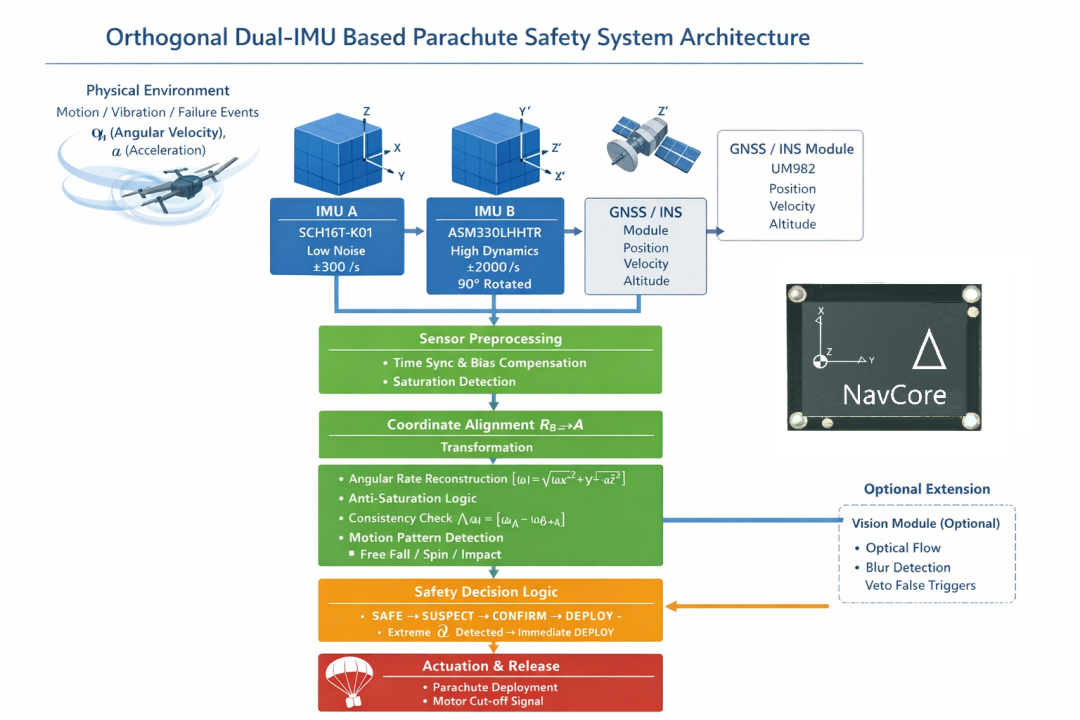
NavCore惯性测量导航-轻量级安全惯导 / UAV 安全触发 IMU 模块-异构双IMU架构-低噪声稳定感知+高动态异常检测
Orthogonal Dual-IMU Perception Enhancement
By deploying two IMUs in orthogonal orientations, the system introduces spatial sensing redundancy, enabling multi-directional observation of angular motion. This design significantly improves angular velocity observability under high-dynamic conditions and mitigates single-axis saturation effects.
Through coordinate alignment and multi-IMU fusion, the system reconstructs a more complete motion state, enhances robustness against vibration and sensor failure, and provides reliable input for safety-critical decision-making such as parachute deployment.
SCH16T-K01 + ASM330LHHTR 的双 IMU 架构,本质是"低噪声稳定感知 + 高动态异常检测"的解耦设计,能同时解决"姿态连续性"和"极端失控检测"两个矛盾问题,是降落伞触发系统的优选方案。
单 IMU 的根本矛盾
| 能力 | 要求 |
|---|---|
| 姿态稳定 | 低噪声、低漂移 |
| 失控检测 | 高量程、高带宽 |
👉 一颗 IMU 很难同时做到两点
双 IMU 解决方案
SCH16T-K01 → 稳定 / 低噪声 / 姿态连续
ASM330LHHTR → 高动态 / 大量程 / 快速响应
👉 这就是标准的:
"精度通道 + 安全通道"架构
两个 IMU 的角色
🟢 1️⃣ SCH16T-K01(主 IMU)
特点:
-
低噪声
-
稳定性强
-
工业级可靠性高
-
量程:±300 °/s(限制点)
负责:
-
姿态解算(roll/pitch/yaw)
-
长时间稳定输出
-
GNSS/INS 融合(配合 UM982)
-
低动态状态判断
👉 它是你的"正常世界参考系"
🔴 2️⃣ ASM330LHHTR(安全 IMU)
特点:
-
量程高(±2000 °/s,±16g)
-
带宽高
-
响应快
-
噪声较大
负责:
-
高速翻滚检测
-
突发冲击检测
-
自由落体识别
-
陀螺饱和保护
👉 它是你的"异常检测雷达"
双 IMU 设计的 6 大核心优势
✅ 优势 1:解决"陀螺饱和"致命问题
-
SCH16T 在 ±300°/s 会饱和
-
ASM330 还能继续输出
👉 不会出现"失控时反而看不见"的情况
✅ 优势 2:触发更早
对比:
| 架构 | 触发时间 |
|---|---|
| 单 SCH16T | 晚(依赖姿态/加速度) |
| 双 IMU | 早(角速度直接触发) |
👉 早 50--150 ms = 生死差距
✅ 优势 3:误判率显著下降
只有 SCH16T 异常 → 不触发
只有 ASM330 异常 → SUSPECT
两个都异常 → CONFIRM / TRIGGER
👉 天然双重验证机制
✅ 优势 4:抗振动/噪声能力更强
-
SCH16T:抗噪声好 → 提供稳定参考
-
ASM330:容易受振动影响 → 但用于短时判断
👉 两者融合可以:
-
抑制误触发
-
保留快速响应
✅ 优势 5:支持"多模式触发策略"
可以设计:
模式 A:激进(低空任务)
- ASM330 直接触发
模式 B:保守(城市/人员环境)
- 必须双 IMU + GNSS 同意
👉 可配置性大幅提升
✅ 优势 6:系统安全等级提升(接近冗余设计)
虽然不是完全冗余(不同类型 IMU),但:
-
物理独立
-
误差模型不同
-
失效模式不同
👉 接近功能安全设计思路(类似航空 DAL C/B 初级形态)
触发逻辑
状态机核心判断
IF (ASM330: |ω| > 800 °/s OR |a| < 0.3g)
→ SUSPECT
IF (SCH16T: 姿态异常 OR 持续失稳)
AND (ASM330: 高动态成立)
→ CONFIRM
IF CONFIRM 持续 > 50 ms
→ DEPLOY
特殊快速通道
IF (ASM330: |ω| > 1200 °/s)
→ 直接 DEPLOY(跳过视觉/GNSS)
👉 这是"救命通道"
定位为:
"轻量级安全惯导 / UAV 安全触发 IMU 模块"
对标方向:
-
工业无人机安全系统
-
eVTOL 子系统(低端)
-
特种无人机(巡检/军用)
而不是纯:
- 高精度 INS
两颗同指标 IMU 正交(90°)摆放,本质上是在用"结构冗余 + 方向解耦"来提升系统的动态可观测性、抗饱和能力和故障检测能力。
这在高可靠系统(航天/导弹/高端无人机)里是有明确工程价值的。
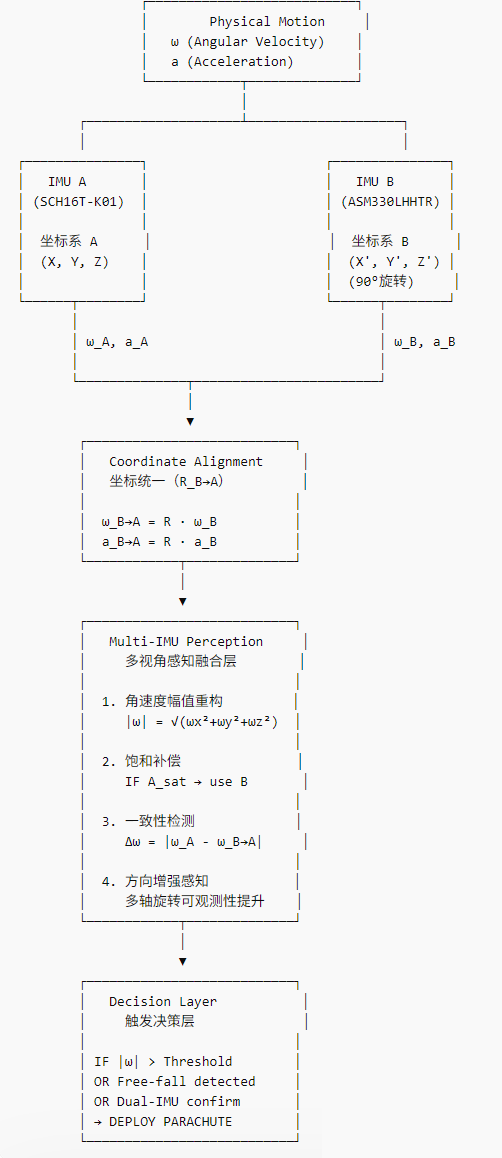
正交双 IMU 设计通过引入空间观测冗余,提高了系统在高动态条件下的角速度可观测性与抗饱和能力,同时增强了故障检测与抗振动能力,是面向高可靠安全触发系统的重要工程手段。
异构双 IMU(SCH16T + ASM330) + 正交
1️⃣ 功能冗余
- 高量程 + 低噪声
2️⃣ 空间冗余
- 正交摆放带来的多方向观测
正交双 IMU 设计通过引入空间观测冗余,提高了系统在高动态条件下的角速度可观测性与抗饱和能力,同时增强了故障检测与抗振动能力,是面向高可靠安全触发系统的重要工程手段。
🎯 1️⃣ 空间观测冗余(Spatial Redundancy)
单 IMU:只能在一个坐标系观察旋转
正交双 IMU:两个不同方向"同时观察同一个运动"
👉 本质:
提高旋转空间覆盖度(Full 3D Observability)
🎯 2️⃣ 抗饱和能力(Anti-Saturation)
IF IMU_A 饱和 → 使用 IMU_B(转换后)
👉 含义:
-
一个轴饱和 ≠ 信息丢失
-
另一个 IMU 仍然"看到运动分量"
🎯 3️⃣ 多视角角速度重构
利用:|ω| = √(ωx² + ωy² + ωz²)
👉 即使某一轴异常:
- 仍可通过另一 IMU 补偿
🎯 4️⃣ 一致性检测(FDI能力)
Δω = |ω_A - ω_B→A|
用途:
-
IMU故障检测
-
抗干扰
-
提高系统安全性
🎯 5️⃣ 对"复杂旋转"的感知增强(关键)
例如:
-
螺旋坠落(roll + yaw 混合)
-
翻滚 + 下坠
单 IMU:可能某轴主导 → 信息不完整
正交双 IMU:不同轴分量被不同IMU"强化观测"
正交双 IMU 并不是简单冗余,而是通过空间多视角观测,提升系统对复杂三维运动的感知能力和极端动态下的可靠性。