卡尔曼滤波需要定义系统模型(状态转移方程和观测方程)以及噪声参数。根据你提供的两组数据,我假设一个常见的场景:
系统状态:待测物理量的真实值(假设为常数或缓慢变化,采用随机游走模型)。
测量数据 (5.2, 5.8, 6.8, 9.0)用于估计初始状态 和初始协方差。
实测数据 (6.1, 6.2, 5.2, 6.8)作为观测值序列,依次进行滤波更新。
目标:基于前4个时刻的观测,预测第5个时刻的状态。
| 步骤 | 公式 | 作用 |
|---|---|---|
| 预测 | x_pred = x_{k-1} |
根据上一时刻估计,预测当前时刻的状态(常数模型) |
P_pred = P_{k-1} + Q |
预报当前预测的不确定性(上一时刻不确定 + 过程噪声) | |
| 计算增益 | K = P_pred / (P_pred + R) |
动态平衡预测值和测量值:K 越大越信任测量,越小越信任预测 |
| 更新状态 | x_k = x_pred + K(z_k - x_pred) |
用测量值修正预测值,得到当前最优估计 |
| 更新协方差 | P_k = (1 - K)P_pred |
降低估计的不确定性(因为引入了新的测量信息) |
1. 参数设定
过程噪声方差 Q :反映状态随时间变化的随机性。无先验知识时取小值,例如
Q = 0.01。测量噪声方差 R :反映观测值的可信度。可用测量数据的方差估计,计算得
R ≈ 2.09,但为了滤波更信任观测,这里取R = 0.1(实际可根据传感器精度调整)。初始状态估计 x₀ :取测量数据的平均值
(5.2+5.8+6.8+9.0)/4 = 6.7。初始协方差 P₀ :取测量数据的方差
( (5.2-6.7)² + ... + (9.0-6.7)² ) / 4 ≈ 2.09。
2、详细计算过程
已知基础参数
k=1 时刻的计算
表格中 k=1 行:
x_pred=6.7,P_pred=2.10,K=0.9545,x_k=6.1273,P_k=0.0956k=2 时刻的计算
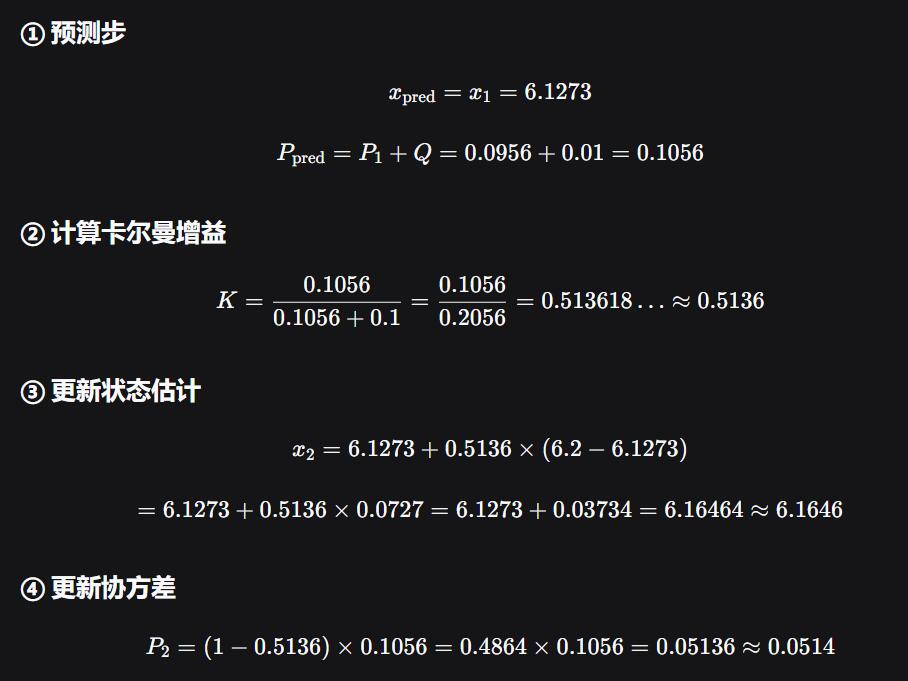
使用上一时刻的结果:x1=6.1273,P1=0.0956,观测 z2=6.2。
表格中 k=2 行:
x_pred=6.1273,P_pred=0.1056,K=0.5136,x_k=6.1646,P_k=0.0514
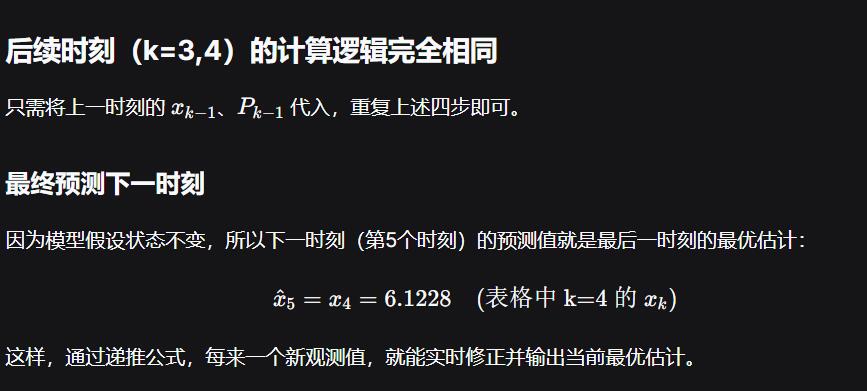
3. 逐时刻计算
| 时刻 k | 观测 z_k | 预测 x_pred | P_pred | 增益 K | 更新后 x_k | 更新后 P_k |
|---|---|---|---|---|---|---|
| 0 (初值) | - | 6.7 | 2.09 | - | 6.7 | 2.09 |
| 1 | 6.1 | 6.7 | 2.10 | 0.9545 | 6.1273 | 0.0956 |
| 2 | 6.2 | 6.1273 | 0.1056 | 0.5136 | 6.1646 | 0.0514 |
| 3 | 5.2 | 6.1646 | 0.0614 | 0.3804 | 5.7977 | 0.0380 |
| 4 | 6.8 | 5.7977 | 0.0480 | 0.3243 | 6.1228 | 0.0324 |
所以,x5=6.12