一、系统简介
血管介入手术机器人测试系统以三坐标机械臂主机、激光扫描头为核心,实现了对医疗手术机器人运动过程中的介入器械控制等性能的测量。系统完全满足YY/T·1994-2025《采用机器人技术的血管介入手术控制系统》标准。包括轴向控制速度、器械轴向位置准确度、轴向最大行程、递送力、旋转控制速度、旋转角度准确度、转扭矩、操作延迟、力检测等项目。
血管介入手术机器人测试系统实现了对血管介入手术机器人运动过程中的轴向位置等参数的测量和计算。系统主要包括三坐标机械臂主机、激光扫描头和分析软件。三坐标机械臂主机和激光扫描头用于静态和动态数据的采集,具有操作简便、部署快速、精度高、可靠性好、灵活全面、效率高等特点。血管介入手术机器人测试系统精度可以达到38um。

血管介入手术机器人测试系统
血管介入手术机器人测试系统测量范围为 1.5-4.5 米,P 系列精度最高可达 0.012mm。该系列采用全球首创的外解耦内置平衡机构和关节双悬支撑结构,有效降低关节负载,提升设备稳定性和操作灵活性。支持 轴扩展,可搭配智能测头,适用血管介入手术的非接触式测量。
系统可实现便捷接触,适配设备基座,无测量盲域,测量范围无损;主轴无限回转,规避外力致损风险。系统通过关节臂固定的臂长,以及 7 个高精度编码器实时记录任意姿态下每个轴的转角,最后精确计算出测头中心在任意位置的坐标值,从而实现工件的检测或逆向工程。分离式手柄设计:切断力耦合通道,提升扫描精度与稳定性。

智能测试探头
二、技术关键点
系统关键参数:
1、测量范围:2.6m;
2、单摆点测试:0.018mm;
3、两点之间的长度误差:0.025mm;
4、接触式测量球体尺寸误差:0.010mm;
5、接触式测量球体形状误差:0.019mm;
6、球体位置直径误差:0.042mm;
7、扫描臂综合精度:0.038mm;
系统优势:
1、简化操作:摆脱传统手动工具,避免现场杂乱,操作更高效;
2、快速部署:数秒完成设置,大幅缩短检测时间;
3、高精度与高可靠:兼具实验室级精度与工业现场耐用性;
4、灵活全面:支持接触与非接触式测量,灵活应对多样检测需求。
5、提升效率:简化测量与扫描流程,助力提高产量与生产效率。
6、品质保障:为检测与质量控制提供理想解决方案。

血管介入手术机器人测试系统应用案例
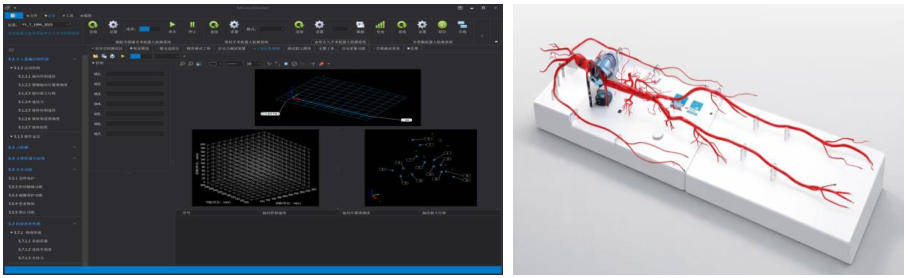
软件测试与仿真平台