无人机航拍街道巡检数据集 | 空中视角车辆检测、交通流量统计、违停识别、智能交通YOLO数据集10399期
摘要:一套面向无人机低空航拍街道场景的车辆目标检测开源数据集,采用行业通用标注格式,全面适配YOLO系列等主流深度学习目标检测框架。可落地空中视角车辆识别、城市街道巡检、交通流量统计、车辆违停抓拍、智能交通管控等业务场景,样本体量充足、场景贴合实战,能够快速支撑算法训练、模型微调、工程部署与学术研究。
标签:#无人机街道巡检 #航拍车辆检测 #智能交通 #车辆目标检测 #YOLO数据集 #交通流量统计 #车辆违停识别 #空中视角CV #深度学习目标检测 #低空航拍视觉
传统城市交通巡检、车辆违停排查、道路流量统计长期依赖路面摄像头与人工巡逻。地面摄像头存在视野受限、易被遮挡、监控盲区多等问题;人工巡查覆盖范围小、效率低下,面对城市大范围路网、背街小巷、园区道路时,人力成本与时间成本居高不下,且难以实现全天候、高频次动态监测。
无人机凭借高空俯视、机动灵活、视野广阔 的优势,逐步成为现代交通管理的核心巡检设备。但航拍俯视视角下车辆属于典型小目标,车身形态、轮廓特征与地面视角差异极大,通用地面车辆检测模型直接迁移会出现漏检、误检、定位不准等问题。目前行业内高质量无人机航拍车辆标注数据集稀缺,成为制约空中视角交通AI算法落地的核心瓶颈。
本次分享的航拍街道车辆目标检测数据集,基于真实无人机巡检画面采集标注,聚焦主流民用车辆类型,样本数量充足、标注规范、场景丰富,可有效解决空中视角车辆检测算法训练难、泛化能力弱的痛点,助力智能交通、无人机安防巡检项目快速落地。

二、数据集整体介绍
2.1 核心基础信息
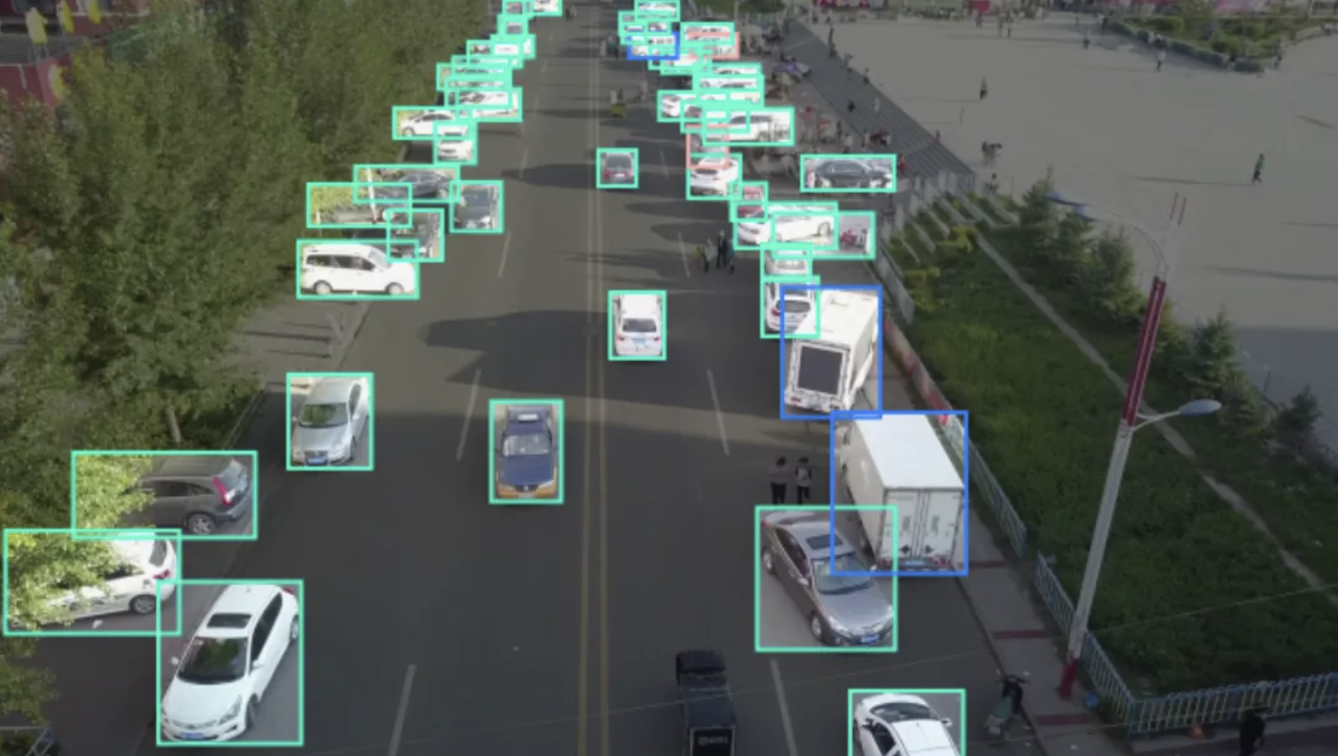
本数据集为目标检测专用数据集,全部数据来源于无人机低空航拍街道实景,适配俯视、斜俯视等无人机常规拍摄角度,专为空中视角车辆识别场景打造。
- 检测类别:共划分4类道路主流车辆目标,分别为公交车(bus)、普通汽车(car)、卡车(truck)、厢式货车(van),类别划分精简实用,无冗余标签,精准匹配城市道路巡检业务需求,减少无效特征干扰。
- 数据规模 :总计8626张高清标注图像,样本体量在中小型目标检测数据集中优势突出。充足的样本能够有效抑制模型过拟合,既可以从零训练全新检测模型,也可用于商用模型、开源模型的微调、性能对比与算法验证。
- 标注格式:采用目标检测领域通用标准标注格式,图像与标签一一对应,无需额外格式转换,可直接对接 YOLO、Faster R-CNN、SSD、RTMDet 等主流深度学习框架,降低数据预处理成本。
- 场景适配 :数据覆盖城市主干道、居民区道路、城郊街道等多元场景,包含车流密集、车辆稀疏、部分遮挡等真实路况,高度还原无人机日常巡检工况。

2.2 核心应用价值
- 算法研发与迭代:为空中视角车辆检测算法提供标准化训练样本,支持研究者优化网络结构、调试超参数、对比不同检测模型性能,提升模型在航拍场景下的鲁棒性。
- 无人机交通巡检:搭载至巡检无人机,实现街道车辆自动识别、违规停车智能抓拍,替代人工完成大范围路网巡检,提升交通管理效率。
- 交通大数据分析:基于检测结果统计道路车流量、车型分布,为城市路网规划、交通疏导、潮汐车流分析提供数据支撑。
- 模型泛化能力提升:弥补地面视角车辆数据集的场景缺陷,专门针对航拍俯视小目标做数据补充,强化模型在低空视觉场景下的适配能力。
2.3 数据集核心优势
- 视角专属:原生无人机航拍俯视视角,针对性解决空中小目标检测难题,区别于常规地面监控数据集;
- 样本充足:8626张图像覆盖多路况、多车流密度,抗过拟合能力强,适配从零训练、模型微调等多种使用场景;
- 工程友好:标准标注格式,全主流CV框架兼容,开箱即用,适合企业原型开发、高校实训、算法竞赛;
- 类别精简:仅保留道路核心4类车型,聚焦业务本身,降低模型分类压力,提升推理速度,便于边缘设备部署。
三、深度学习实战代码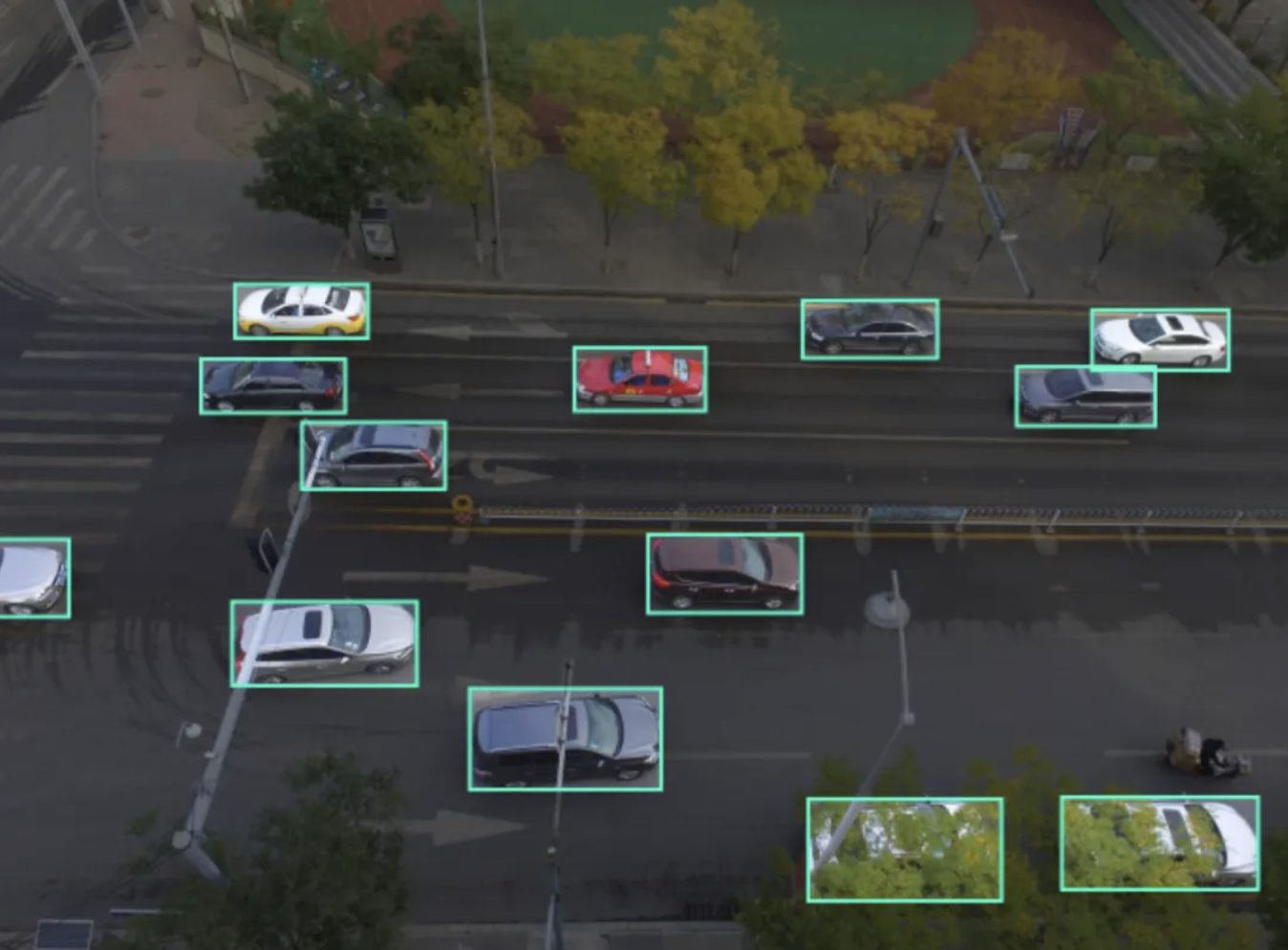
基于工业界无人机检测主流框架 YOLOv8 编写全套代码,包含环境部署、数据集配置、模型训练、图像/视频推理、模型精度验证全流程,所有代码结合航拍小目标、车辆密集遮挡、俯视视角等场景做参数调优与经验注释。
3.1 运行环境依赖安装
适配 Python 3.8 ~ 3.11,支持 Windows / Linux 系统,CUDA 10.2 及以上版本,普通独立显卡即可完成训练。
bash
# 安装YOLOv8核心框架(无人机目标检测主流框架)
pip install ultralytics==8.2.0
# 图像处理、数值计算基础库
pip install opencv-python numpy pillow
# 数据增强库:解决航拍光照变化、车辆遮挡问题
pip install albumentations
# 进度条工具,方便查看训练状态
pip install tqdm3.2 数据集标准目录结构(YOLO通用格式)
遵循YOLO系列标准目录规范,解压后无需重构路径,图像与标签文件名称一一对应:
drone_traffic_dataset/
├── images/ # 航拍原图(总计8626张)
│ ├── train/ # 训练集图像
│ ├── val/ # 验证集图像
│ └── test/ # 测试集图像
├── labels/ # 目标检测标签文件
│ ├── train/
│ ├── val/
│ └── test/
└── traffic.yaml # 数据集配置文件(路径、类别、增强策略)3.3 数据集配置文件 traffic.yaml
针对4类航拍车辆编写配置文件,结合街道航拍场景定制数据增强策略:
yaml
# 无人机航拍街道车辆检测 - YOLO数据集配置文件
# 数据集根目录,根据本地实际路径修改
path: ./drone_traffic_dataset
# 训练、验证、测试集图像子路径
train: images/train
val: images/val
test: images/test
# 目标类别总数:4类车辆
nc: 4
# 类别名称映射(严格匹配标注顺序)
names:
0: 公交车
1: 汽车
2: 卡车
3: 厢式货车
# 航拍场景专属数据增强(适配俯视视角、光照变化、车辆密集场景)
fliplr: 0.5 # 左右翻转,适配不同走向街道
mosaic: 0.9 # Mosaic增强,提升航拍小车辆目标检测精度
hsv_s: 0.6 # 饱和度调整,削弱强光、阴影对车辆特征的干扰
mixup: 0.1 # 少量mixup,提升密集车流场景模型稳定性3.4 模型训练脚本 train_traffic.py
结合8626张大样本体量、航拍小目标、车辆遮挡等特性定制超参,代码附带场景化注释:
python
"""
无人机航拍街道车辆检测 - YOLOv8训练脚本
数据集规模:8626张航拍图像
适配场景:高空俯视小目标、密集车流、车辆局部遮挡、多路况街道巡检
核心优化:小目标增强、遮挡场景NMS调优、大样本稳定训练
"""
from ultralytics import YOLO
def train_drone_vehicle():
# 选用YOLOv8n轻量化模型,兼顾精度与推理速度,适配无人机边缘部署
# 航拍设备算力有限,优先轻量模型,方便后续机载端部署
model = YOLO("yolov8n.pt")
# 启动训练,超参针对航拍交通场景深度定制
train_results = model.train(
data="./drone_traffic_dataset/traffic.yaml", # 绑定数据集配置文件
epochs=120, # 8626张大样本,设置120轮充分收敛
imgsz=640, # 输入图像尺寸,适配航拍宽画幅与小目标
batch=24, # 8G及以上显存推荐24,充分利用算力
workers=6, # 多线程加载数据,提升训练效率
device=0, # 使用GPU训练,无GPU改为 device="cpu"
patience=20, # 早停机制:20轮无精度提升停止,防止过拟合
conf=0.2, # 降低置信度阈值,避免航拍小车辆漏检
iou=0.4, # 密集车流场景调低IOU,解决车辆重叠遮挡漏检问题
box=7.5, # 提升检测框损失权重,优化俯视车辆定位精度
cls=0.5, # 分类损失权重,平衡四类车型分类效果
project="runs/train", # 训练结果保存根目录
name="drone_traffic_det",# 本次训练任务名称
exist_ok=True,
seed=42 # 固定随机种子,保证实验可复现
)
print(f"训练完成!最优权重保存路径:{train_results.save_dir}")
if __name__ == "__main__":
train_drone_vehicle()3.5 图像推理脚本 predict_image.py
对单张/批量航拍图像执行车辆检测,可视化检测结果,适配街道巡检、违停识别等离线分析场景:
python
"""
航拍车辆检测 - 图像推理脚本
功能:批量解析无人机航拍图像、标注车辆类别与位置、结果可视化
落地场景:街道巡检图像复盘、违停车辆筛查、车流量离线统计
"""
from ultralytics import YOLO
import cv2
import os
# 全局参数配置
WEIGHT_PATH = "./runs/train/drone_traffic_det/weights/best.pt" # 训练最优权重
TEST_IMG_PATH = "./drone_traffic_dataset/images/test" # 测试图像目录
SAVE_RESULT_PATH = "./detect_result" # 结果保存目录
os.makedirs(SAVE_RESULT_PATH, exist_ok=True)
# 加载训练完成的模型
model = YOLO(WEIGHT_PATH)
def batch_detect_images():
# 遍历所有测试图像
for img_file in os.listdir(TEST_IMG_PATH):
if img_file.endswith((".jpg", ".png", ".jpeg")):
img_full_path = os.path.join(TEST_IMG_PATH, img_file)
# 模型推理:适配航拍小目标,调低置信度
results = model.predict(
source=img_full_path,
imgsz=640,
conf=0.2,
iou=0.4,
save=False,
line_width=2 # 加宽检测框,航拍大图显示更清晰
)
# 绘制检测结果并保存
for res in results:
plot_img = res.plot()
save_full_path = os.path.join(SAVE_RESULT_PATH, img_file)
cv2.imwrite(save_full_path, plot_img)
print(f"批量图像检测完成,结果已存放至:{SAVE_RESULT_PATH}")
if __name__ == "__main__":
batch_detect_images()3.6 视频流推理脚本 predict_video.py
适配无人机实时回传视频流,实现动态视频车辆检测,模拟机载实时巡检场景:
python
"""
航拍车辆检测 - 视频流推理脚本
功能:解析无人机实时视频/本地视频,动态检测车辆
落地场景:无人机实时街道巡检、动态车流量监测
"""
from ultralytics import YOLO
import cv2
# 加载模型
model = YOLO("./runs/train/drone_traffic_det/weights/best.pt")
# 视频路径:填写本地视频路径,或填写 0 调用电脑摄像头模拟实时流
VIDEO_SOURCE = "./drone_traffic_video.mp4"
def detect_video_stream():
cap = cv2.VideoCapture(VIDEO_SOURCE)
# 获取视频帧率、分辨率
fps = int(cap.get(cv2.CAP_PROP_FPS))
print(f"视频帧率:{fps}")
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
# 逐帧推理
results = model(frame, conf=0.2, iou=0.4)
frame_result = results[0].plot()
# 实时展示检测画面
cv2.imshow("Drone Traffic Detection", frame_result)
# 按ESC退出播放
if cv2.waitKey(1) & 0xFF == 27:
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
detect_video_stream()3.7 模型精度验证脚本 val_model.py
计算模型mAP、精确率、召回率等核心指标,用于算法评估与版本迭代:
python
"""
航拍车辆检测模型精度验证脚本
作用:评估模型在四类车辆、航拍小目标、遮挡场景下的综合性能
"""
from ultralytics import YOLO
# 加载最优模型权重
model = YOLO("./runs/train/drone_traffic_det/weights/best.pt")
# 执行模型验证
metrics = model.val(
data="./drone_traffic_dataset/traffic.yaml",
imgsz=640,
batch=24,
device=0,
verbose=True
)
# 输出航拍交通场景核心评估指标
print("===== 无人机航拍车辆检测模型评估指标 =====")
print(f"整体mAP@0.5:{metrics.box.map50:.4f}")
print(f"平均精确率(Precision):{metrics.box.p:.4f}")
print(f"平均召回率(Recall):{metrics.box.r:.4f}")
print(f"平均F1分数:{metrics.box.f1:.4f}")四、数据集使用策略 & 航拍交通场景深度思考
4.1 数据集划分方案
数据集总计8626张航拍图像,结合目标检测任务特性与样本分布,推荐行业通用划分比例:
- 训练集:70%(6038张),用于模型主体训练,覆盖绝大多数路况与车型;
- 验证集:15%(1294张),训练过程中监控精度、调优超参、防止过拟合;
- 测试集:15%(1294张),用于模型最终性能测评、业务仿真测试。
划分时保证车流密集、车辆稀疏、逆光、遮挡等场景均匀分布,避免场景集中导致模型泛化不足。
4.2 航拍车辆检测场景调优经验
- 小目标优化 :无人机俯视视角下车辆像素占比小,训练时开启
mosaic增强,推理阶段将置信度阈值下调至0.2~0.25,可大幅降低小车辆漏检率。 - 密集车流与遮挡处理 :街道车流密集、车辆互相遮挡是常态,建议将NMS的IOU阈值设置为0.4~0.45,减少检测框重叠与误过滤问题。
- 边缘部署适配:优先选用YOLOv8n、YOLOv8s等轻量化模型,8626张样本训练后的轻量模型推理速度快,可直接部署在无人机机载芯片、边缘计算网关,满足实时巡检需求。
- 光照干扰优化:户外航拍存在强光、阴影、逆光等问题,训练阶段开启HSV色彩增强,可提升模型在不同光照环境下的稳定性。
4.3 技术拓展方向
- 多任务融合 :在车辆检测基础上新增目标跟踪算法,实现车辆检测+轨迹跟踪,用于违章行为追溯、车流轨迹分析。
- 跨场景迁移学习:基于本数据集预训练模型,结合本地城市、园区、景区航拍数据做微调,快速适配个性化巡检场景。
- 数据联动应用:将检测结果与无人机GPS、定位数据结合,实现"车辆位置+地理坐标"联动,精准标记违停区域。
- 多模型对比实验:基于该标准数据集,对比YOLO、Faster R-CNN、RTMDet等算法在航拍场景下的性能差异,为算法选型提供依据。
五、总结
本套无人机航拍街道车辆目标检测数据集,依托8626张实景航拍图像、4类核心车型标注、标准化格式,精准解决空中视角交通检测的数据痛点。数据集场景丰富、样本体量充足,既支持模型从零训练,也适配现有算法微调与性能验证,覆盖学术研究、算法研发、工程落地、实训教学等多元场景。
配套完整的YOLOv8训练、推理、验证代码,深度结合无人机航拍、俯视小目标、密集车流等行业特性完成参数调优,形成数据-训练-推理-部署全链路解决方案。对于智慧交通、无人机安防、城市巡检领域的开发者与研究者而言,该数据集与实战代码能够显著降低项目研发门槛,加速航拍视觉技术在交通行业的落地应用。
附加标签:#YOLOv8实战 #无人机视觉开发 #交通AI算法 #航拍小目标检测 #CV工程实战 #车辆目标跟踪