.8∘\varphi_m\approx 41.8^\circφm≈41.8∘;ωm=5T\omega_m=\dfrac{\sqrt{5}}{T}ωm=T5 |
| 10 | CR=Ks+K+2\dfrac{C}{R}=\dfrac{K}{s+K+2}RC=s+K+2K;CW=1s+K+2\dfrac{C}{W}=\dfrac{1}{s+K+2}WC=s+K+21;稳态输出分别为 KK+2\dfrac{K}{K+2}K+2K、1K+2\dfrac{1}{K+2}K+21 |
