目录
[三、方式一:Git 命令拉取 YOLOv5 源码(推荐)](#三、方式一:Git 命令拉取 YOLOv5 源码(推荐))
[四、方式二:无 Git 新手专用(压缩包下载)](#四、方式二:无 Git 新手专用(压缩包下载))
[1. 数据集结构](#1. 数据集结构)
一、前言
从零搭建 YOLOv5 环境,训练口罩识别自定义数据集,适配低配置电脑、CPU 训练,覆盖代码下载、环境配置、数据集部署、训练指令及常见报错解决方案,纯新手可 1:1 复刻,避开版本兼容、路径报错等坑。
二、运行环境
系统:Windows 10 / Windows 11
Python:3.9(兼容性最佳)
工具:PyCharm
设备:纯 CPU 运行(无独立显卡可训练)
框架:YOLOv5 v2.0 稳定版
三、方式一:Git 命令拉取 YOLOv5 源码(推荐)
1.安装 Git:官网下载 https://git-scm.com/download/win,全程默认下一步安装。
2.打开 CMD/PyCharm 终端,切换到项目路径:
python
cd D:\software\Pycharm\yolov53.克隆 YOLOv5 v2.0 版本(直接复制命令):
python
git clone -b v2.0 https://github.com/ultralytics/yolov5.git .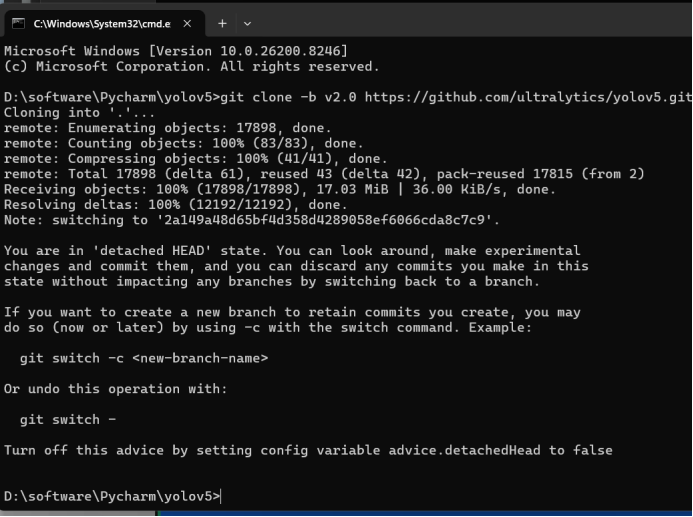
-b v2.0:指定下载 v2.0 稳定版
末尾.:下载到当前文件夹,不新建子目录
四、方式二:无 Git 新手专用(压缩包下载)
- 打开 YOLOv5 GitHub 页面,点击右上角
<>Code,选择 Download ZIP 下载压缩包。 - 解压压缩包,将内部所有文件复制,粘贴覆盖到路径
D:\software\Pycharm\yolov5。 - 确认:目录包含 train.py、requirements.txt、utils、models 即可。
五、安装项目依赖库
-
PyCharm 打开 yolov5 根目录。
-
终端执行一键安装依赖:
pythonpip install -r requirements.txt
六、预训练权重准备
-
下载yolov5s.pt权重文件。
-
将权重文件放置在 yolov5 根目录(与 train.py 同级)。
七、自定义口罩数据集部署
- 数据集结构
在 data 文件夹下新建 MaskDataSet 文件夹,结构如下:
python
data/
└── MaskDataSet/
├── train/
│ ├── images/ # 训练集图片
│ └── labels/ # 训练集标签txt
├── valid/
│ ├── images/ # 验证集图片
│ └── labels/ # 验证集标签txt
└── data.yaml # 数据集配置文件- data.yaml 配置
python
train: data/MaskDataSet/train/images
val: data/MaskDataSet/valid/images
nc: 2
names: ['mask', 'no-mask']- 注意事项
• 图片与标签同名(如 xxx.jpg 对应 xxx.txt),禁止缺失、空标签、特殊字符文件名。
八、完整训练命令
python
--weights yolov5s.pt --data data/MaskDataSet/data.yaml --epochs 100 --batch-size 2 --imgsz 640 --device cpu --name mask_train_exp --cos-lr --patience 30 --noplots参数说明
• --weights yolov5s.pt:加载预训练权重
• --epochs 100:训练总轮数
• --batch-size 2:批次大小,适配低配电脑
• --device cpu:CPU 训练
• --cos-lr:余弦学习率,收敛更好
• --patience 30:早停机制,防止过拟合
九、兼容报错修复(关键)
新版本 numpy 移除np.int,需修改 2 个文件 3 处代码:
-
utils/datasets.py:全局替换所有np.int为int -
utils/utils.py第 139 行python# 原代码 classes = labels[:, 0].astype(np.int) # 修改后 classes = labels[:, 0].astype(int) -
KeyError 报错:删除 train/valid 目录下所有labels.cache缓存文件,重新运行。
十、训练过程与结果
-
启动后自动扫描数据集,显示模型结构、参数,逐轮训练。
-
实时输出损失值(GIoU、obj、cls、total),损失越低效果越好。
-
每轮验证输出 Precision、Recall、mAP@0.5(核心指标)。
-
训练完成后,结果保存至 runs/train/mask_train_exp/,核心文件:
◦ best.pt:最优模型(推荐用于检测)
◦ last.pt:最后一轮模型
◦ results.png:损失 / 精度曲线图
train.py代码:
python
import argparse
import torch.distributed as dist
import torch.nn.functional as F
import torch.optim as optim
import torch.optim.lr_scheduler as lr_scheduler
import torch.utils.data
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.utils.tensorboard import SummaryWriter
import test # import test.py to get mAP after each epoch
from models.yolo import Model
from utils import google_utils
from utils.datasets import *
from utils.utils import *
mixed_precision = True
try: # Mixed precision training https://github.com/NVIDIA/apex
from apex import amp
except:
print('Apex recommended for faster mixed precision training: https://github.com/NVIDIA/apex')
mixed_precision = False # not installed
# Hyperparameters
hyp = {'optimizer': 'SGD', # ['adam', 'SGD', None] if none, default is SGD
'lr0': 0.01, # initial learning rate (SGD=1E-2, Adam=1E-3)
'momentum': 0.937, # SGD momentum/Adam beta1
'weight_decay': 5e-4, # optimizer weight decay
'giou': 0.05, # giou loss gain
'cls': 0.5, # cls loss gain
'cls_pw': 1.0, # cls BCELoss positive_weight
'obj': 1.0, # obj loss gain (*=img_size/320 if img_size != 320)
'obj_pw': 1.0, # obj BCELoss positive_weight
'iou_t': 0.20, # iou training threshold
'anchor_t': 4.0, # anchor-multiple threshold
'fl_gamma': 0.0, # focal loss gamma (efficientDet default is gamma=1.5)
'hsv_h': 0.015, # image HSV-Hue augmentation (fraction)
'hsv_s': 0.7, # image HSV-Saturation augmentation (fraction)
'hsv_v': 0.4, # image HSV-Value augmentation (fraction)
'degrees': 0.0, # image rotation (+/- deg)
'translate': 0.0, # image translation (+/- fraction)
'scale': 0.5, # image scale (+/- gain)
'shear': 0.0} # image shear (+/- deg)
def train(hyp, tb_writer, opt, device):
print(f'Hyperparameters {hyp}')
log_dir = tb_writer.log_dir if tb_writer else 'runs/evolution' # run directory
wdir = str(Path(log_dir) / 'weights') + os.sep # weights directory
os.makedirs(wdir, exist_ok=True)
last = wdir + 'last.pt'
best = wdir + 'best.pt'
results_file = log_dir + os.sep + 'results.txt'
epochs, batch_size, total_batch_size, weights, rank = \
opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.local_rank
# TODO: Init DDP logging. Only the first process is allowed to log.
# Since I see lots of print here, the logging configuration is skipped here. We may see repeated outputs.
# Save run settings
with open(Path(log_dir) / 'hyp.yaml', 'w') as f:
yaml.dump(hyp, f, sort_keys=False)
with open(Path(log_dir) / 'opt.yaml', 'w') as f:
yaml.dump(vars(opt), f, sort_keys=False)
# Configure
init_seeds(2 + rank)
with open(opt.data) as f:
data_dict = yaml.load(f, Loader=yaml.FullLoader) # model dict
train_path = data_dict['train']
test_path = data_dict['val']
nc, names = (1, ['item']) if opt.single_cls else (int(data_dict['nc']), data_dict['names']) # number classes, names
assert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check
# Remove previous results
if rank in [-1, 0]:
for f in glob.glob('*_batch*.jpg') + glob.glob(results_file):
os.remove(f)
# Create model
model = Model(opt.cfg, nc=nc).to(device)
# Image sizes
gs = int(max(model.stride)) # grid size (max stride)
imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples
# Optimizer
nbs = 64 # nominal batch size
# default DDP implementation is slow for accumulation according to: https://pytorch.org/docs/stable/notes/ddp.html
# all-reduce operation is carried out during loss.backward().
# Thus, there would be redundant all-reduce communications in a accumulation procedure,
# which means, the result is still right but the training speed gets slower.
# TODO: If acceleration is needed, there is an implementation of allreduce_post_accumulation
# in https://github.com/NVIDIA/DeepLearningExamples/blob/master/PyTorch/LanguageModeling/BERT/run_pretraining.py
accumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizing
hyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decay
pg0, pg1, pg2 = [], [], [] # optimizer parameter groups
for k, v in model.named_parameters():
if v.requires_grad:
if '.bias' in k:
pg2.append(v) # biases
elif '.weight' in k and '.bn' not in k:
pg1.append(v) # apply weight decay
else:
pg0.append(v) # all else
if hyp['optimizer'] == 'adam': # https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLR
optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentum
else:
optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)
optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decay
optimizer.add_param_group({'params': pg2}) # add pg2 (biases)
print('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))
del pg0, pg1, pg2
# Load Model
with torch_distributed_zero_first(rank):
google_utils.attempt_download(weights)
start_epoch, best_fitness = 0, 0.0
if weights.endswith('.pt'): # pytorch format
ckpt = torch.load(weights, map_location=device) # load checkpoint
# load model
try:
exclude = ['anchor'] # exclude keys
ckpt['model'] = {k: v for k, v in ckpt['model'].float().state_dict().items()
if k in model.state_dict() and not any(x in k for x in exclude)
and model.state_dict()[k].shape == v.shape}
model.load_state_dict(ckpt['model'], strict=False)
print('Transferred %g/%g items from %s' % (len(ckpt['model']), len(model.state_dict()), weights))
except KeyError as e:
s = "%s is not compatible with %s. This may be due to model differences or %s may be out of date. " \
"Please delete or update %s and try again, or use --weights '' to train from scratch." \
% (weights, opt.cfg, weights, weights)
raise KeyError(s) from e
# load optimizer
if ckpt['optimizer'] is not None:
optimizer.load_state_dict(ckpt['optimizer'])
best_fitness = ckpt['best_fitness']
# load results
if ckpt.get('training_results') is not None:
with open(results_file, 'w') as file:
file.write(ckpt['training_results']) # write results.txt
# epochs
start_epoch = ckpt['epoch'] + 1
if epochs < start_epoch:
print('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %
(weights, ckpt['epoch'], epochs))
epochs += ckpt['epoch'] # finetune additional epochs
del ckpt
# Mixed precision training https://github.com/NVIDIA/apex
if mixed_precision:
model, optimizer = amp.initialize(model, optimizer, opt_level='O1', verbosity=0)
# Scheduler https://arxiv.org/pdf/1812.01187.pdf
lf = lambda x: (((1 + math.cos(x * math.pi / epochs)) / 2) ** 1.0) * 0.8 + 0.2 # cosine
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
# https://discuss.pytorch.org/t/a-problem-occured-when-resuming-an-optimizer/28822
# plot_lr_scheduler(optimizer, scheduler, epochs)
# DP mode
if device.type != 'cpu' and rank == -1 and torch.cuda.device_count() > 1:
model = torch.nn.DataParallel(model)
# SyncBatchNorm
if opt.sync_bn and device.type != 'cpu' and rank != -1:
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
print('Using SyncBatchNorm()')
# Exponential moving average
ema = torch_utils.ModelEMA(model) if rank in [-1, 0] else None
# DDP mode
if device.type != 'cpu' and rank != -1:
model = DDP(model, device_ids=[rank], output_device=rank)
# Trainloader
dataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt, hyp=hyp, augment=True,
cache=opt.cache_images, rect=opt.rect, local_rank=rank,
world_size=opt.world_size)
mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label class
nb = len(dataloader) # number of batches
assert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)
# Testloader
if rank in [-1, 0]:
# local_rank is set to -1. Because only the first process is expected to do evaluation.
testloader = create_dataloader(test_path, imgsz_test, total_batch_size, gs, opt, hyp=hyp, augment=False,
cache=opt.cache_images, rect=True, local_rank=-1, world_size=opt.world_size)[0]
# Model parameters
hyp['cls'] *= nc / 80. # scale coco-tuned hyp['cls'] to current dataset
model.nc = nc # attach number of classes to model
model.hyp = hyp # attach hyperparameters to model
model.gr = 1.0 # giou loss ratio (obj_loss = 1.0 or giou)
model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) # attach class weights
model.names = names
# Class frequency
if rank in [-1, 0]:
labels = np.concatenate(dataset.labels, 0)
c = torch.tensor(labels[:, 0]) # classes
# cf = torch.bincount(c.long(), minlength=nc) + 1.
# model._initialize_biases(cf.to(device))
plot_labels(labels, save_dir=log_dir)
if tb_writer:
# tb_writer.add_hparams(hyp, {}) # causes duplicate https://github.com/ultralytics/yolov5/pull/384
tb_writer.add_histogram('classes', c, 0)
# Check anchors
if not opt.noautoanchor:
check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)
# Start training
t0 = time.time()
nw = max(3 * nb, 1e3) # number of warmup iterations, max(3 epochs, 1k iterations)
maps = np.zeros(nc) # mAP per class
results = (0, 0, 0, 0, 0, 0, 0) # 'P', 'R', 'mAP', 'F1', 'val GIoU', 'val Objectness', 'val Classification'
scheduler.last_epoch = start_epoch - 1 # do not move
if rank in [0, -1]:
print('Image sizes %g train, %g test' % (imgsz, imgsz_test))
print('Using %g dataloader workers' % dataloader.num_workers)
print('Starting training for %g epochs...' % epochs)
# torch.autograd.set_detect_anomaly(True)
for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
model.train()
# Update image weights (optional)
# When in DDP mode, the generated indices will be broadcasted to synchronize dataset.
if dataset.image_weights:
# Generate indices.
if rank in [-1, 0]:
w = model.class_weights.cpu().numpy() * (1 - maps) ** 2 # class weights
image_weights = labels_to_image_weights(dataset.labels, nc=nc, class_weights=w)
dataset.indices = random.choices(range(dataset.n), weights=image_weights,
k=dataset.n) # rand weighted idx
# Broadcast.
if rank != -1:
indices = torch.zeros([dataset.n], dtype=torch.int)
if rank == 0:
indices[:] = torch.from_tensor(dataset.indices, dtype=torch.int)
dist.broadcast(indices, 0)
if rank != 0:
dataset.indices = indices.cpu().numpy()
# Update mosaic border
# b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)
# dataset.mosaic_border = [b - imgsz, -b] # height, width borders
mloss = torch.zeros(4, device=device) # mean losses
if rank != -1:
dataloader.sampler.set_epoch(epoch)
pbar = enumerate(dataloader)
if rank in [-1, 0]:
print(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'GIoU', 'obj', 'cls', 'total', 'targets', 'img_size'))
pbar = tqdm(pbar, total=nb) # progress bar
optimizer.zero_grad()
for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------
ni = i + nb * epoch # number integrated batches (since train start)
imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0 - 255 to 0.0 - 1.0
# Warmup
if ni <= nw:
xi = [0, nw] # x interp
# model.gr = np.interp(ni, xi, [0.0, 1.0]) # giou loss ratio (obj_loss = 1.0 or giou)
accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())
for j, x in enumerate(optimizer.param_groups):
# bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
x['lr'] = np.interp(ni, xi, [0.1 if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])
if 'momentum' in x:
x['momentum'] = np.interp(ni, xi, [0.9, hyp['momentum']])
# Multi-scale
if opt.multi_scale:
sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
sf = sz / max(imgs.shape[2:]) # scale factor
if sf != 1:
ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)
# Forward
pred = model(imgs)
# Loss
loss, loss_items = compute_loss(pred, targets.to(device), model) # scaled by batch_size
if rank != -1:
loss *= opt.world_size # gradient averaged between devices in DDP mode
if not torch.isfinite(loss):
print('WARNING: non-finite loss, ending training ', loss_items)
return results
# Backward
if mixed_precision:
with amp.scale_loss(loss, optimizer) as scaled_loss:
scaled_loss.backward()
else:
loss.backward()
# Optimize
if ni % accumulate == 0:
optimizer.step()
optimizer.zero_grad()
if ema is not None:
ema.update(model)
# Print
if rank in [-1, 0]:
mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
mem = '%.3gG' % (torch.cuda.memory_cached() / 1E9 if torch.cuda.is_available() else 0) # (GB)
s = ('%10s' * 2 + '%10.4g' * 6) % (
'%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])
pbar.set_description(s)
# Plot
if ni < 3:
f = str(Path(log_dir) / ('train_batch%g.jpg' % ni)) # filename
result = plot_images(images=imgs, targets=targets, paths=paths, fname=f)
if tb_writer and result is not None:
tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)
# tb_writer.add_graph(model, imgs) # add model to tensorboard
# end batch ------------------------------------------------------------------------------------------------
# Scheduler
scheduler.step()
# Only the first process in DDP mode is allowed to log or save checkpoints.
if rank in [-1, 0]:
# mAP
if ema is not None:
ema.update_attr(model, include=['yaml', 'nc', 'hyp', 'gr', 'names', 'stride'])
final_epoch = epoch + 1 == epochs
if not opt.notest or final_epoch: # Calculate mAP
results, maps, times = test.test(opt.data,
batch_size=total_batch_size,
imgsz=imgsz_test,
save_json=final_epoch and opt.data.endswith(os.sep + 'coco.yaml'),
model=ema.ema.module if hasattr(ema.ema, 'module') else ema.ema,
single_cls=opt.single_cls,
dataloader=testloader,
save_dir=log_dir)
# Write
with open(results_file, 'a') as f:
f.write(s + '%10.4g' * 7 % results + '\n') # P, R, mAP, F1, test_losses=(GIoU, obj, cls)
if len(opt.name) and opt.bucket:
os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))
# Tensorboard
if tb_writer:
tags = ['train/giou_loss', 'train/obj_loss', 'train/cls_loss',
'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95',
'val/giou_loss', 'val/obj_loss', 'val/cls_loss']
for x, tag in zip(list(mloss[:-1]) + list(results), tags):
tb_writer.add_scalar(tag, x, epoch)
# Update best mAP
fi = fitness(np.array(results).reshape(1, -1)) # fitness_i = weighted combination of [P, R, mAP, F1]
if fi > best_fitness:
best_fitness = fi
# Save model
save = (not opt.nosave) or (final_epoch and not opt.evolve)
if save:
with open(results_file, 'r') as f: # create checkpoint
ckpt = {'epoch': epoch,
'best_fitness': best_fitness,
'training_results': f.read(),
'model': ema.ema.module if hasattr(ema, 'module') else ema.ema,
'optimizer': None if final_epoch else optimizer.state_dict()}
# Save last, best and delete
torch.save(ckpt, last)
if (best_fitness == fi) and not final_epoch:
torch.save(ckpt, best)
del ckpt
# end epoch ----------------------------------------------------------------------------------------------------
# end training
if rank in [-1, 0]:
# Strip optimizers
n = ('_' if len(opt.name) and not opt.name.isnumeric() else '') + opt.name
fresults, flast, fbest = 'results%s.txt' % n, wdir + 'last%s.pt' % n, wdir + 'best%s.pt' % n
for f1, f2 in zip([wdir + 'last.pt', wdir + 'best.pt', 'results.txt'], [flast, fbest, fresults]):
if os.path.exists(f1):
os.rename(f1, f2) # rename
ispt = f2.endswith('.pt') # is *.pt
strip_optimizer(f2) if ispt else None # strip optimizer
os.system('gsutil cp %s gs://%s/weights' % (f2, opt.bucket)) if opt.bucket and ispt else None # upload
# Finish
if not opt.evolve:
plot_results(save_dir=log_dir) # save as results.png
print('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))
dist.destroy_process_group() if rank not in [-1, 0] else None
torch.cuda.empty_cache()
return results
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--cfg', type=str, default='models/yolov5s.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
parser.add_argument('--hyp', type=str, default='', help='hyp.yaml path (optional)')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16, help="Total batch size for all gpus.")
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='train,test sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', nargs='?', const='get_last', default=False,
help='resume from given path/to/last.pt, or most recent run if blank.')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--weights', type=str, default='', help='initial weights path')
parser.add_argument('--name', default='', help='renames results.txt to results_name.txt if supplied')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
opt = parser.parse_args()
last = get_latest_run() if opt.resume == 'get_last' else opt.resume # resume from most recent run
if last and not opt.weights:
print(f'Resuming training from {last}')
opt.weights = last if opt.resume and not opt.weights else opt.weights
if opt.local_rank in [-1, 0]:
check_git_status()
opt.cfg = check_file(opt.cfg) # check file
opt.data = check_file(opt.data) # check file
if opt.hyp: # update hyps
opt.hyp = check_file(opt.hyp) # check file
with open(opt.hyp) as f:
hyp.update(yaml.load(f, Loader=yaml.FullLoader)) # update hyps
opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
device = torch_utils.select_device(opt.device, apex=mixed_precision, batch_size=opt.batch_size)
opt.total_batch_size = opt.batch_size
opt.world_size = 1
if device.type == 'cpu':
mixed_precision = False
elif opt.local_rank != -1:
# DDP mode
assert torch.cuda.device_count() > opt.local_rank
torch.cuda.set_device(opt.local_rank)
device = torch.device("cuda", opt.local_rank)
dist.init_process_group(backend='nccl', init_method='env://') # distributed backend
opt.world_size = dist.get_world_size()
assert opt.batch_size % opt.world_size == 0, "Batch size is not a multiple of the number of devices given!"
opt.batch_size = opt.total_batch_size // opt.world_size
print(opt)
# Train
if not opt.evolve:
if opt.local_rank in [-1, 0]:
print('Start Tensorboard with "tensorboard --logdir=runs", view at http://localhost:6006/')
tb_writer = SummaryWriter(log_dir=increment_dir('runs/exp', opt.name))
else:
tb_writer = None
train(hyp, tb_writer, opt, device)
# Evolve hyperparameters (optional)
else:
assert opt.local_rank == -1, "DDP mode currently not implemented for Evolve!"
tb_writer = None
opt.notest, opt.nosave = True, True # only test/save final epoch
if opt.bucket:
os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
for _ in range(10): # generations to evolve
if os.path.exists('evolve.txt'): # if evolve.txt exists: select best hyps and mutate
# Select parent(s)
parent = 'single' # parent selection method: 'single' or 'weighted'
x = np.loadtxt('evolve.txt', ndmin=2)
n = min(5, len(x)) # number of previous results to consider
x = x[np.argsort(-fitness(x))][:n] # top n mutations
w = fitness(x) - fitness(x).min() # weights
if parent == 'single' or len(x) == 1:
# x = x[random.randint(0, n - 1)] # random selection
x = x[random.choices(range(n), weights=w)[0]] # weighted selection
elif parent == 'weighted':
x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
# Mutate
mp, s = 0.9, 0.2 # mutation probability, sigma
npr = np.random
npr.seed(int(time.time()))
g = np.array([1, 1, 1, 1, 1, 1, 1, 0, .1, 1, 0, 1, 1, 1, 1, 1, 1, 1]) # gains
ng = len(g)
v = np.ones(ng)
while all(v == 1): # mutate until a change occurs (prevent duplicates)
v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
hyp[k] = x[i + 7] * v[i] # mutate
# Clip to limits
keys = ['lr0', 'iou_t', 'momentum', 'weight_decay', 'hsv_s', 'hsv_v', 'translate', 'scale', 'fl_gamma']
limits = [(1e-5, 1e-2), (0.00, 0.70), (0.60, 0.98), (0, 0.001), (0, .9), (0, .9), (0, .9), (0, .9), (0, 3)]
for k, v in zip(keys, limits):
hyp[k] = np.clip(hyp[k], v[0], v[1])
# Train mutation
results = train(hyp.copy(), tb_writer, opt, device)
# Write mutation results
print_mutation(hyp, results, opt.bucket)
# Plot results
# plot_evolution_results(hyp)训练跑完了所有轮次
bash
Epoch 99/99 # 最后一轮!100 轮全部跑完
100 epochs completed in 1.945 hours. # 明确告诉你:100轮训练完成!模型自动保存成功
bash
Optimizer stripped from runs\exp13_mask_train_exp\weights\best_mask_train_exp.pt
Optimizer stripped from runs\exp13_mask_train_exp\weights\last_mask_train_exp.pt生成了 best_mask_train_exp.pt(效果最好的模型)
生成了 last_mask_train_exp.pt(最后一轮模型)
bash
mAP@.5: 0.865 → 口罩检测准确率 86.5% R: 0.883 → 召回率 88.3%损失值极低,模型收敛完美
bash
total 0.08287模型保存在
bash
yolov5\runs\exp13_mask_train_exp\weights\数据:小数据集
设备:纯 CPU
结果:精度 86.5%,100 轮完美跑完
产出:可用的检测模型已生成
现在可以直接用这个模型做口罩检测了
十一、训练闪退解决方案
-
PyCharm 设置:勾选「模拟终端运行」,防止窗口自动关闭
-
代码修改:在 train.py 末尾添加:
pythoninput("训练全部完成,按下回车键退出!") -
低配电脑:将--batch-size改为 1,降低内存占用。
十二、常见问题汇总
-
numpy has no attribute 'int':全局替换np.int为int
-
数据集不存在 / KeyError:删除.cache缓存,检查 yaml 路径
-
CPU 训练太慢:正常现象,耐心等待即可
-
标签异常 / 识别失败:检查标签格式、图片与标签是否一一对应
十三、总结
-
选用 YOLOv5 v2.0 可避开大部分版本兼容坑,适合新手。
-
严格遵循数据集结构和路径规范,避免中文、空格。
-
提前修复 numpy 语法,可杜绝 90% 运行报错。
-
低配电脑用 CPU + 小批次训练,训练完成后用best.pt实现口罩检测部署,可用于课程设计、毕设。