过去十年,AI 学会了 "读" 和 "写";而未来十年,AI 必须学会 "看"、"建" 和 "做"。
近两年,一个原本属于计算机图形学与三维重建领域的技术 ------ 3D Gaussian Splatting(3DGS)(Kerbl et al., 2023)------ 正在快速 "出圈"。从学术论文到工业系统,其演进速度远超预期。

更值得关注的是,这种演进不再局限于 "渲染更快",而开始指向一个更宏大的问题:机器如何在真实世界中构建、维护并使用一个可计算的三维表示。
一个正在发生的信号:从渲染技术到世界级系统
2026年4月,World Labs 发布了 Spark 2.0,对基于 3DGS 的 Web 端渲染系统进行了系统级升级。

与早期工作不同,Spark 2.0 的目标不再只是 "高效渲染单个场景",而是:在任意设备上,流式加载并实时呈现一个可扩展的三维世界。
其核心技术包括:
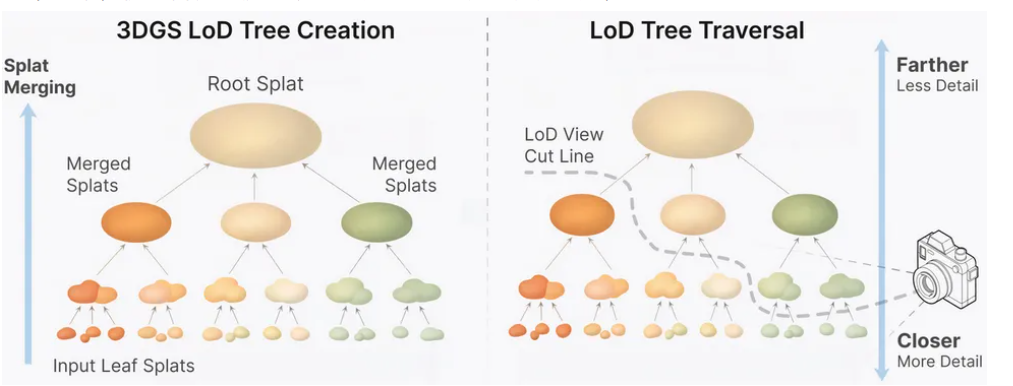
**连续层次细节(Level-of-Detail, LoD)系统:**基于高斯层次结构(splat tree),动态选择渲染子集,使计算复杂度与视点相关而非与场景规模相关;
**渐进式流式加载(Progressive Streaming):**按视点优先级逐步加载 3DGS 数据,实现"边加载边交互";
**虚拟内存机制(Virtual Memory):**在固定 GPU 内存预算下调度海量高斯数据,使浏览器端也能访问超大规模三维场景。
从系统角度看,这些设计带来了三个关键变化:
1.渲染复杂度与场景规模解耦
2.数据可跨设备流式访问
3.多对象可统一组织于同一空间
这意味着:3DGS 正在从 "单场景表示方法",演进为"可组合的三维世界表示系统"。
值得注意的是,Spark 最初即服务于 "世界模型(World Model)" 方向的探索。在这一背景下,3DGS 不再只是图形学技术,而开始承担 "世界状态表达" 的角色。
一、为何需要 "三位一体"?具身智能的三块拼图
如果将视角进一步拉高,可以看到一个逐渐清晰的技术共识:通用具身智能依赖三类能力的统一 ------ 认知、空间与行动

这对应着一个具有现实可行性的技术组合:具身智能 ≈ 多模态 LLM(认知)+ 3DGS(空间) + Flow-based 生成模型(行动),对应 "决策 --- 表征 --- 控制" 的经典分层结构。
1. 多模态LLM:机器的 "认知中枢"
当人类发出指令 "把那个红色的杯子拿给我",系统首先需要完成:语义理解、跨模态对齐、任务分解。多模态模型(如 GPT-4V、Qwen-VL、LLaVA)已经在这一层面表现出强大能力(Liu et al., 2023)。
但其输出仍然是符号层信息,无法直接回答:杯子的位置与姿态、是否被遮挡、抓取所需的物理约束。这些问题需要一个空间层表示来承载。
2. 3DGS:机器的"空间眼"
传统三维表示存在明显取舍:Mesh/点云几何明确但表达能力有限;NeRF 表达连续但推理成本高(Mildenhall et al., 2020)。
3DGS 提供了一种新的平衡:实时渲染能力、显式结构(高斯集合)、可微分优化、可扩展属性(语义/动态)。
从表示学习角度看:3DGS 是一种介于显式几何与隐式场之间的半显式可微表示(Jun-seong Kim et al., 2025)。近期工作进一步探索将语义信息注入 3DGS,使其从 "可视化表示" 走向 "可查询空间结构"。
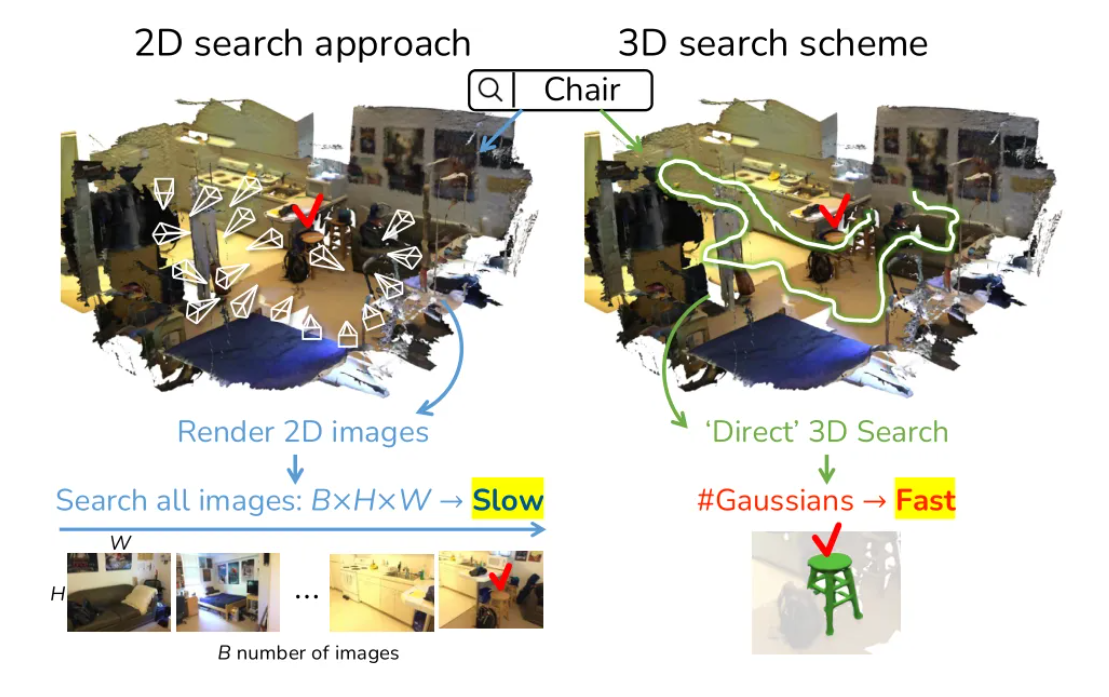
换句话说:3DGS 正在成为一种 "空间数据库",向着一种 "可查询的空间表示" 演进。
3. Flow-based 生成模型:机器的 "运动神经"
在行动层,问题转化为:如何生成连续且可控的动作。
扩散策略方法(如 Diffusion Policy)已验证其表达能力(Chi et al., 2023),但推理成本较高。Flow Matching 提供了一种更高效的路径(Lipman et al., 2022):将生成过程建模为概率流,使用常微分方程 (ODE, Ordinary Differential Equation) 进行连续求解,支持更少步甚至单步生成。结合 Transformer 架构(如 DiT),可在保证表达能力的同时显著降低延迟(Peebles & Xie, 2023)。

从方法论上看:Flow Matching 正在成为连接扩散模型与连续流模型的关键桥梁。
二、从感知到行动:具身智能的闭环结构
将三者组合,可以形成一个完整闭环:指令 → LLM(任务解析) → 3DGS(空间状态) → Flow模型(动作生成) → 执行 → 感知反馈 → 更新
这一架构具有三个关键特征:闭环(Closed-loop)、实时(Real-time)、可微(Differentiable)。

三者分工明确:LLM 负责决策与规划,3DGS 负责世界建模,Flow-based 模型负责控制动作生成。
三、技术趋势:从分散方案走向统一范式
从学术界到工业界,不同技术路径正在收敛:多模态模型统一认知能力,三维表示强化空间理解,生成模型驱动连续控制。其共同指向是:构建一个统一的 "认知 --- 空间 --- 行动" 系统。
而 3DGS 的出现,使 "空间层" 首次具备与其他两层匹配的工程可行性。
四、工程现实:3DGS 落地仍面临挑战
尽管前景清晰,但工程实践仍存在门槛:理论复杂(体渲染、球谐函数等)、工程链路长(SfM/MVS → NeRF → 3DGS)、性能优化困难(GPU 与数据结构)。
当前开源生态的普遍问题是:"能跑通" 不等于 "能理解、能优化"。
五、写在最后:一条仍在展开的技术路径
三维重建技术正在经历一次重要转变:从离线建模工具,到在线感知系统,再到具身智能基础设施。
3DGS 只是这一过程中的关键节点,但其背后是一个更深层的趋势:世界模型正在从抽象走向可计算、可交互、可实时。
对于希望系统掌握这一领域的读者,我们在《三维重建技术与实践:基于NeRF与3DGS》中,尝试从多视图几何、神经表示到工程实现进行完整梳理。这本书更关注:技术体系、原理理解、工程贯通。

京东:https://item.jd.com/15356282.html
当当:https://product.dangdang.com/30039018.html
如果你正在思考空间智能或具身系统,这或许是一条值得深入的路径。