准备
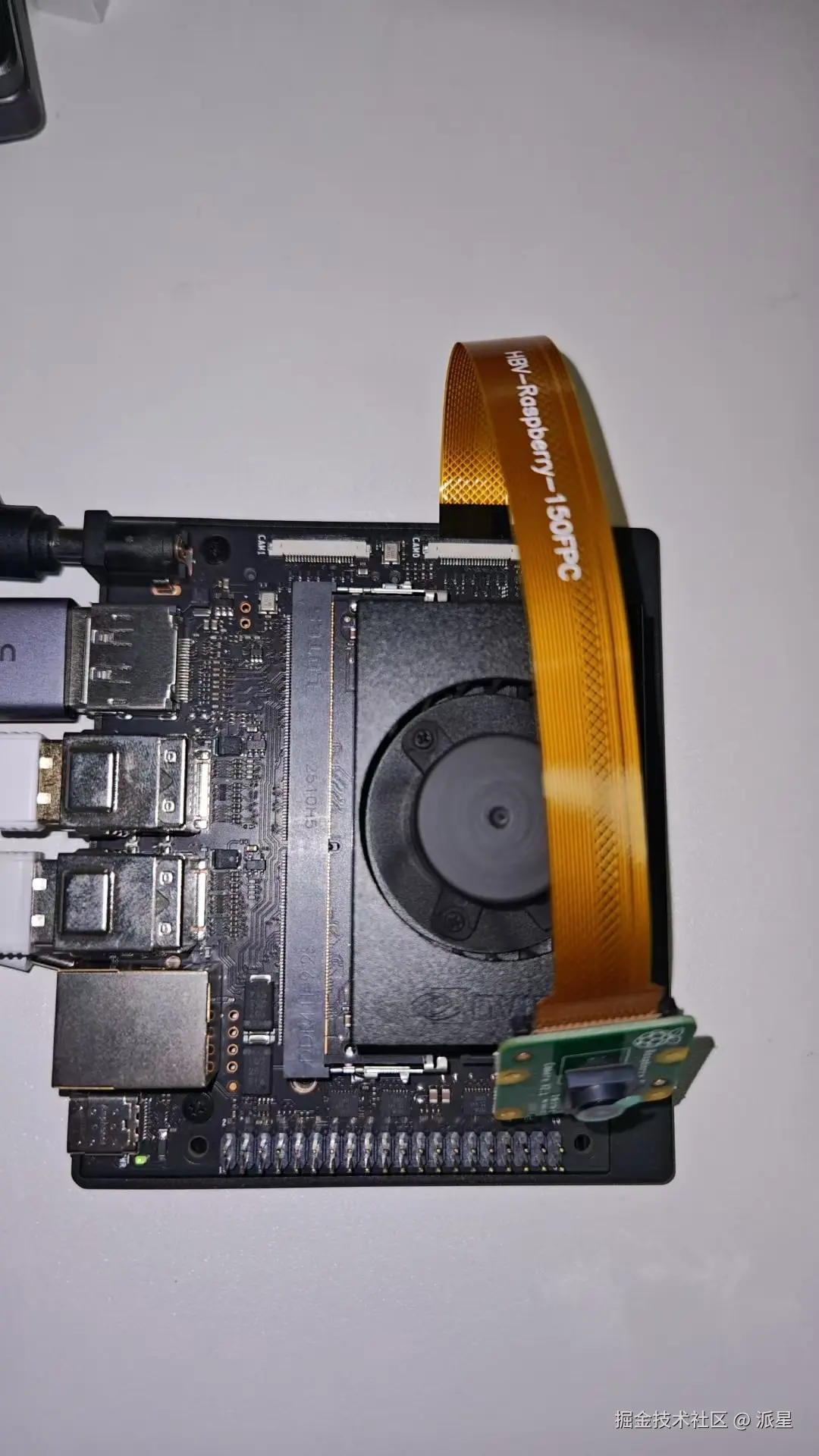
- NVIDIA Jetson Orin Nano 开发板
- Raspberry Camera V2 普通版
调通摄像头
插线
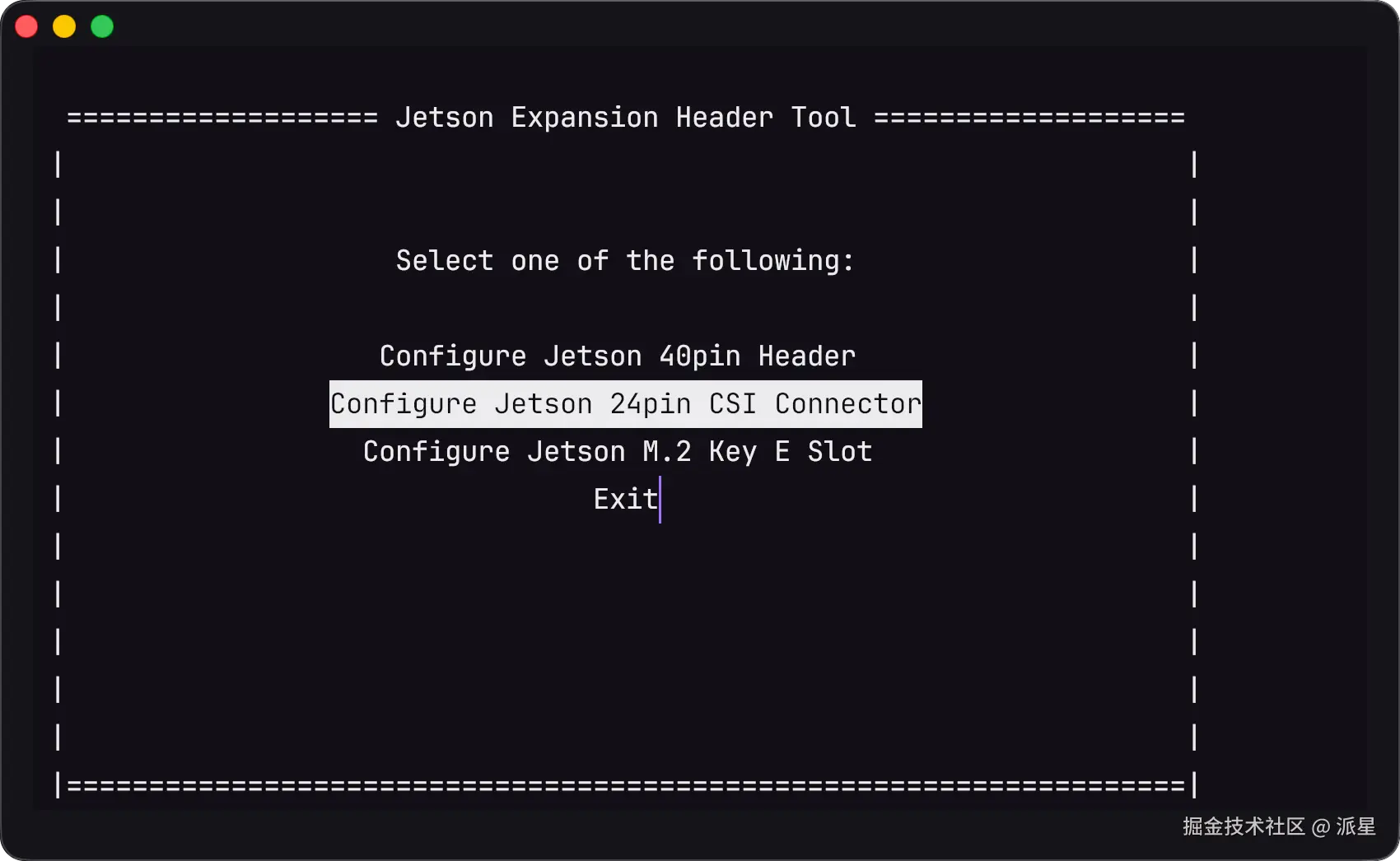
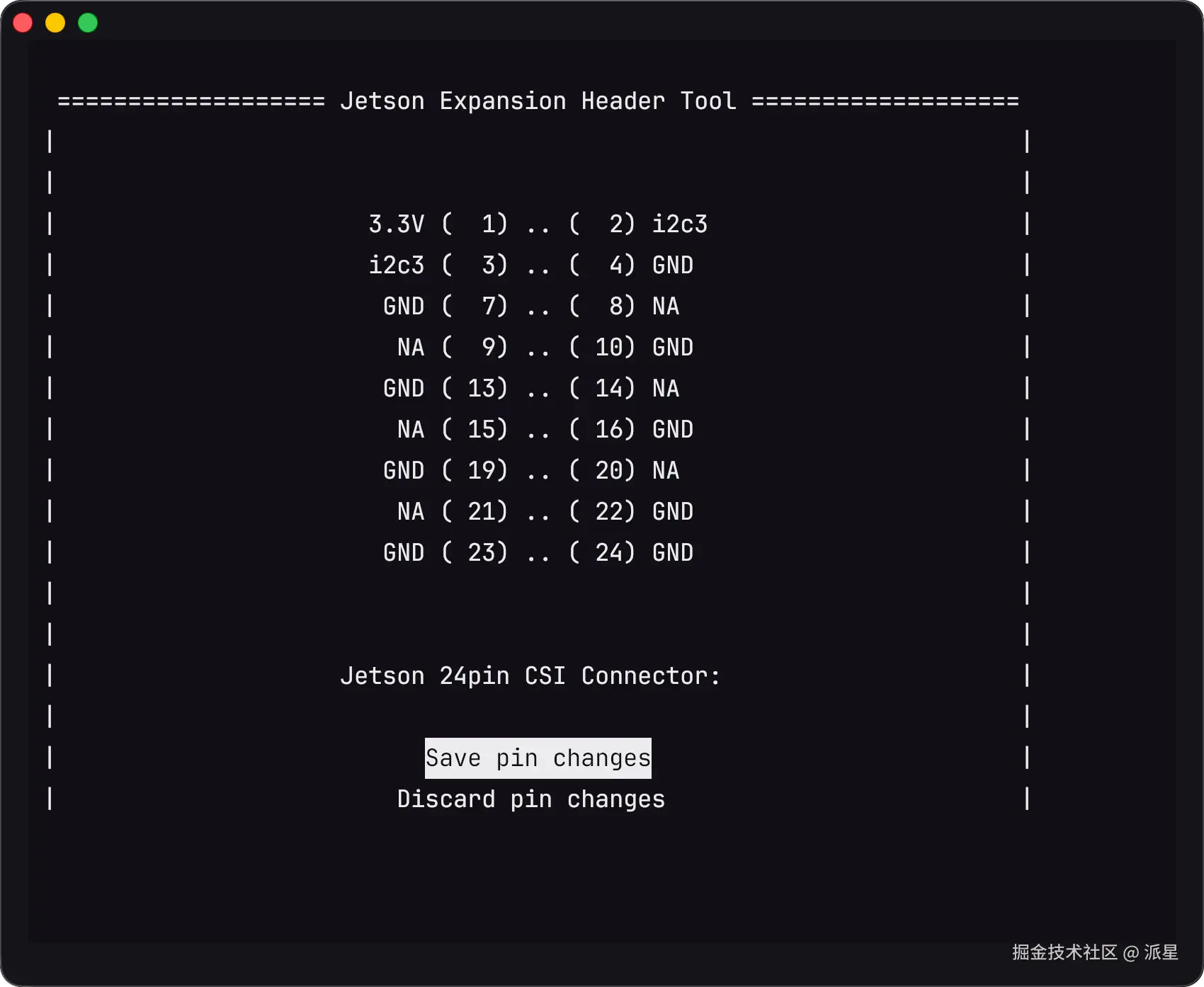
配置引脚工作模式
bash
cd /opt/nvidia/jetson-io
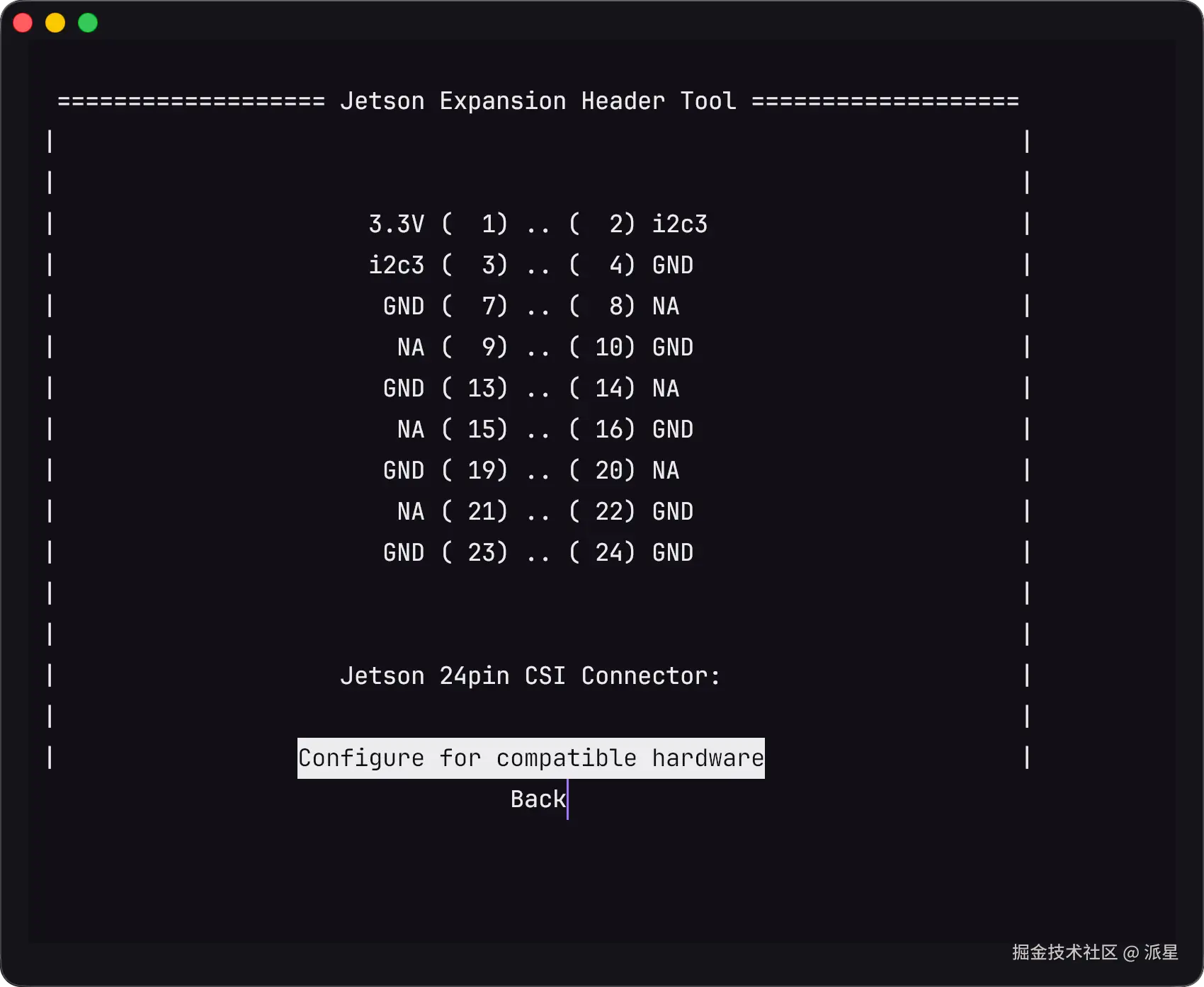
sudo python jetson-io.py进入设置页面后,参考下面的选项,回车即可
我这里是单个摄像头,选择IMX219-A
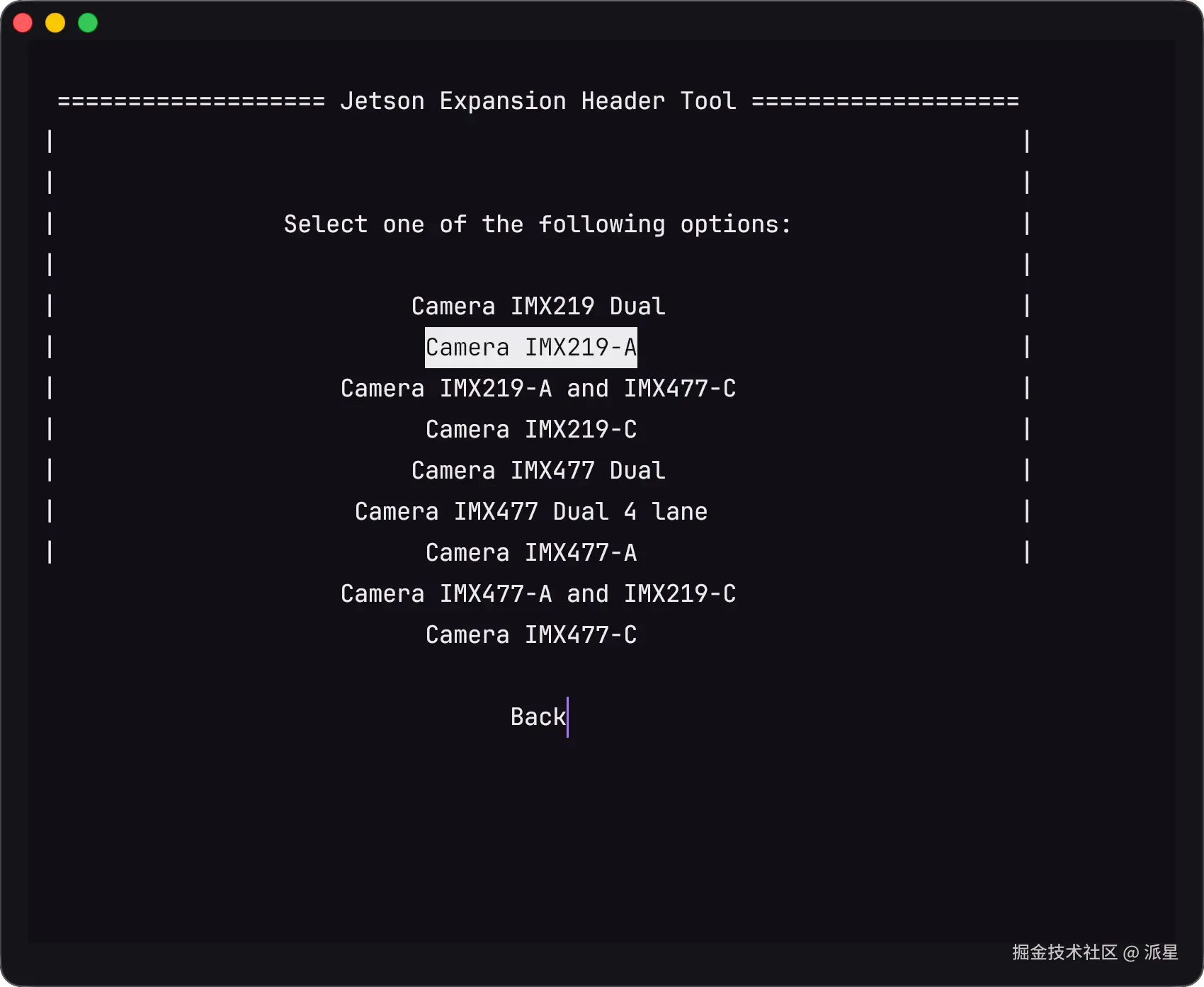
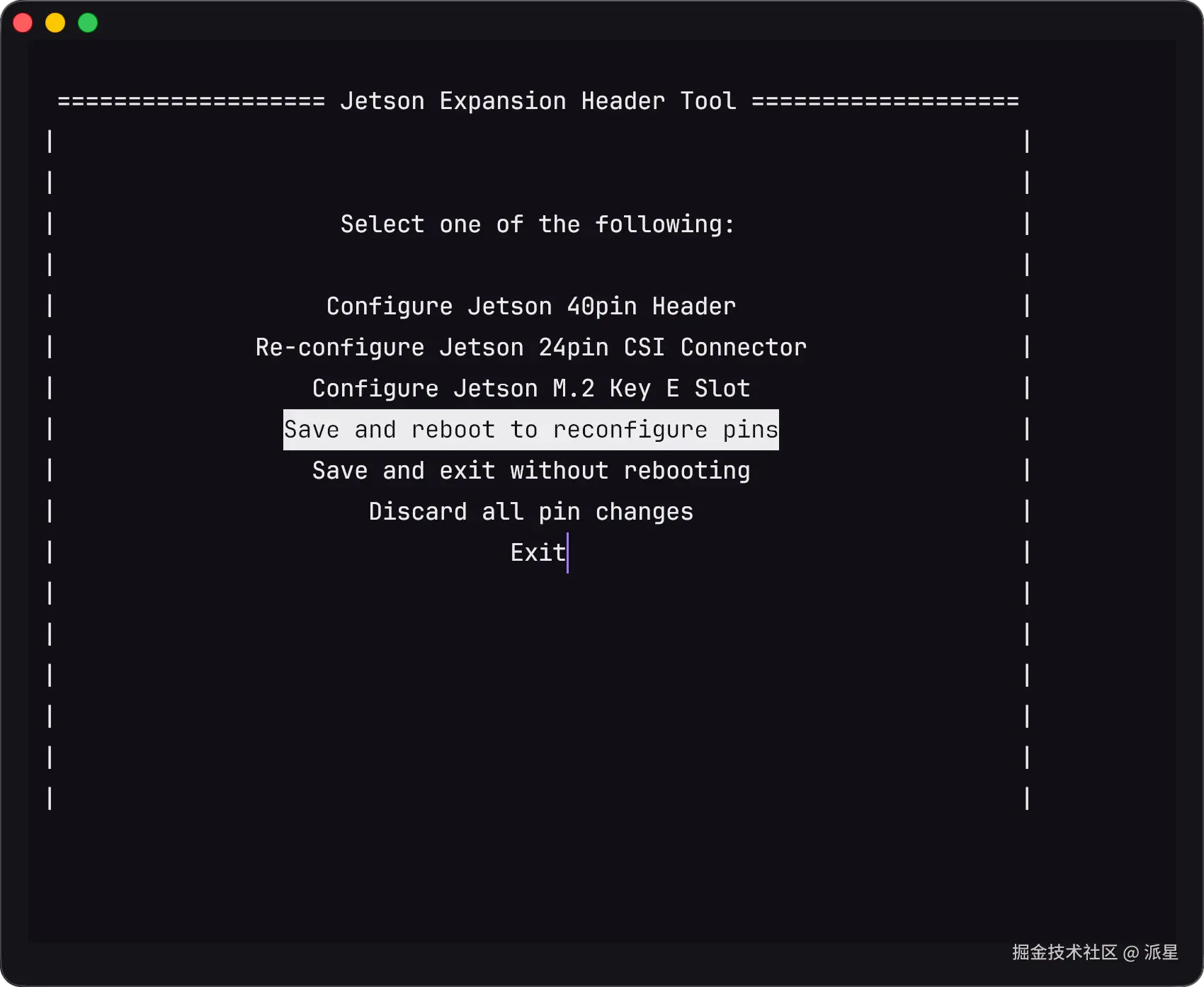
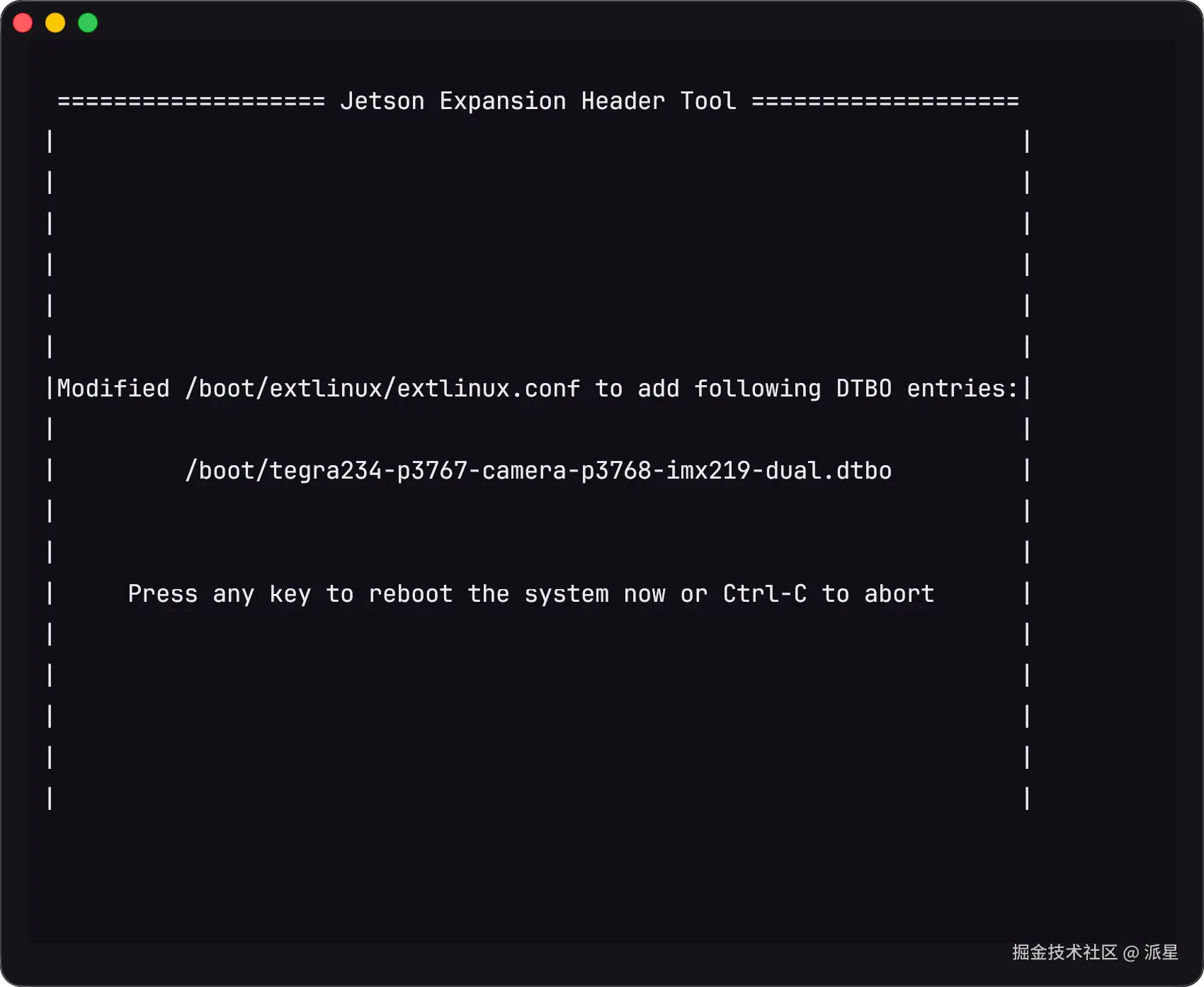
之后设备会自动重启
查看是否有摄像头设备:
bash
ls /dev/video*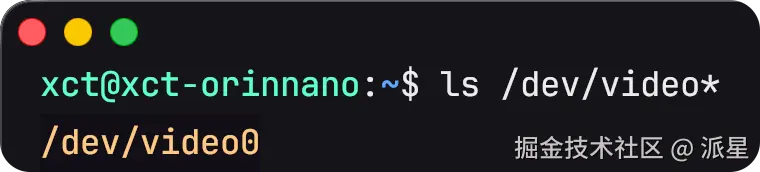
可以看到有设备
执行CSI测试代码
进入github.com/JetsonHacks...,克隆该仓库,之后运行simple_camera.py
bash
git clone https://github.com/JetsonHacksNano/CSI-Camera.git
cd CSI-Camera
# simple_camera.py通过 OpenCV 读取摄像头画面,并将画面帧显示在屏幕窗口中
python simple_camera.py # 注意这条命令要在开发板的桌面上运行。不要ssh远程连接运行之后会看到视频窗口,说明摄像头连接成功,并且画面可成功传输。
OpenCV + GStreamer 推流
注意: 这里使用全局的python环境。想启用Gstreamer推流,就不要用pip安装opencv,而是用apt安装opencv(若已用pip
目标:
- CSI 摄像头可采集
- OpenCV 可通过 GStreamer 读帧
- OpenCV + GStreamer 推出 H264 UDP 流
- 项目后端
serve_api.sh正常提供实时画面与推理接口
全程只讲一种方案:CSI(nvarguscamerasrc)。
1. 环境安装(全局 Python,不用 .venv)
bash
sudo apt update
sudo apt install -y \
python3 python3-pip python3-dev \
python3-opencv python3-numpy \
gstreamer1.0-tools \
gstreamer1.0-plugins-base \
gstreamer1.0-plugins-good \
gstreamer1.0-plugins-bad \
gstreamer1.0-libav \
gstreamer1.0-alsa \
gstreamer1.0-glJetson 上补装/修复 CSI 相关组件:
bash
sudo apt install --reinstall -y nvidia-l4t-gstreamer
sudo systemctl restart nvargus-daemon如果之前装过 pip 版 OpenCV,建议先清掉,避免覆盖系统 OpenCV:
bash
python3 -m pip uninstall -y opencv-python opencv-contrib-python opencv-python-headless2. 先验证 CSI 与 GStreamer(不经过 OpenCV)
检查 Argus 服务与插件:
bash
sudo systemctl status nvargus-daemon --no-pager
gst-inspect-1.0 nvarguscamerasrc跑一条最小采集链路(稳定输出即成功):
bash
gst-launch-1.0 -e nvarguscamerasrc sensor-id=0 ! \
"video/x-raw(memory:NVMM),width=1280,height=720,framerate=30/1" ! \
queue ! nvvidconv ! queue ! fakesink3. 验证 OpenCV 是否可用 GStreamer
bash
python3 - <<'PY'
import cv2
print("OpenCV:", cv2.__version__)
print("GStreamer support:", "YES" if "GStreamer: YES" in cv2.getBuildInformation() else "NO/UNKNOWN")
PY输出里必须看到 YES,否则后面的 cv2.CAP_GSTREAMER 会失败。
4. OpenCV 读 CSI(采集链路)
bash
python3 - <<'PY'
import cv2
cap_str = (
"nvarguscamerasrc sensor-id=0 ! "
"video/x-raw(memory:NVMM),width=1280,height=720,framerate=30/1 ! "
"nvvidconv ! video/x-raw,format=BGRx ! "
"videoconvert ! video/x-raw,format=BGR ! "
"appsink drop=true max-buffers=1"
)
cap = cv2.VideoCapture(cap_str, cv2.CAP_GSTREAMER)
if not cap.isOpened():
raise SystemExit("OpenCV 打开 CSI 失败")
ok_count = 0
for _ in range(120):
ok, _ = cap.read()
if ok:
ok_count += 1
cap.release()
print("read ok frames:", ok_count)
PY5. OpenCV + GStreamer 推流(UDP/H264)
运行推流端(发送到本机 5600):
bash
python3 - <<'PY'
import cv2
width, height, fps = 1280, 720, 30
host, port = "127.0.0.1", 5600
cap_pipeline = (
"nvarguscamerasrc sensor-id=0 ! "
f"video/x-raw(memory:NVMM),width={width},height={height},framerate={fps}/1 ! "
"nvvidconv ! video/x-raw,format=BGRx ! "
"videoconvert ! video/x-raw,format=BGR ! "
"appsink drop=true max-buffers=1"
)
push_pipeline = (
"appsrc ! "
f"video/x-raw,format=BGR,width={width},height={height},framerate={fps}/1 ! "
"videoconvert ! "
"x264enc tune=zerolatency speed-preset=ultrafast bitrate=2000 key-int-max=30 ! "
"h264parse ! rtph264pay config-interval=1 pt=96 ! "
f"udpsink host={host} port={port} sync=false async=false"
)
cap = cv2.VideoCapture(cap_pipeline, cv2.CAP_GSTREAMER)
wr = cv2.VideoWriter(push_pipeline, cv2.CAP_GSTREAMER, 0, float(fps), (width, height), True)
assert cap.isOpened(), "cap open failed"
assert wr.isOpened(), "writer open failed"
while True:
ok, frame = cap.read()
if not ok:
break
wr.write(frame)
PY另开一个终端做拉流验证(这个需要显示,ssh远程终端中会执行失败):
bash
gst-launch-1.0 -v udpsrc port=5600 \
caps="application/x-rtp, media=video, encoding-name=H264, payload=96" ! \
rtph264depay ! avdec_h264 ! videoconvert ! autovideosink sync=false如果只验证流是否正常到达(不依赖本地显示/OpenGL),用下面的命令:
bash
gst-launch-1.0 -v udpsrc port=5600 \
caps="application/x-rtp, media=video, encoding-name=H264, payload=96" ! \
rtph264depay ! avdec_h264 ! fakesink sync=false当 fakesink 正常但 autovideosink 崩溃时,通常说明是显示 sink 问题,不是推流链路问题。
6. 接入后端
把相机采集函数 + HTTP 接口 + 启动脚本三件事拼起来,就能复用这条 CSI 方案。
6.1 后端最小接口设计建议
建议至少提供 2 个接口:
GET /api/health:服务健康检查GET /api/camera/mjpeg:输出 multipart MJPEG 画面(浏览器可直接<img src=...>)
可选再加:
GET /api/live-result:采集固定帧数后跑一次算法,返回 JSON 结果
6.2 Python 侧相机采集核心(可直接复用)
python
import cv2
def csi_pipeline(sensor_id=0, w=1280, h=720, fps=30):
return (
f"nvarguscamerasrc sensor-id={sensor_id} ! "
f"video/x-raw(memory:NVMM),width={w},height={h},framerate={fps}/1 ! "
"nvvidconv ! video/x-raw,format=BGRx ! "
"videoconvert ! video/x-raw,format=BGR ! "
"appsink drop=true max-buffers=1"
)
def open_csi():
cap = cv2.VideoCapture(csi_pipeline(), cv2.CAP_GSTREAMER)
if not cap.isOpened():
raise RuntimeError("无法打开 CSI 摄像头")
return cap
# 返回一个可用的视频捕获对象cap,后续可以用cap.read()读帧6.3 serve_api.sh 启动脚本模版(Jetson 可用)
把下面内容保存为你项目根目录的 serve_api.sh:
bash
#!/usr/bin/env bash
set -euo pipefail
SCRIPT_DIR="$(cd "$(dirname "${BASH_SOURCE[0]}")" && pwd)"
cd "$SCRIPT_DIR"
# 1) 基础环境(全局 Python)
PYTHON="${PYTHON:-python3}"
PORT="${PORT:-8000}"
# 2) CUDA / Jetson 常见路径(让 torch / triton 更稳)
prepend_env_path() {
local var_name="$1"
local val="$2"
local old="${!var_name:-}"
case ":$old:" in
*":$val:"*) ;;
*) export "${var_name}=${val}${old:+:$old}" ;;
esac
}
prepend_env_path LD_LIBRARY_PATH "/usr/local/cuda/targets/aarch64-linux/lib"
prepend_env_path PATH "/usr/local/cuda/bin"
if [ -f "/usr/local/cuda/include/cuda.h" ]; then
export CUDA_HOME="/usr/local/cuda"
prepend_env_path CPATH "/usr/local/cuda/include"
prepend_env_path C_INCLUDE_PATH "/usr/local/cuda/include"
fi
if [ -x "/usr/local/cuda/bin/ptxas" ]; then
export TRITON_PTXAS_PATH="/usr/local/cuda/bin/ptxas"
fi
# 3) CSI 参数(可按需覆盖)
export MOCK_RPPG_CSI_SENSOR_ID="${MOCK_RPPG_CSI_SENSOR_ID:-0}"
export MOCK_RPPG_CSI_CAPTURE_WIDTH="${MOCK_RPPG_CSI_CAPTURE_WIDTH:-1920}"
export MOCK_RPPG_CSI_CAPTURE_HEIGHT="${MOCK_RPPG_CSI_CAPTURE_HEIGHT:-1080}"
export MOCK_RPPG_CSI_DISPLAY_WIDTH="${MOCK_RPPG_CSI_DISPLAY_WIDTH:-960}"
export MOCK_RPPG_CSI_DISPLAY_HEIGHT="${MOCK_RPPG_CSI_DISPLAY_HEIGHT:-540}"
export MOCK_RPPG_CSI_FRAMERATE="${MOCK_RPPG_CSI_FRAMERATE:-30}"
# 4) 启动 FastAPI(把 your_backend.app:app 改成你的入口)
exec "$PYTHON" -m uvicorn your_backend.app:app --host 0.0.0.0 --port "$PORT"赋予执行权限并启动:
bash
chmod +x ./serve_api.sh
bash ./serve_api.sh6.4 验证后端是否真的接上 CSI
- 浏览器打开:
http://127.0.0.1:8000/api/health - 浏览器打开:
http://127.0.0.1:8000/api/camera/mjpeg- 或者在同一网段下的其他电脑的浏览器上,用
IP:端口来访问
- 或者在同一网段下的其他电脑的浏览器上,用
- 若实现了
live-result,再验证算法接口输出
在日志里打印:
- 当前使用的 GStreamer 管道字符串
cap.isOpened()结果- 每秒读帧计数(FPS)