作者 |肖恩
编辑 |德新
华为乾崑智驾ADS从1迭代至5,版本在变,功能在扩,但主线始终没有偏离------让辅助驾驶在更多真实道路场景里,比人类驾驶更稳定、更少犯错,完成从功能型辅助驾驶到具备自主思考、全局预判与极致安全的高阶自动驾驶体系的进化。
这也是华为乾崑在4月23日发布ADS 5时所打出的口号"ADS 5,为自动驾驶而来"的底气。
ADS 5的关键词依然是安全,可以说安全是华为乾崑智驾的技术底色。不过,此次技术升级,他要回答的问题将更加具体:在那些最难、最险、最不常见的场景里,系统如何看得更准、判断更稳、反应更快?
华为乾崑在回答这个问题的同时,也意味着他将把智能辅助驾驶的竞争继续推向下一个阶段:安全如何被持续进化、验证,并最终转化为用户的信任。
一、ADS 5 让安全进入新阶段
华为乾崑智驾迭代到ADS 4时,就已经形成了较完整的日常出行体验。高速 NCA、城区 NCA、车位到车位,把辅助驾驶从结构化道路延展到复杂城市道路,再进一步贯通出发、行驶、泊入的完整链路,形成了相对稳定的安全体验,但智能辅助驾驶的安全上限,并未止步,而是继续向那些低频、高危、数据稀缺、反应窗口极短的长尾场景纵深发展。
城市路口的无保护左转,车辆需要在对向车流、行人、两轮车之间判断通行时机;大车遮挡或路侧盲区之后,行人、两轮车可能突然进入行驶路径。这些场景不是每天都会发生,但一旦出现,就会同时考验系统的三种能力:能否在数据稀缺的场景中保持泛化,能否在不规则交通行为中完成意图判断,能否在极短时间窗口里稳定执行决策。
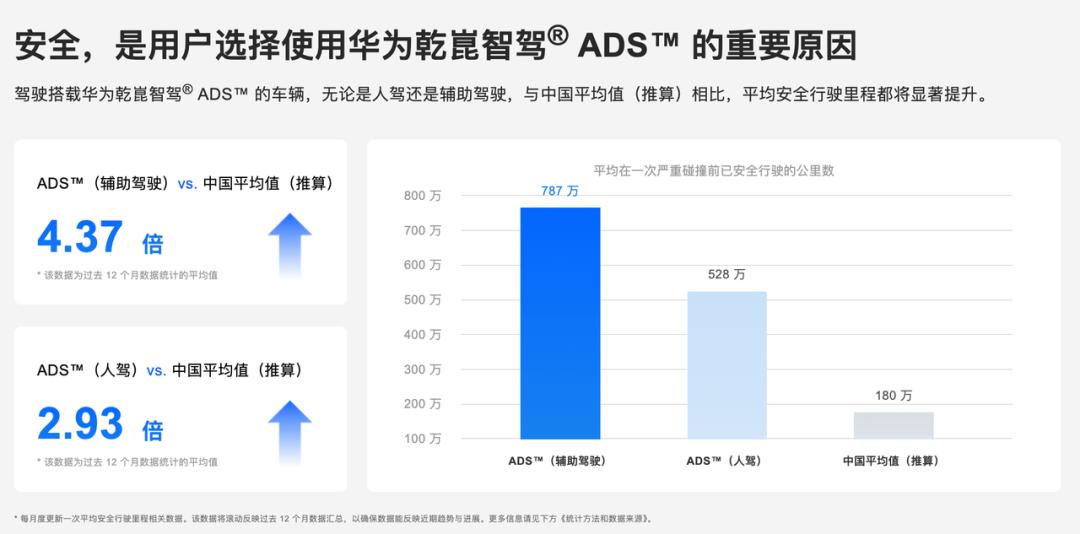
靳玉志在 4 月的智能电动汽车发展高层论坛上曾给出一个判断:**要达到 L4 级别的自动驾驶,让人完全离开驾驶位,系统至少要比人类驾驶安全 10 倍。**目前 ADS 在辅助驾驶状态下,安全性已经达到人驾的 4.37倍,人驾加 AEB 状态下达到 2.93 倍。
"10倍安全"对应的是一个更高阶的评价体系。过去行业常用功能覆盖率、接管率、总里程数来描述智能辅助驾驶进步,但越接近 L3、L4,安全评价就越不能只看"能跑多少场景",而要看系统在低频、高危、不规则场景里能否持续减少错误。
ADS 5在架构、系统底座、安全体系这三层能力方面聚力发展,构成了 ADS 5 安全进化的主干。它们共同指向同一个目标:让辅助驾驶不只是覆盖更多场景,而是在真正困难的场景里,建立更高等级的安全确定性。
二、WEWA 2.0:系统开始学会预判风险
智能驾驶系统的难题,正在从"识别静态世界"走向"理解动态博弈"。
车辆、行人、车道线、红绿灯,是道路环境中的显性信息。但真正影响安全决策的,往往是它们背后的行为意图。系统只有看见目标还不够,还要判断这些目标下一步可能如何行动。
这正是 WEWA 2.0 的核心价值:面对无保护左转、高速汇入、遮挡横穿等更复杂的不确定场景,让系统从"看见交通参与者",进一步走向"理解交通参与者", 并提前判断风险会从哪里出现。
这背后有两个关键变化。
第一,是云端训练更接近真实道路。
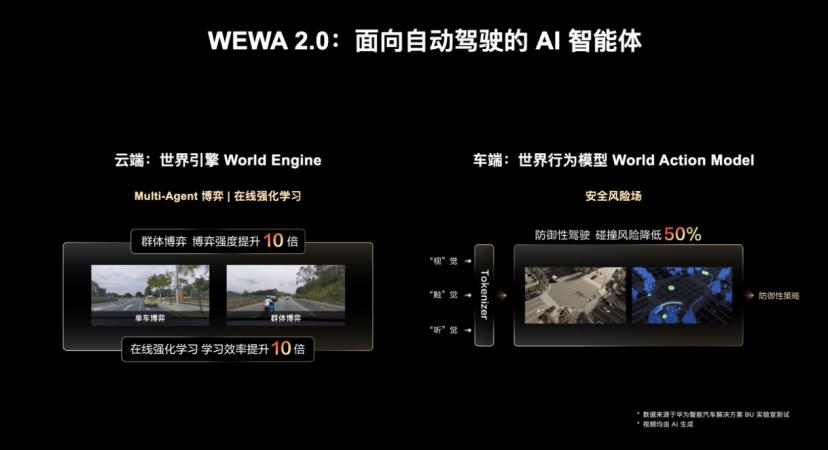
WEWA 2.0 引入 Multi-Agent 多智能体博弈机制,让仿真环境中的每个交通参与者都拥有自己的行为意图和驾驶风格。
真实道路从来不是规则完美的棋盘:旁车可能突然加塞,行人可能犹豫后折返,两轮车可能从遮挡区域切入。多智能体博弈的意义,就是让系统在云端不断面对这些不完全理性、不完全规则的交通参与者,学习更稳妥的应对策略。
在这次发布会上,华为乾崑公布通过 Multi-Agent 机制,云端模型的训练强度提升了 10 倍;同时通过在线强化学习实现"边生成、边学习、边验证",训练效率也可提升 10 倍。
第二,是车端决策开始引入安全风险场。
它不是只判断"眼前有没有障碍物",而是把周围环境中的潜在风险转化为实时变化的风险热力图:哪里需要减速,哪里要预留空间,哪里可能出现尚未显性的危险。
一辆大车停在路边,系统不仅要识别这辆车,还要判断大车后方和侧后方是否存在行人、两轮车突然出现的可能,并提前调整速度和路径。
安全风险场可将碰撞风险降低 50%。
这也是 ADS 5 所强调的防御性驾驶:不是等危险完全出现后再反应,而是在风险还没有显性化之前,就先给系统留出安全余量。
进化到 WEWA 2.0,华为乾崑 ADS 的价值不只是提升通行效率,而是把这种防御性驾驶进一步写进系统决策,让车辆在复杂交通博弈中做出更稳妥的安全选择。
这也是它作为面向自动驾驶 AI 智能体的关键一步。
三、乾崑 OS:安全不只是算力问题,也是确定性问题
如果说 WEWA 2.0 解决的是"怎么判断风险",那么乾崑 OS 要解决的,是判断之后能不能稳定执行。
智能辅助驾驶系统并不是只靠一个"大脑"在工作。车辆行驶时,车内有大量计算任务同时运行。导航、交互这类任务可以排队,可以延后几十毫秒;但制动、转向、避让这些安全任务不行。
对智能辅助驾驶来说,安全从来不只是"算得快",更是"关键任务绝不能等"。
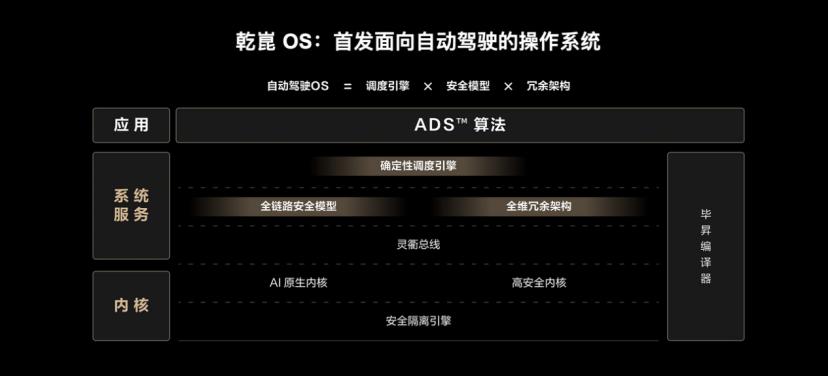
乾崑 OS 的核心,就是为这类安全任务建立更确定的执行通道。通过确定性调度引擎和灵衢总线等技术,车内信号时延降低 30%,紧急 Cut-In 等低时延任务也能获得更及时的响应。
这背后的关键词是**"确定性"**。
在传统理解里,系统性能往往被简化为算力大小。但自动驾驶真正需要的,不只是更大的算力池,而是更可控的任务调度机制。也就是说,当安全任务和非安全任务同时出现时,系统必须知道谁优先、谁让路、谁必须在毫秒级内完成。
一个直观的例子是高速 Cut-In。旁车突然压线切入,留给后车的处理窗口很短。此时系统要完成的不只是识别目标,还包括风险判断、轨迹预测、路径规划、制动或转向控制。如果其中任何一个环节被其他任务挤占,最终都会反映到车辆动作上。
乾崑 OS 的价值,就是把这种关键链路的响应变得更可预期。它不是简单让系统"跑得更快",而是让紧急任务在复杂计算环境中获得更高优先级和更稳定的执行路径。
这种稳定性最后会落到车辆动作上。系统越早完成风险判断和控制指令下发,车辆就越早进入制动、转向或避让状态。
在高速场景里,毫秒不是抽象指标。车辆以 130km/h 行驶时,每秒约前进 36 米。系统响应时间每压缩几十毫秒,换来的都是额外的制动距离和避让空间。对用户来说,这不是操作系统里的工程细节,而是关键时刻多出来的安全余量。
判断和调度之后,安全还要落到车辆控制本身。
华为乾崑数字底盘引擎 HUAWEI XMC 通过六合一全域融合技术,把底盘状态信息与 ADS 的融合感知信息结合起来,控车精准度提升 30%。这意味着,在紧急避让、湿滑路面、弯道稳定等场景中,系统不只是知道"该怎么做",还要更精准地把制动、转向和车身控制动作执行出来。
这也是 ADS 5 安全进化中容易被忽视的一层:智能辅助驾驶不是只靠算法判断,最终还要落实到车辆能不能稳稳地完成动作。
除了低时延和控车精度,乾崑 OS 还强调全链路安全模型和全维冗余架构。前者解决的是数据从传感器、计算平台到控制执行过程中是否可信、是否完整的问题;后者解决的是系统在局部异常情况下,能否保持稳定运行和安全兜底。
这也意味着,ADS 5 的安全进化并不只发生在算法层。AI 可以让系统更会判断,但只有底层操作系统、通信总线、任务调度、底盘控制和冗余架构一起工作,判断才有可能被稳定地转化成车辆动作。
自动驾驶越往高阶走,越不是单点能力的竞争,而是系统工程的竞争。乾崑 OS 的意义,正在于把"安全"从模型能力进一步下沉到底层系统:让该优先的任务优先,让该确定的响应确定,让关键时刻的每一毫秒都不被浪费。
四、CAS 5.0:六维安全,把安全扩展到全时域

WEWA 2.0 和乾崑 OS 解决了"提前判断"和"确定执行",那么 CAS 5.0 要做的,是把这些能力放进一套更完整的主动安全体系里。
在 ADS 4 阶段,CAS 4.0 已经建立了五维安全框架:全时速、全方向、全目标、全天候、全场景。它对应的是用户在日常驾驶中能感知到的主动安全能力:不同速度下的制动,不同方向上的避险,对车辆、行人、异形障碍物等目标的识别,以及雨雾、复杂路况下的安全辅助。
到了 ADS 5,CAS 从 4.0 升级到 5.0,在原有五维安全基础上加入了"全时域安全"。这不是简单多加一个维度,而是把安全从车辆自身当前能看到、能处理的空间范围,进一步延展到时间维度:风险发生前能不能提前知道,风险发生中能不能主动避险,风险发生后能不能继续守护。
全时域安全的第一层能力,是把风险感知前移到本车视野之外。
过去,车辆面对前方事故、落石、塌方这类风险,主要依赖自车传感器和驾驶员的视野。但很多高危情况的难点恰恰在于:等你真正看见时,反应窗口已经很短。ADS 5 引入全时域安全后,当前方出现事故、落石等路况险情时,系统可以通过云端向附近搭载 ADS 的车辆发送预警。
对用户来说,车辆不再只是"看见眼前的路",也能提前"听见前方的风险"。
在风险发生过程中,CAS 5.0 继续强化原有五维安全能力。全时速、全方向、全目标、全天候、全场景这些维度,落到用户体验里,就是系统在更多速度区间、更多来车方向、更多目标类型和更多天气路况下,都尽量保留主动安全介入的可能。
这种介入也不只是"能不能刹住"。在一些紧急场景里,单靠制动可能已经不够,系统还需要结合转向、车身稳定控制和路径规划,在安全边界内寻找更合适的避险方式。主动安全的能力,最终看的是制动、转向、识别和稳定控制能不能协同。
全时域安全还把守护延伸到了风险发生之后。
驾驶员失能辅助就是一个例子。2025 年首发的驾驶员失能辅助功能,在 ADS 5 上进一步升级:当系统判断驾驶员无法继续驾驶时,车辆可以前往高速服务区、收费站等就近安全区域,方便驾驶员获得更及时的救助。
CAS 5.0 承担的,是把 ADS 5 的底层安全能力转化为用户可感知的防护体验。 WEWA 2.0 让系统更会预判风险,乾崑 OS 让关键响应更确定,而 CAS 5.0 把这些能力落实到事前预警、事中避险和事后守护之中。
安全不再只是某一次刹停或避让,而是从风险出现之前,就开始介入,并一直延伸到风险结束之后。
五、100亿公里之后,安全进入长期验证阶段

截至 4 月 19 日,华为乾崑智驾 ADS 累计辅助驾驶里程已经突破 100 亿公里。
这个数字的分量,不只在于规模本身。它背后是不同城市、不同道路、不同天气、不同驾驶习惯下的真实出行,是大量无法在实验室里完全复现的复杂交通细节。智能驾驶系统见过的场景越多,经历过的问题越多,才越有机会把这些经验转化为下一轮算法、系统和安全策略的迭代。
车队规模同样重要。目前,华为乾崑智驾已覆盖超过 25 个车型品牌、50 多款车型,整车搭载量突破 170 万辆。装车量带来的不只是市场覆盖,也是一套持续运转的数据飞轮:更多车辆上路,意味着更多真实场景被看见、被验证、被反馈;系统再通过持续 OTA,把这些经验沉淀进下一次升级。
这也是智能辅助驾驶和传统汽车功能最大的不同。传统功能往往在交付时基本定型,而智能辅助驾驶系统的安全能力,必须在长期使用中不断进化。今天一辆车在雨夜路口遇到的复杂博弈,明天可能成为另一辆车更稳妥处理类似场景的经验来源。单车在路上行驶,背后参与的却是一套持续学习的系统。
华为这次把华为乾崑辅助驾驶系统的累计辅助驾驶里程放到官网实时刷新。这个动作的意义,不只是展示一个增长中的数字,而是把安全能力放进一个公开、长期、可追踪的坐标系里。
过去,很多智能辅助驾驶能力依赖演示、试驾和单次体验来建立认知;但安全真正需要的,是时间和规模共同沉淀出来的可信度。
"10 倍安全"的目标不可能靠某一个功能完成,也不可能通过一次升级直接抵达。它需要前面提到的每一层能力共同作用:WEWA 2.0 提升复杂交通中的风险预判,乾崑 OS 保证关键任务确定执行,CAS 5.0 把安全覆盖到事前、事中和事后,真实道路数据再把这些能力不断推向下一轮迭代。
ADS 5 真正要建立的,不是一次功能升级带来的新鲜感,而是用户长期使用中的安全感。
100 亿公里,是已经跑出来的真实道路经验;10 倍安全,是更高阶自动驾驶必须逼近的目标。连接两者的,是不断扩大的真实道路样本、持续演进的算法模型,以及一次次落到用户体验里的安全提升。
结语
智能辅助驾驶行业从不缺少"高难度动作"。
极窄路避让、城中村穿行、复杂路口博弈,这些场景能证明系统的能力边界,也容易形成传播。但对用户来说,真正决定他们是否长期打开辅助驾驶的,往往不是一次惊艳表现,而是系统能不能在日常和极端之间,始终给出稳定、可预期的安全表现。
这也是 ADS 5 这次升级最核心的指向:不把竞争停留在"能完成多复杂的动作",而是继续回到一个更朴素、也更难的问题------用户能不能放心使用。
功能展示能力边界,安全决定长期的信任。