本期接着深入编写项目代码
相关代码上传至gitee:喜欢可以点个赞谢谢
目录
EventLoop模块
Eventfd机制
eventfd是本项目中的一种事件通知机制,用于创建一个描述符用于实现事件通知
eventfd本质在内核里边管理的就是一个计数器,创建eventfd就会在内核中创建一个计数器(结构) ,每当向eventfd中写入一个数值--用于表示事件通知次数,可以使用read进行数据的读取,读取到的数据就是通知的次数
假设每次给eventfd中写入一个1,就表示通知了一次,连续写了三次之后,再去read读取出来的数字就是3,读取之后计数清0。
表达式
cpp
//主函数
#include <sys/eventfd.h>
int eventfd(unsigned int initval, int flags);
// 这并非标准C++类型,而是在 <sys/eventfd.h> 中定义的 typedef
typedef uint64_t eventfd_t;
// 封装的读取函数,等价于 read(fd, value, sizeof(uint64_t))
int eventfd_read(int fd, eventfd_t *value);
// 封装的写入函数,等价于 write(fd, value, sizeof(uint64_t))
int eventfd_write(int fd, eventfd_t value);参数 (Parameters)
eventfd() 函数接受两个参数:
-
unsigned int initval:这是计数器的初始值。它决定了新创建的eventfd对象的"起始状态"。例如,如果你想在创建时就触发一个事件,可以将其设置为1;如果想等待事件发生,则设为0。 -
int flags:这是行为控制标志,通过按位或(|)组合使用。-
EFD_CLOEXEC:为新的文件描述符设置 close-on-exec 标志。这是一个非常好的实践,可以防止文件描述符意外泄漏到通过exec()系列函数启动的子进程中。 -
EFD_NONBLOCK:为文件描述符设置非阻塞模式。这使得后续的read在计数器为0时不会阻塞等待,而是立即返回-1并设置errno为EAGAIN,这在事件循环中至关重要。 -
EFD_SEMAPHORE:为read操作提供信号量语义。-
未设置此标志 (默认):
read将返回计数器的当前值 ,并将其重置为0。这就像一个事件计数器,一次读取耗尽所有事件。 -
设置此标志 :
read将返回值1,并将计数器减1。这就像一个经典的信号量,允许多个线程安全地消耗同一个"资源"。
-
-
返回值 (Return Value)
-
成功时 (
>= 0) :返回一个非负整数 ,即文件描述符(file descriptor) 。你可以像操作普通文件一样,将这个描述符用于read、write、poll、select、epoll或close等系统调用。 -
失败时 (
-1) :返回 -1 ,并设置全局变量errno来指示具体的错误原因。常见的错误码包括:-
EINVAL:传入的flags参数无效(例如,使用了不被支持的标志组合)。 -
EMFILE:当前进程已达到其可打开的文件描述符数量上限。 -
ENFILE:系统全局的文件描述符数量已达上限。 -
ENODEV:系统内存不足,无法创建新对象
-
示例代码:
cpp
#include <iostream>
#include <thread>
#include <cstring>
#include <sys/eventfd.h>
#include <unistd.h>
void consumer(int efd)
{
std::cout << "[消费者] 等待事件..." << std::endl;
uint64_t value = 0;
// read 默认阻塞,直到 eventfd 计数器非零
ssize_t n = read(efd, &value, sizeof(value));
if (n == sizeof(value))
{
std::cout << "[消费者] 收到事件!计数器值 = " << value << std::endl;
// 此时 eventfd 的计数器已被内核重置为 0(默认非 EFD_SEMAPHORE 模式)
}
else
{
std::cerr << "[消费者] 读取出错" << std::endl;
}
}
void producer(int efd)
{
std::cout << "[生产者] 工作开始..." << std::endl;
std::this_thread::sleep_for(std::chrono::seconds(2)); // 模拟耗时操作
uint64_t value = 1; // 写入任意非零值即可触发事件
std::cout << "[生产者] 工作完成,触发事件..." << std::endl;
ssize_t n = write(efd, &value, sizeof(value));
if (n == sizeof(value))
{
std::cout << "[生产者] 事件已发送" << std::endl;
}
else
{
std::cerr << "[生产者] 发送失败" << std::endl;
}
}
int main()
{
// 创建一个初始值为 0 的 eventfd 对象
int efd = eventfd(0, 0);
if (efd == -1)
{
std::cerr << "创建 eventfd 失败: " << strerror(errno) << std::endl;
return 1;
}
std::cout << "eventfd 文件描述符: " << efd << std::endl;
// 启动消费者(等待事件)和生产者(触发事件)
std::thread t1(consumer, efd);
std::thread t2(producer, efd);
t1.join();
t2.join();
close(efd);
return 0;
}结果为:

设计思路
作用 :进行事件监控,以及事件处理的模块
关键点:这个模块与线程是一一对应关联的。
监控了一个连接,而这个连接一旦就绪,就要进行事件处理。
但是如果这个描述符,在多个线程中都触发了事件,进行处理,就会存在线程安全问题。
因此我们需要将一个连接的事件监控,以及连接事件处理,以及其他操作都放在同一个线程中进行。
如何保证一个连接的所有操作都在eventloop对应的线程中?
解决方案 :给eventloop模块中,添加一个任务队列,
对连接的所有操作,都进行一次封装,将对接的操作并不直接执行,而是当作任务添加到任务队列中。
eventloop处理流程 :
-
在线程中对描述符进行事件监控
-
有描述符就绪则对描述符进行事件处理(如何保证处理回调函数中的操作都在线程中)
-
所有的就绪事件处理完了,这时候再去将任务队列中的所有任务一一执行
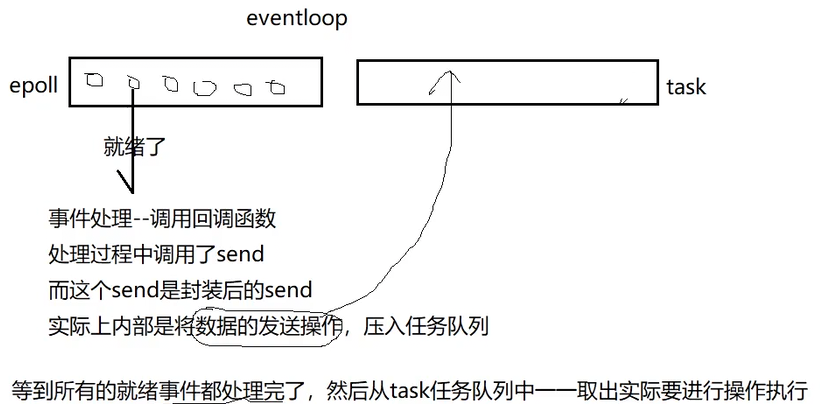
这样就保证了链接的所有操作全在单一线程内部进行
模块设计:
- 事件监控
使用Poller模块
有事件就绪则进行事件处理
- 执行任务队列中的任务
一个线程安全的任务队列
注意点 :
因为有可能因为等待描述符IO事件就绪,导致执行流流程阻塞,这时候任务队列中的任务将得不到执行 。因此需要有一个事件通知的东西,能够唤醒事件监控的阻塞
源码
EventLoop.hpp
cpp
#pragma once
#include"Poller.hpp"
#include<sys/eventfd.h>
#include <atomic>
#include <mutex>
#include<memory>
#include <thread>
namespace ImMuduo
{
class EventLoop
{
using Functor = std::function<void()>;
public:
EventLoop();
~EventLoop();
//判断当前执行的任务是否属于当前线程,如果不属于,就将任务添加到任务队列中;否则直接执行任务
void RunInLoop(const Functor& task);
//执行任务队列中的任务
void QueueLoop(const Functor& task);
//判断当前线程是否是事件循环线程
bool IsInLoop();
//添加或者修改事件循环线程的事件监控
void UpdateEvent(Channel* channel);
//删除事件循环线程的事件监控
void RemoveEvent(Channel* channel);
//执行所有任务
void RunAllTasks();
//启动事件循环线程:事件监控------等待执行------执行任务
void Start();
//停止事件循环线程
void Stop();
private:
static int CreateEventfd();
void ReadEventfd();
void WeakUpEventfd();
private:
int eventfd_;//eventfd唤醒的IO事件监控可能的阻塞
std::unique_ptr<Channel> eventfdChannel_;//eventfd的事件监控
Poller poller_;//所有描述符的事件监控
std::vector<Functor> tasks_;//任务队列
std::mutex mutex_;//互斥锁,保护任务队列
std::atomic<bool> running_;//事件循环运行标志
std::thread::id threadId_;//线程ID
};
}EventLoop.cpp
cpp
#include "EventLoop.hpp"
#include "Log.hpp"
#include <unistd.h>
#include <cstring>
namespace ImMuduo
{
int EventLoop::CreateEventfd()
{
int fd = ::eventfd(0, EFD_NONBLOCK | EFD_CLOEXEC);
if (fd < 0)
{
ERROR("Failed to create eventfd: %s", strerror(errno));
std::abort();
}
return fd;
}
void EventLoop::ReadEventfd()
{
uint64_t val = 0;
ssize_t n = ::read(eventfd_, &val, sizeof(val));
if (n < 0)
{
if (errno != EAGAIN)
{
ERROR("ReadEventfd failed: %s", strerror(errno));
}
}
else if (n != sizeof(val))
{
WARN("ReadEventfd read %zd bytes, expected %zu", n, sizeof(val));
}
}
void EventLoop::WeakUpEventfd()
{
uint64_t val = 1;
ssize_t n = ::write(eventfd_, &val, sizeof(val));
if (n != sizeof(val))
{
ERROR("WeakUpEventfd write failed: %s", strerror(errno));
}
}
EventLoop::EventLoop()
:eventfd_(CreateEventfd()),
eventfdChannel_(std::make_unique<Channel>(eventfd_, &poller_)),
running_(false),
threadId_(std::this_thread::get_id())
{
eventfdChannel_->SetReadCallback(
[this]() { ReadEventfd(); });
eventfdChannel_->EnableRead();
}
EventLoop::~EventLoop()
{
if (running_)
{
Stop();
}
::close(eventfd_);
}
void EventLoop::RunAllTasks()
{
std::vector<Functor> tasks;
{
std::lock_guard<std::mutex> lock(mutex_);
tasks_.swap(tasks);
}
for (auto &task : tasks)
{
task();
}
}
void EventLoop::Start()
{
running_ = true;
while (running_)
{
std::vector<Channel*> channels;
poller_.Poll(channels);
for (auto &channel : channels)
{
channel->HandleEvent();
}
RunAllTasks();
}
}
void EventLoop::Stop()
{
running_ = false;
WeakUpEventfd();
}
bool EventLoop::IsInLoop()
{
return std::this_thread::get_id() == threadId_;
}
void EventLoop::RunInLoop(const Functor& task)
{
if (IsInLoop())
{
task();
}
else
{
QueueLoop(task);
}
}
void EventLoop::QueueLoop(const Functor& task)
{
{
std::lock_guard<std::mutex> lock(mutex_);
tasks_.push_back(task);
}
//唤醒有可能因为没有事件就绪,而导致的epoll阻塞;
//其实就是给eventfd写入一个数据,eventfd就会触发可读事件
WeakUpEventfd();
}
void EventLoop::UpdateEvent(Channel* channel)
{
poller_.UpdateChannel(channel);
}
void EventLoop::RemoveEvent(Channel* channel)
{
poller_.RemoveChannel(channel);
}
}TimeWheel时间轮模块整合
设计思想
timerfd:实现内核每隔一段时间,给进程一次超时事件(timerfd可读)
timerwheel:实现每次执行Runtimetask,都可以执行一波到期的定时任务
要实现一个完整的秒级定时器,就需要将这两个功能整合到一起。其中timerfd设置为每秒钟触发一次定时事件,当事件被触发,则运行一次timerwheel的runtimeTask,执行一下所有的过期定时任务
timerfd事件可以由EventLoop触发。
源码
timewheel.hpp
cpp
#pragma once
#include "EventLoop.hpp"
#include <memory>
#include <cstdint>
#include <vector>
#include <functional>
#include <unordered_map>
namespace ImMuduo
{
using Task=std::function<void()>;
using Release=std::function<void()>;
class TimeTask
{
public:
TimeTask(uint64_t id,uint32_t timeout,const Task& task);
~TimeTask();
//设置定时器任务对象被销毁时需要执行的任务
void SetRelease(const Release& release);
//获取定时器任务对象超时时间
uint32_t GetTimeout()const;
//获取定时器任务对象ID
uint64_t GetId()const;
private:
uint64_t id_; //定时器任务对象ID
uint32_t timeout_; //定时器任务超时时间
Task task_; //定时器需要执行的任务
Release release_; //定时器任务对象被销毁时需要执行的任务
};
class TimeWheel
{
using SharedTask=std::shared_ptr<TimeTask>;
using WeakTask=std::weak_ptr<TimeTask>;
void RemoveTimer(uint64_t id);
static int CreateTimerfd();
void ReadTimerfd();
void OnTime();
public:
explicit TimeWheel(EventLoop* eventLoop);
//添加定时器任务对象到时间轮中
void TimerAdd(uint64_t id,uint32_t timeout,const Task& task);
//刷新定时任务
void TimerRefresh(uint64_t id);
//取消定时任务
void TimerCancel(uint64_t id);
//执行定时任务
void TimerRunTask();
~TimeWheel()=default;
private:
//添加定时器任务对象到时间轮中
void TimerAddInLoop(uint64_t id,uint32_t timeout,const Task& task);
//刷新定时任务
void TimerRefreshInLoop(uint64_t id);
//取消定时任务
void TimerCancelInLoop(uint64_t id);
private:
int ticks_; //当前秒针,走到哪里执行哪里任务
int capacity_; //最大延迟时间
std::vector<std::vector<SharedTask>>wheel_; //时间轮,包含多个槽,每个槽中包含多个定时器任务对象
std::unordered_map<uint64_t,WeakTask> taskMap_; //定时器任务对象ID与定时器任务对象的映射关系
int timerfd_; //定时器文件描述符------可读事件回调
EventLoop* eventLoop_; //事件循环指针
std::unique_ptr<Channel> timerChannel_; //定时器通道指针,用于注册定时器事件到epoll
};
}timewheel.cpp
cpp
#include "timewheel.hpp"
#include "Log.hpp"
#include <sys/timerfd.h>
#include <cstring>
#include <unistd.h>
#include <algorithm>
namespace ImMuduo
{
int TimeWheel::CreateTimerfd()
{
int fd = ::timerfd_create(CLOCK_MONOTONIC, TFD_NONBLOCK | TFD_CLOEXEC);
if (fd < 0)
{
ERROR("Failed to create timerfd: %s", strerror(errno));
std::abort();
}
return fd;
}
TimeTask::TimeTask(uint64_t id,uint32_t timeout,const Task& task)
:id_(id),timeout_(timeout),task_(task),release_()
{}
TimeTask::~TimeTask()
{
task_();
release_();
}
void TimeTask::SetRelease(const Release& release)
{
release_=release;
}
uint32_t TimeTask::GetTimeout()const
{
return timeout_;
}
uint64_t TimeTask::GetId()const
{
return id_;
}
TimeWheel::TimeWheel(EventLoop* eventLoop)
:ticks_(0), capacity_(60), wheel_(capacity_),
timerfd_(CreateTimerfd()), eventLoop_(eventLoop),
timerChannel_(std::make_unique<Channel>(timerfd_, nullptr))
{
timerChannel_->SetReadCallback([this]() { OnTime(); });
timerChannel_->EnableRead();//启动可读事件回调
}
void TimeWheel::ReadTimerfd()
{
uint64_t val;
ssize_t n = ::read(timerfd_, &val, sizeof(val));
if (n < 0)
{
if (errno != EAGAIN)
{
ERROR("ReadTimerfd failed: %s", strerror(errno));
}
}
else if (n != sizeof(val))
{
WARN("ReadTimerfd read %zd bytes, expected %zu", n, sizeof(val));
}
}
void TimeWheel::OnTime()
{
ReadTimerfd();
TimerRunTask();
}
void TimeWheel::RemoveTimer(uint64_t id)
{
if(taskMap_.find(id)!=taskMap_.end())
{
taskMap_.erase(id);
}
}
//定时任务考虑到对连接的问题,需要考虑线程安全问题
//定时器中有个_timers成员,定时器信息的操作有可能在多线程中进行,因此需要考虑线程安全问题
//如果不想加锁,那就把对定期的所有操作,都放到一个线程中进行
void TimeWheel::TimerAdd(uint64_t id,uint32_t timeout,const Task& task)
{
eventLoop_->RunInLoop([this,id,timeout,task](){
TimerAddInLoop(id,timeout,task);
});
}
void TimeWheel::TimerAddInLoop(uint64_t id,uint32_t timeout,const Task& task)
{
SharedTask taskPtr=std::make_shared<TimeTask>(id,timeout,task);
//bind写法
// taskPtr->SetRelease(std::bind(&TimeWheel::RemoveTimer,this,id));
//推荐lambda表达式
taskPtr->SetRelease([this,id](){
this->RemoveTimer(id);
});
taskMap_[id]=WeakTask(taskPtr);
int pos=(ticks_+timeout)%capacity_;
wheel_[pos].push_back(taskPtr);
}
void TimeWheel::TimerRefresh(uint64_t id)
{
eventLoop_->RunInLoop([this,id](){
TimerRefreshInLoop(id);
});
}
void TimeWheel::TimerRefreshInLoop(uint64_t id)
{
auto it=taskMap_.find(id);
//通过定时器的weak_ptr获取shared_ptr的定时器任务对象
if(it==taskMap_.end())
{
return ;//没找到刷新任务,无法刷新,无法延迟
}
SharedTask taskPtr=it->second.lock();//获取对应的shared_ptr的定时器任务对象
if(!taskPtr)
{
return ;//weak_ptr已经失效,无法刷新
}
int dlay=taskPtr->GetTimeout();
int pos=(ticks_+dlay)%capacity_;
wheel_[pos].push_back(taskPtr);
}
void TimeWheel::TimerCancel(uint64_t id)
{
eventLoop_->RunInLoop([this, id]() {
TimerCancelInLoop(id);
});
}
void TimeWheel::TimerCancelInLoop(uint64_t id)
{
auto it = taskMap_.find(id);
if (it == taskMap_.end()) return;
SharedTask taskPtr = it->second.lock();
if (taskPtr)
{
TimeTask* raw = taskPtr.get();
for (auto &bucket : wheel_)
{
auto bucketIt = std::find_if(bucket.begin(), bucket.end(),
[raw](const SharedTask& p) { return p.get() == raw; });
if (bucketIt != bucket.end())
{
bucket.erase(bucketIt);
break;
}
}
}
taskMap_.erase(id);
}
void TimeWheel::TimerRunTask()
{
ticks_=(ticks_+1)%capacity_;
wheel_[ticks_].clear();//走到哪里释放哪里的任务对象
}
}EventLoop模块与TimeWheel模块联调整合
EventLoop.hpp
cpp
#pragma once
#include"Poller.hpp"
#include"Poller.hpp"
#include"timewheel.hpp"
#include<sys/eventfd.h>
#include <atomic>
#include <mutex>
#include<memory>
#include <thread>
namespace ImMuduo
{
class EventLoop
{
using Functor = std::function<void()>;
public:
EventLoop();
~EventLoop();
//判断当前执行的任务是否属于当前线程,如果不属于,就将任务添加到任务队列中;否则直接执行任务
void RunInLoop(const Functor& task);
//执行任务队列中的任务
void QueueLoop(const Functor& task);
//判断当前线程是否是事件循环线程
bool IsInLoop();
//添加或者修改事件循环线程的事件监控
void UpdateEvent(Channel* channel);
//删除事件循环线程的事件监控
void RemoveEvent(Channel* channel);
//执行所有任务
void RunAllTasks();
//启动事件循环线程:事件监控------等待执行------执行任务
void Start();
//停止事件循环线程
void Stop();
//添加定时任务
void TimerAdd(uint64_t id,uint32_t timeout,const Task& task);
//刷新定时任务
void TimerRefresh(uint64_t id);
//取消定时任务
void TimerCancel(uint64_t id);
//执行定时任务
void TimerRun();
//判断定时任务是否存在
bool TimerExist(uint64_t id);
private:
static int CreateEventfd();
void ReadEventfd();
void WeakUpEventfd();
private:
int eventfd_;//eventfd唤醒的IO事件监控可能的阻塞
std::unique_ptr<Channel> eventfdChannel_;//eventfd的事件监控
Poller poller_;//所有描述符的事件监控
std::vector<Functor> tasks_;//任务队列
std::mutex mutex_;//互斥锁,保护任务队列
std::atomic<bool> running_;//事件循环运行标志
std::thread::id threadId_;//线程ID
TimeWheel timeWheel_;//定时器
};
}EventLoop.cpp
cpp
#include "EventLoop.hpp"
#include "Log.hpp"
#include <unistd.h>
#include <cstring>
namespace ImMuduo
{
EventLoop::EventLoop()
:eventfd_(CreateEventfd()),
eventfdChannel_(std::make_unique<Channel>(eventfd_, &poller_)),
running_(false),
threadId_(std::this_thread::get_id()),timeWheel_(this)
{
eventfdChannel_->SetReadCallback(
[this]() { ReadEventfd(); });
eventfdChannel_->EnableRead();
}
EventLoop::~EventLoop()
{
if (running_)
{
Stop();
}
::close(eventfd_);
}
int EventLoop::CreateEventfd()
{
int fd = ::eventfd(0, EFD_NONBLOCK | EFD_CLOEXEC);
if (fd < 0)
{
ERROR("Failed to create eventfd: %s", strerror(errno));
std::abort();
}
return fd;
}
void EventLoop::ReadEventfd()
{
uint64_t val = 0;
ssize_t n = ::read(eventfd_, &val, sizeof(val));
if (n < 0)
{
if (errno != EAGAIN)
{
ERROR("ReadEventfd failed: %s", strerror(errno));
}
}
else if (n != sizeof(val))
{
WARN("ReadEventfd read %zd bytes, expected %zu", n, sizeof(val));
}
}
void EventLoop::WeakUpEventfd()
{
uint64_t val = 1;
ssize_t n = ::write(eventfd_, &val, sizeof(val));
if (n != sizeof(val))
{
ERROR("WeakUpEventfd write failed: %s", strerror(errno));
}
}
void EventLoop::RunAllTasks()
{
std::vector<Functor> tasks;
{
std::lock_guard<std::mutex> lock(mutex_);
tasks_.swap(tasks);
}
for (auto &task : tasks)
{
task();
}
}
void EventLoop::Start()
{
running_ = true;
while (running_)
{
std::vector<Channel*> channels;
poller_.Poll(channels);
for (auto &channel : channels)
{
channel->HandleEvent();
}
RunAllTasks();
}
}
void EventLoop::Stop()
{
running_ = false;
WeakUpEventfd();
}
bool EventLoop::IsInLoop()
{
return std::this_thread::get_id() == threadId_;
}
void EventLoop::RunInLoop(const Functor& task)
{
if (IsInLoop())
{
task();
}
else
{
QueueLoop(task);
}
}
void EventLoop::QueueLoop(const Functor& task)
{
{
std::lock_guard<std::mutex> lock(mutex_);
tasks_.push_back(task);
}
//唤醒有可能因为没有事件就绪,而导致的epoll阻塞;
//其实就是给eventfd写入一个数据,eventfd就会触发可读事件
WeakUpEventfd();
}
void EventLoop::UpdateEvent(Channel* channel)
{
poller_.UpdateChannel(channel);
}
void EventLoop::RemoveEvent(Channel* channel)
{
poller_.RemoveChannel(channel);
}
void EventLoop::TimerAdd(uint64_t id, uint32_t timeout, const Task& task)
{
timeWheel_.TimerAdd(id, timeout, task);
}
void EventLoop::TimerRefresh(uint64_t id)
{
timeWheel_.TimerRefresh(id);
}
void EventLoop::TimerCancel(uint64_t id)
{
timeWheel_.TimerCancel(id);
}
void EventLoop::TimerRun()
{
timeWheel_.TimerRunTask();
}
bool EventLoop::TimerExist(uint64_t id)
{
return timeWheel_.TimerExist(id);
}
}本期内容到这里就结束了,喜欢请点个赞谢谢
封面图自取:
