前言
本示例详细讲解使用abaqus进行充气梁基于灵敏度拓扑优化的操作过程。
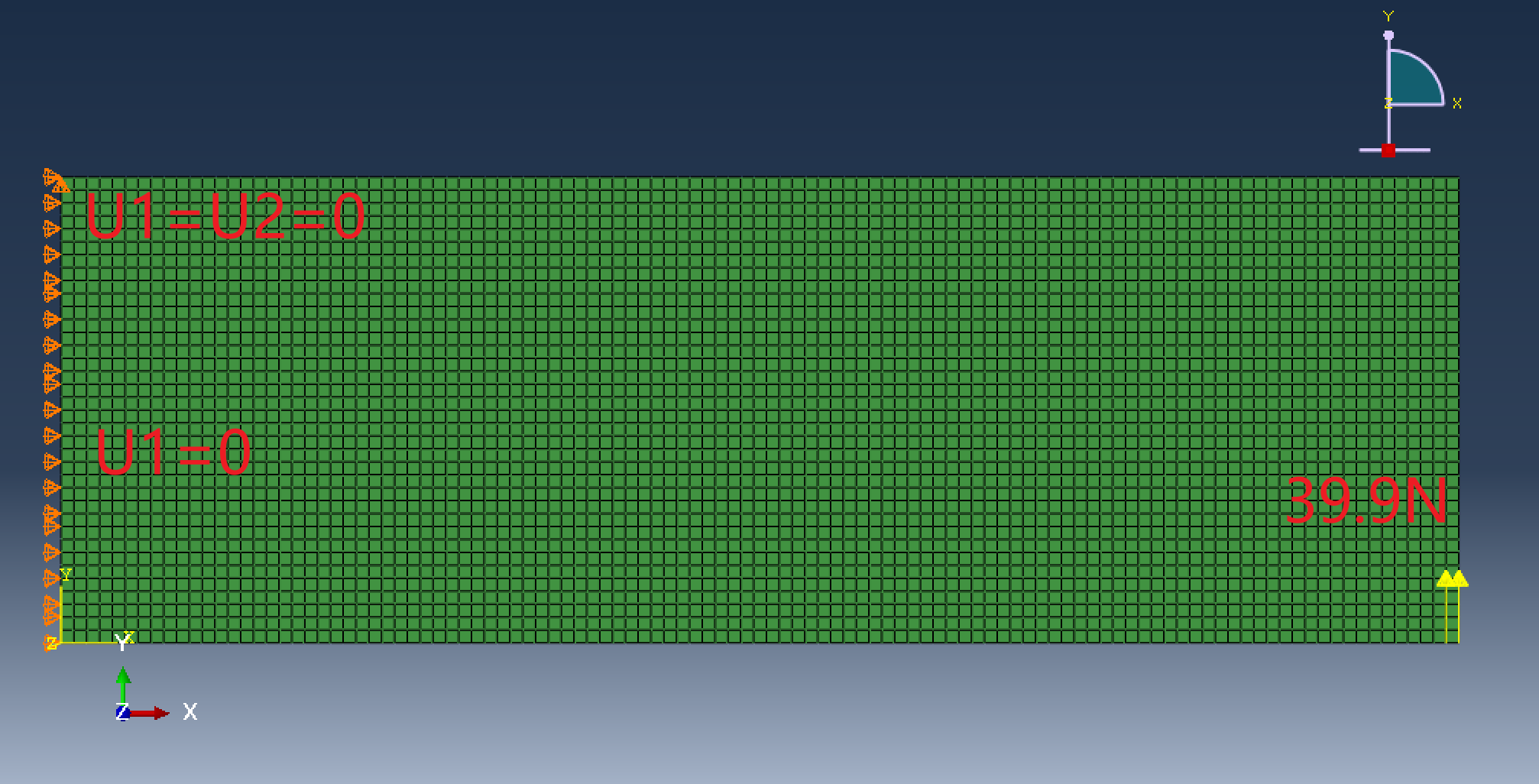
本实例是一个弯曲梁,模型左侧所有节点约束X 轴方向位移,模型左上角节点同时约束Y 轴方向位移。在模型右下角节点沿Y轴正方向施加40N的力。
本页讨论
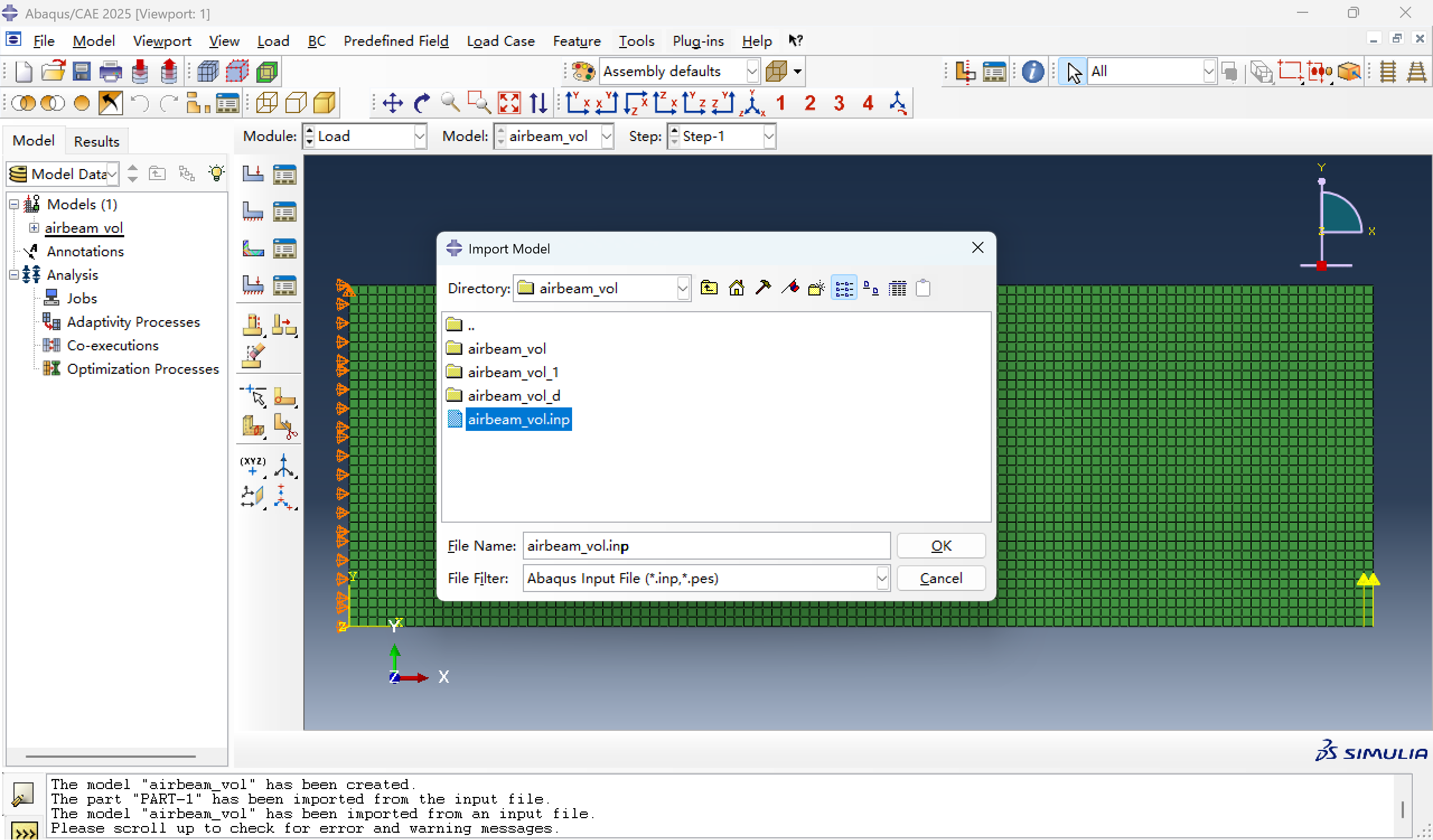
一、导入airbeam_vol.inp文件
二、设置优化
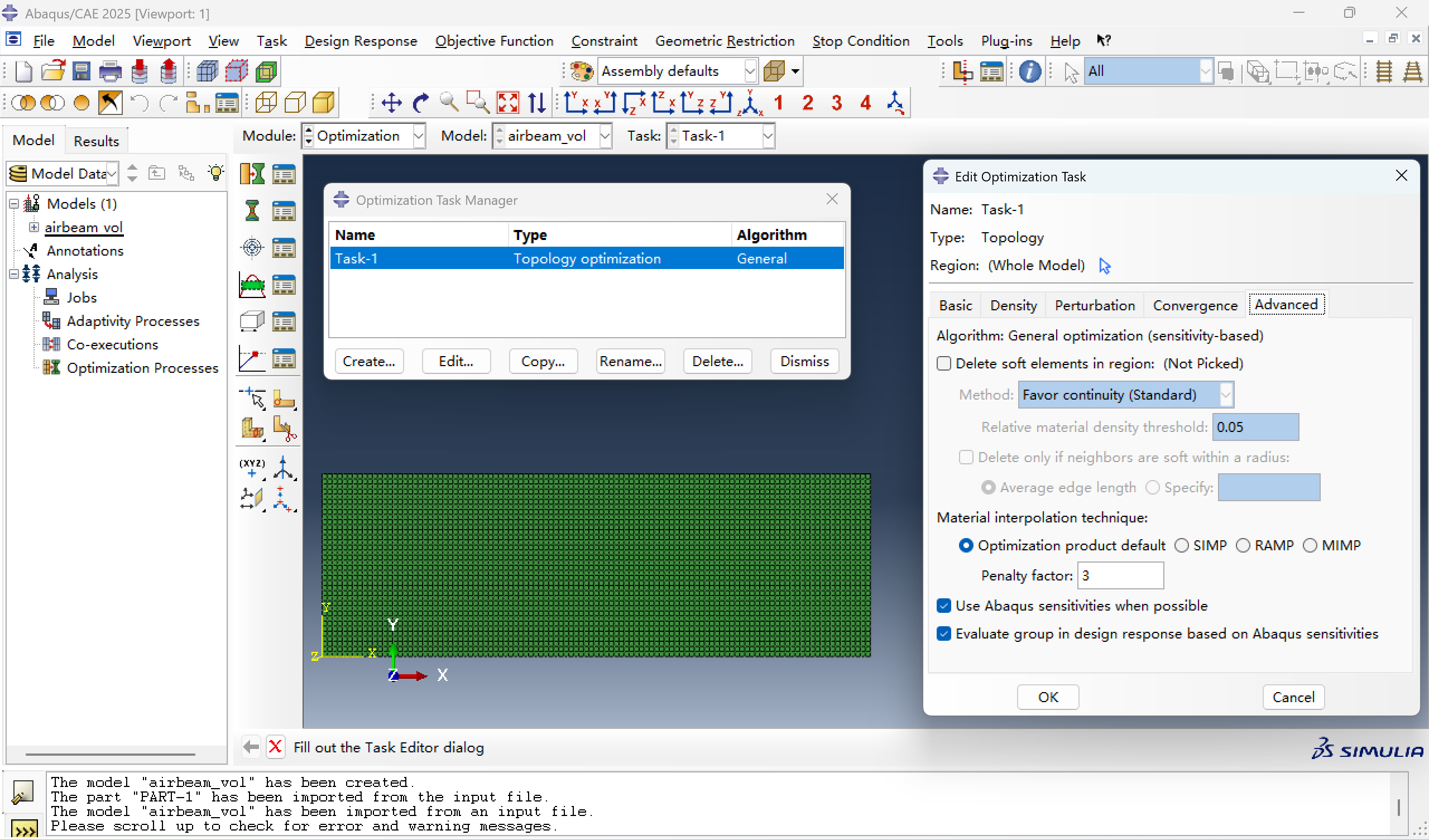
1.创建优化任务
在OPTIMIZATION模块,创建基于灵敏度的拓扑优化任务Task-1。
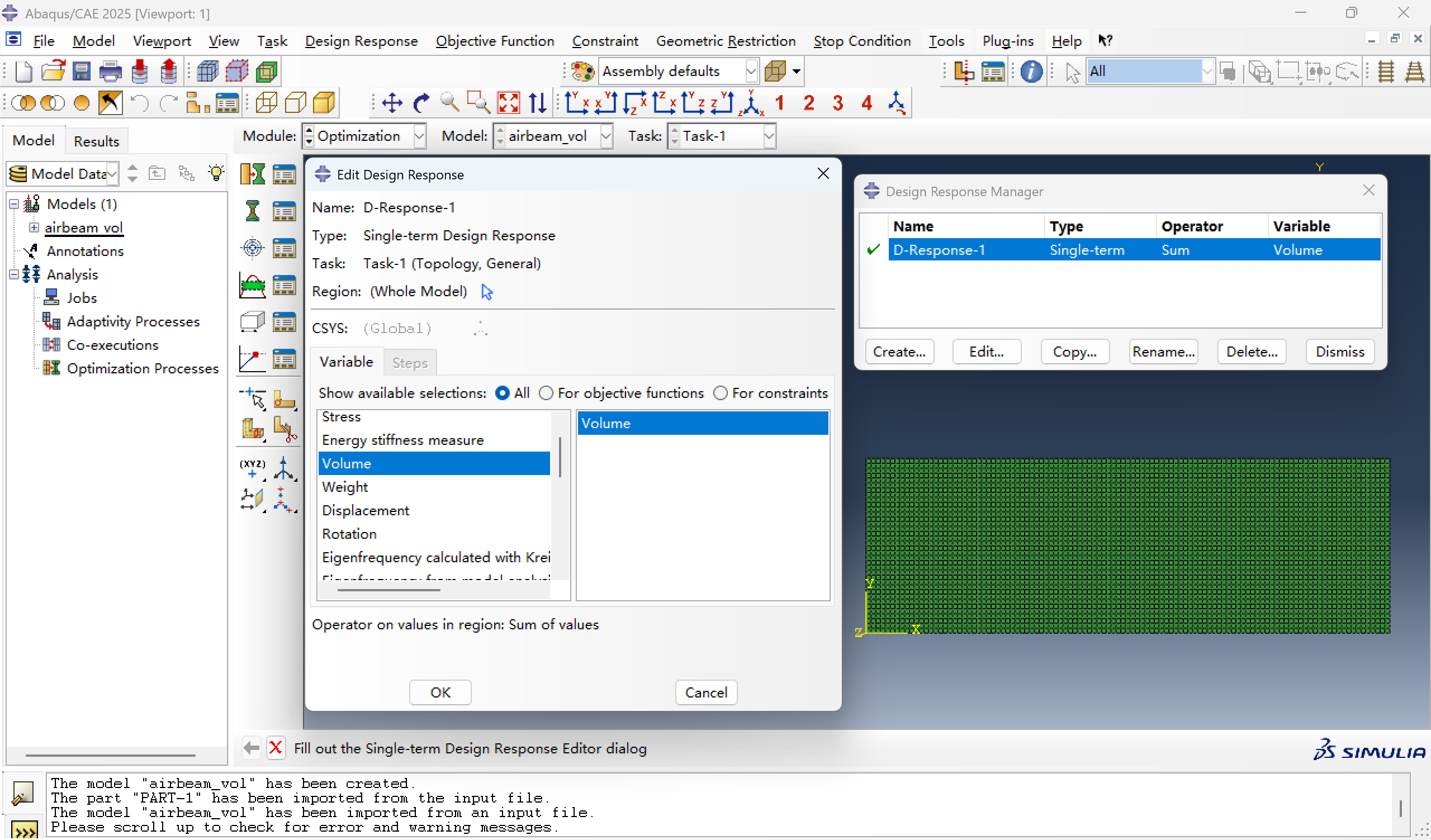
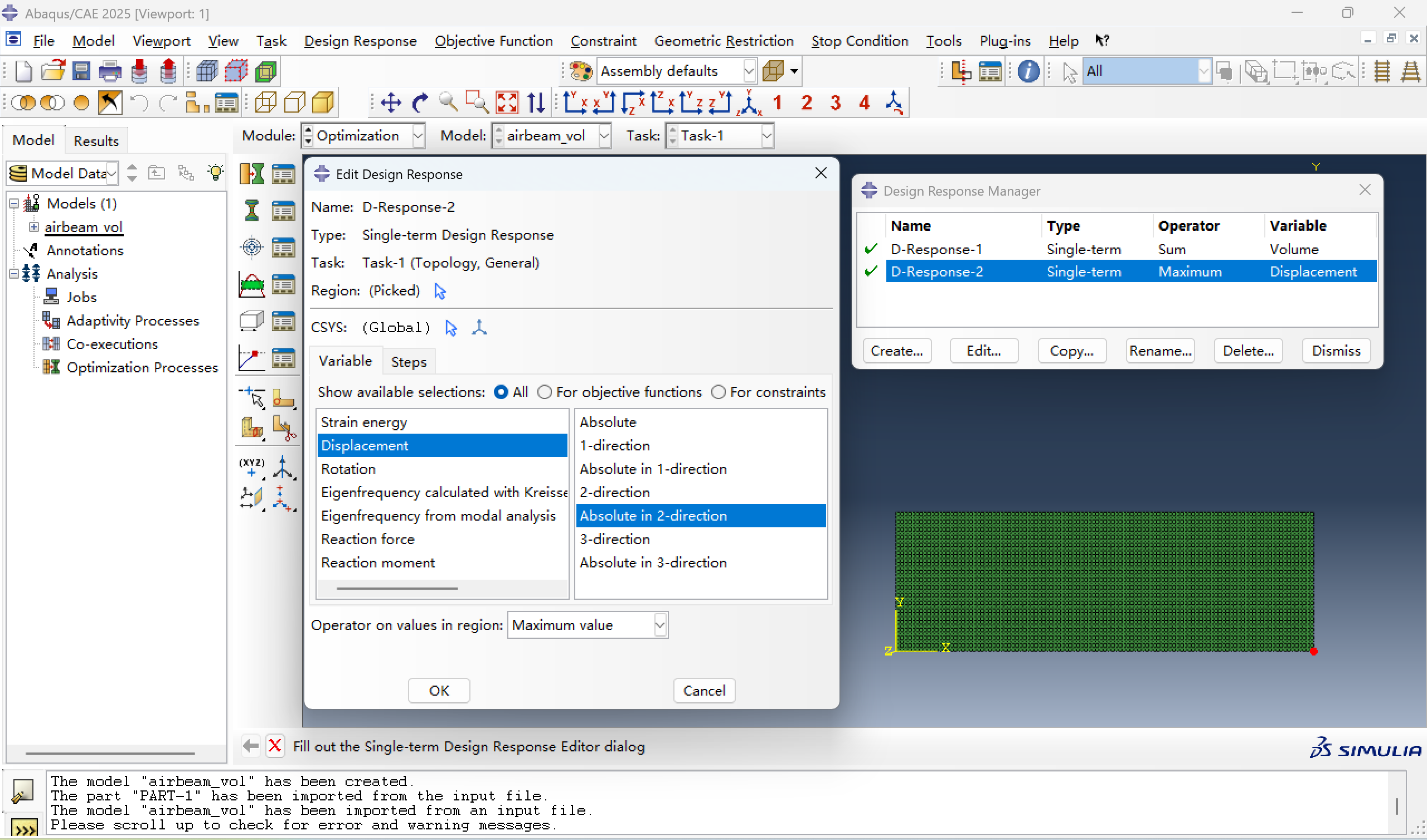
2、创建设计响应
- 定义结构体积的设计响应:设计区域中所有单元的体积总和D-Response-1。
- 定义节点位移的设计响应:节点 110 沿Y方向的最大绝对位移D-Response-2。
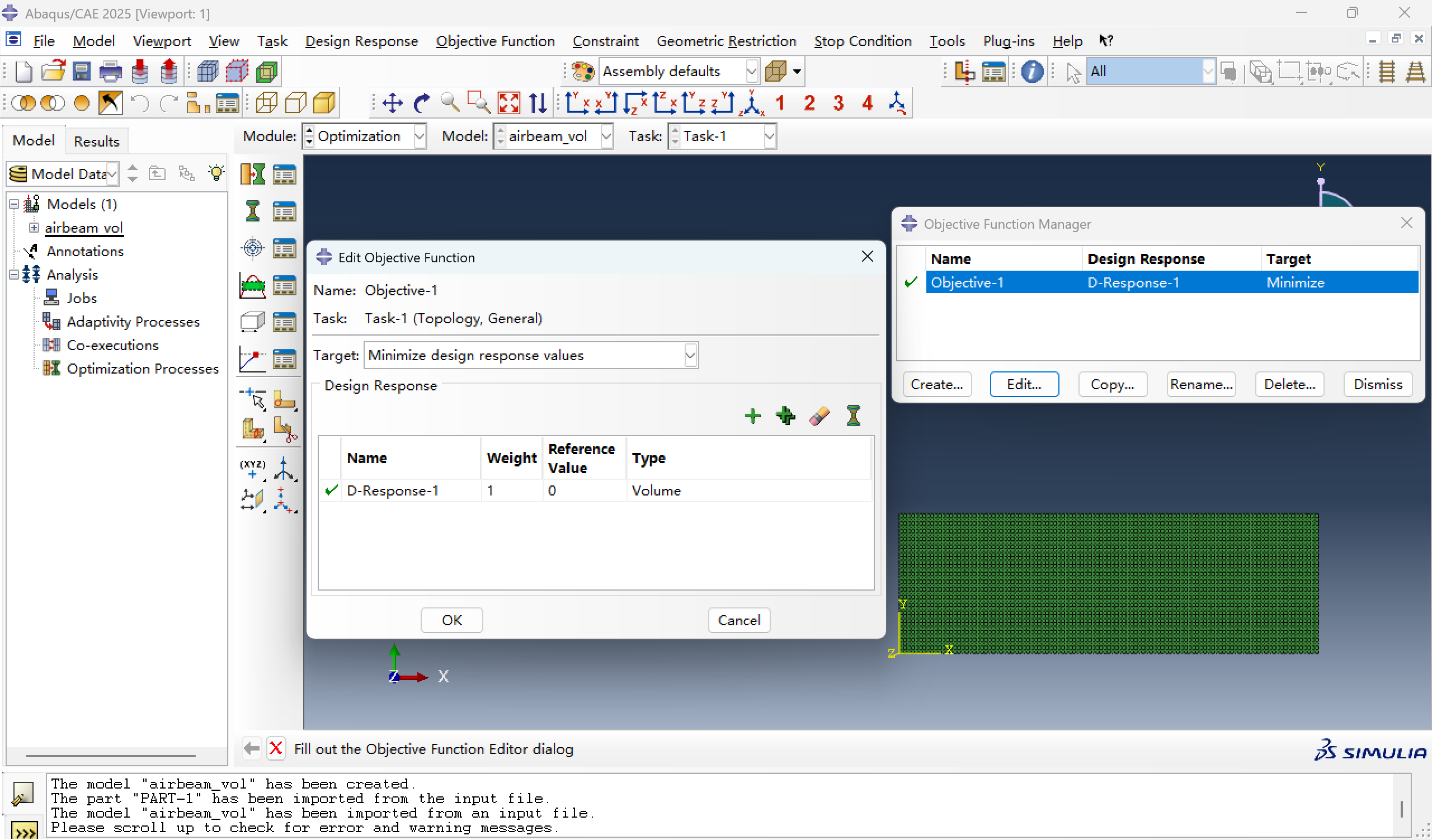
3、创建目标函数
最小化模型的体积总和响应D-Response-1
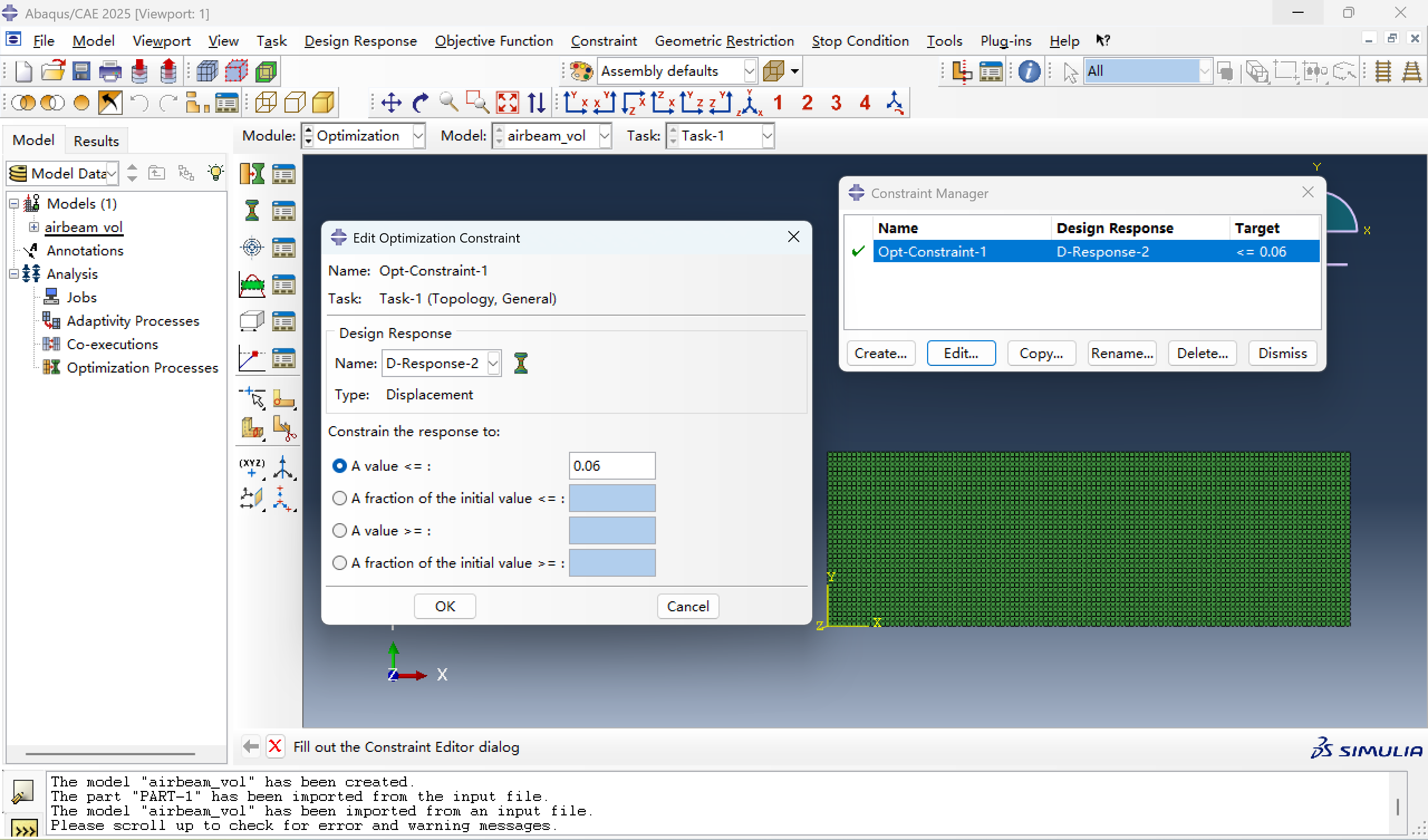
4、创建约束
限制节点 110 沿Y方向的最大绝对位移响应D-Response-2不超过 0.06mm。
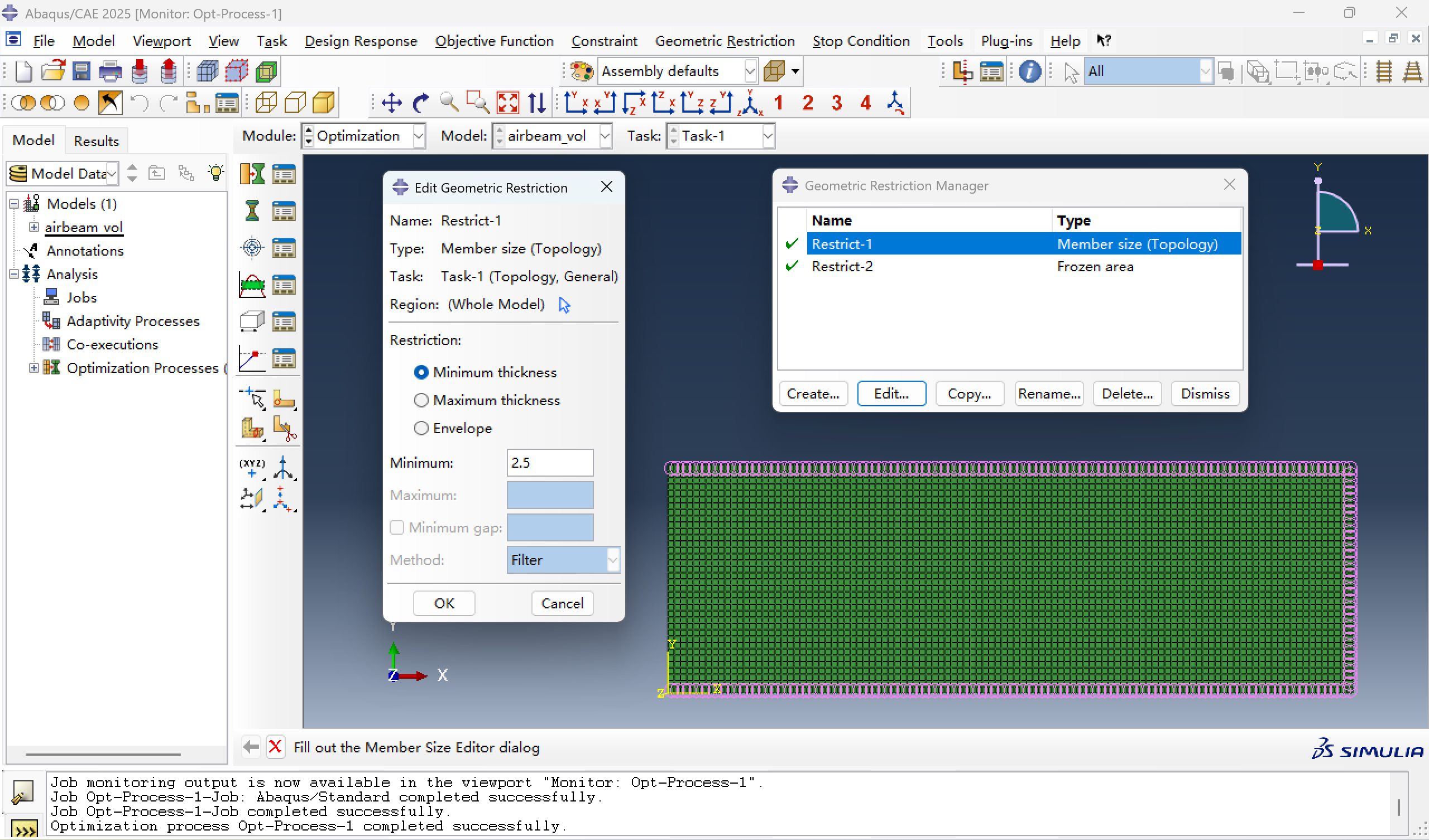
5、创建几何约束
Restrict-1:限制最小单元尺寸为2.5
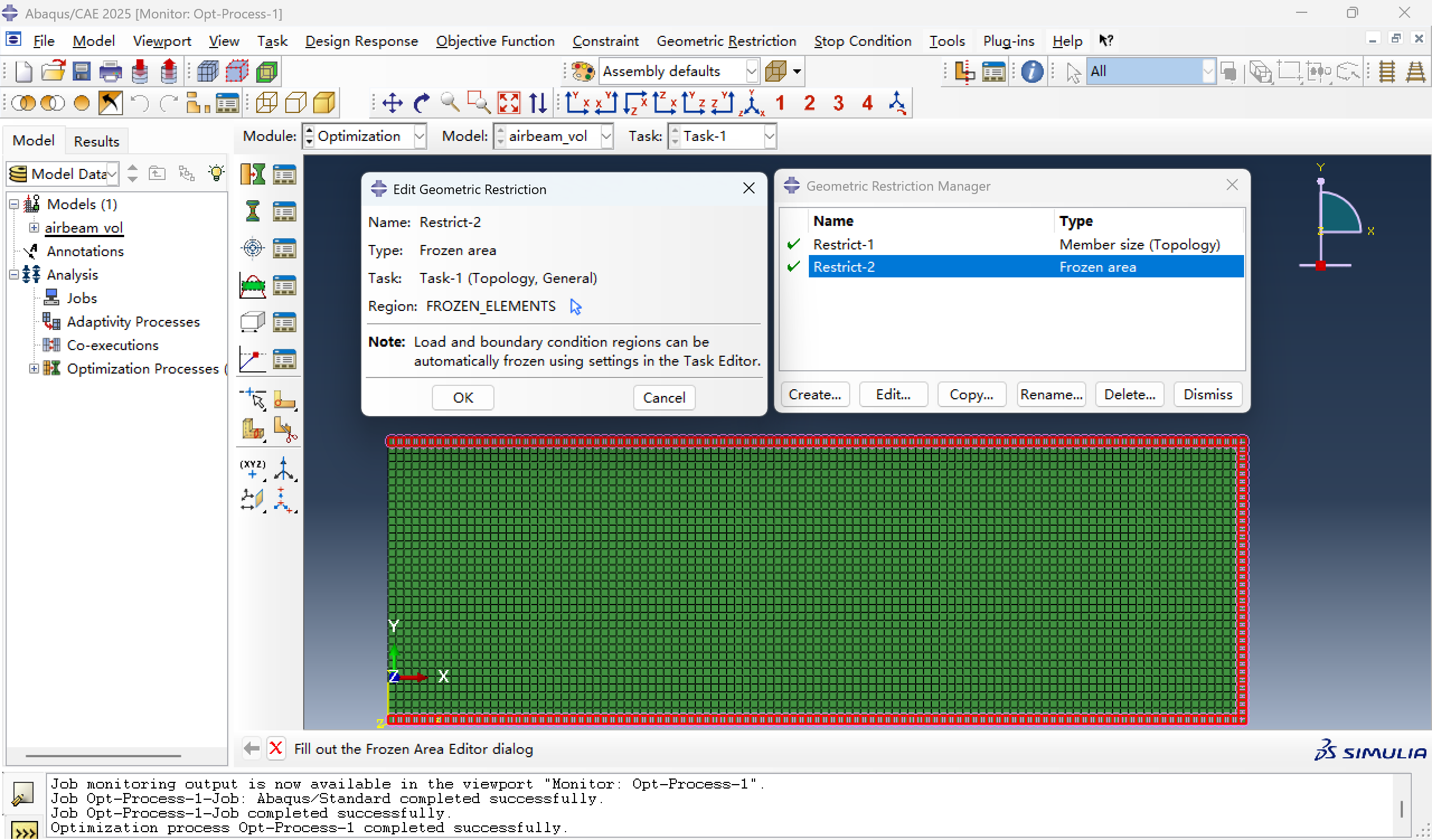
Restrict-2:模型表面的单层单元设置为冻结层
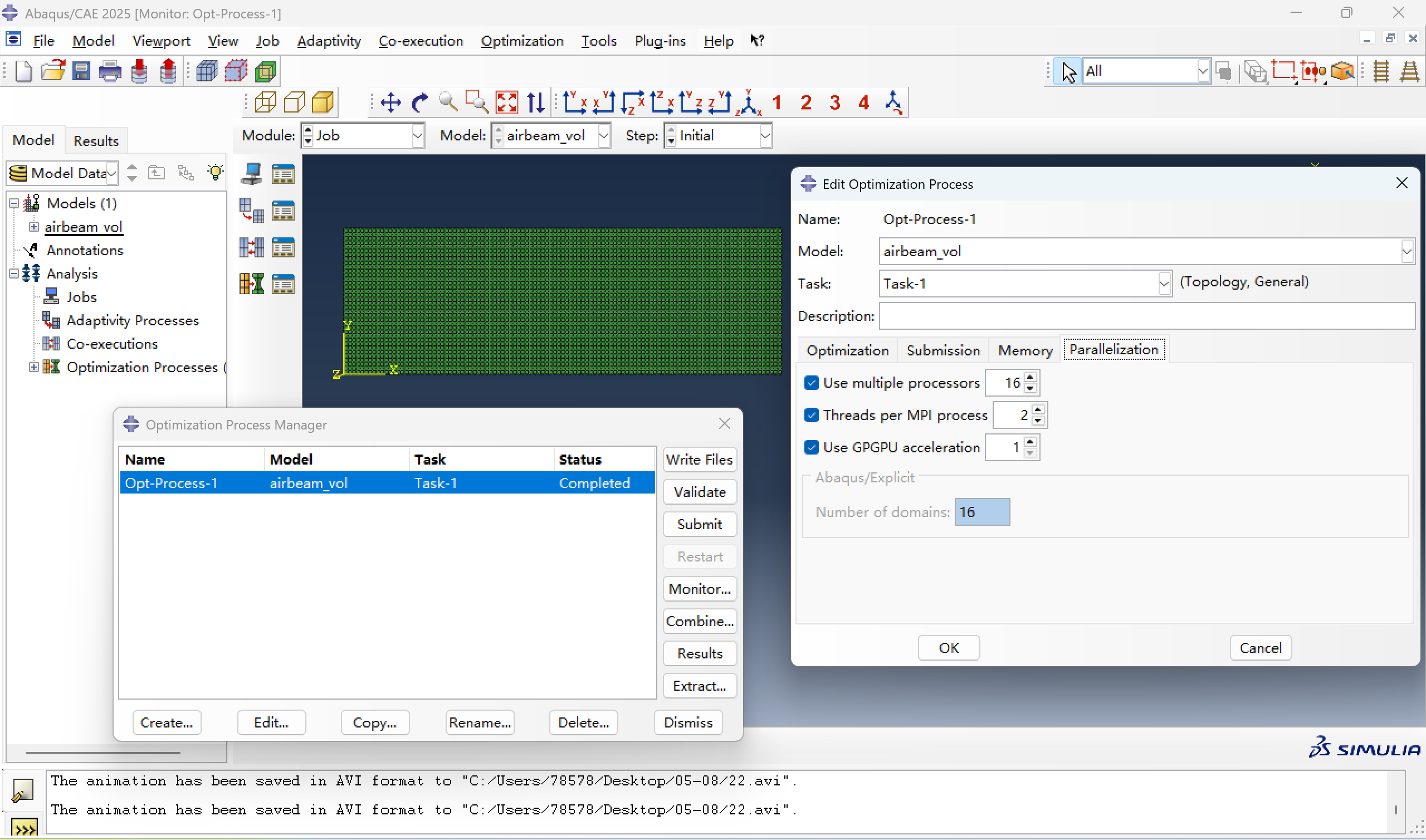
5、创建并提交优化进程
在JOB模块,创建优化进程Opt-Process-1。
6、优化结果