CSIYOLO:当目标检测遇上信道状态信息------一种即插即用的通感一体化散射体定位框架
你无需修改通信波形、无需增加额外硬件,仅凭单基站-单用户之间估计出的CSI,就能像YOLO识别图像中的物体一样,精准定位环境中的散射体。这是怎么做到的?
摘要
通感一体化(ISAC)被认为是6G的关键使能技术之一,其核心愿景是让通信信号在传输数据的同时"感知"环境。在众多感知任务中,散射体感知(包括三维环境重建和散射体定位)尤为重要:它不仅能为低空经济、自动驾驶提供环境认知,还能反哺通信系统,实现信道预测、波束管理、阻塞控制等智能化操作。
然而,现有散射体感知方法存在两大瓶颈:一是多数方案需要修改波形、增加雷达模块或多节点协作,与现有通信系统兼容性差;二是传统信号处理算法(如MUSIC、DFT)对散射体数量未知、信道估计误差、虚假目标干扰极为敏感,定位精度有限。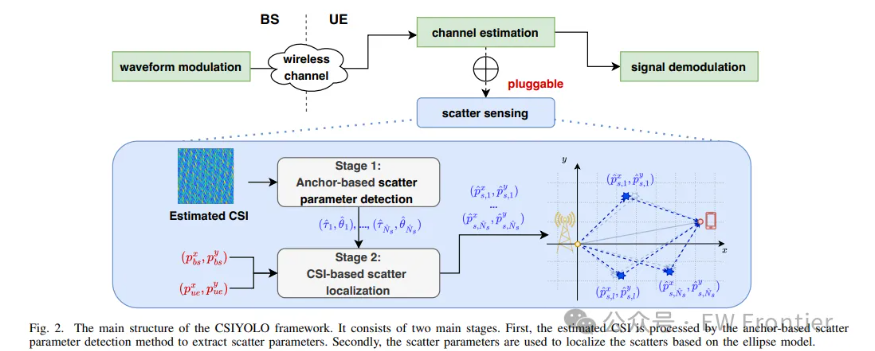
针对上述挑战,本文介绍的最新工作CSIYOLO,首次将计算机视觉中的YOLO目标检测思想引入CSI散射体感知。核心贡献包括:
- 即插即用的框架设计:仅利用单基站-单用户估计出的CSI矩阵,无需任何硬件或波形修改,可作为插件直接嵌入现有通信系统。
- 锚点式散射参数检测:将角度-延迟域的信道矩阵视为二维图像,每个矩阵元素作为一个"锚点",通过轻量化神经网络同时预测散射体的坐标偏移和置信度,并自适应去除虚假目标。
- 任务导向的网络优化:针对CSI矩阵的周期性、能量扩散特性,设计了圆形卷积、卷积分解、多尺度锚点检测等结构,显著提升精度并降低计算量。
- 噪声注入训练策略:在训练过程中逐步增加高斯噪声,使模型对信道估计误差具有强鲁棒性。
实验表明,CSIYOLO在散射体数量未知(5~10个)、噪声干扰等复杂条件下,定位F1-score达0.97以上,定位RMSE低于0.2米,远超MUSIC-FFT和低秩张量分解等传统方法,且参数量仅为YOLOv5的千分之三。
一、引言:通信系统为什么需要"看见"散射体?
1.1 通感一体化的本质
未来的6G网络不再只是"传数据"的管道,而是希望利用无处不在的无线信号,同时完成环境感知。想象一下:你的手机在下载视频的同时,还能通过回波"看到"周围的车辆、无人机、甚至人的手势------这就是通感一体化(ISAC)的愿景。
散射体(Scatter)是环境中导致信号反射、衍射的物体,例如建筑物墙壁、车辆、行人等。精准定位散射体是环境感知的核心任务,其意义体现在两个方面:
- 赋能新兴应用:低空经济中无人机需要感知障碍物;自动驾驶中车辆需要识别周边物体;智能工厂中机器人需要定位工件。
- 辅助通信优化 :知道散射体的位置后,基站可以预测信道变化、提前调整波束、规避阻塞,甚至重构非视距信道------这就是"环境辅助通信"的概念。
1.2 现有方法的痛点
当前散射体感知主要分为三类:
- 雷达专用波形(如FMCW):精度高,但需要额外硬件,成本高,与现有通信系统不兼容。
- 多节点协作定位:利用多个基站或用户之间的传输时延差来解算散射体位置。但需要严格的节点同步和关联匹配,且易产生虚假目标。
- 基于CSI的参数估计 (如MUSIC、DFT):仅利用单基站-用户对,较为灵活。但这类方法存在根本性缺陷:
- 需要预先知道散射体数量,否则性能崩溃;
- 对信道估计误差极为敏感;
- 受限于网格分辨率,定位精度有限;
- 多径干扰容易产生虚假目标(Ghost Target),难以区分。
1.3 一个大胆的跨域思路
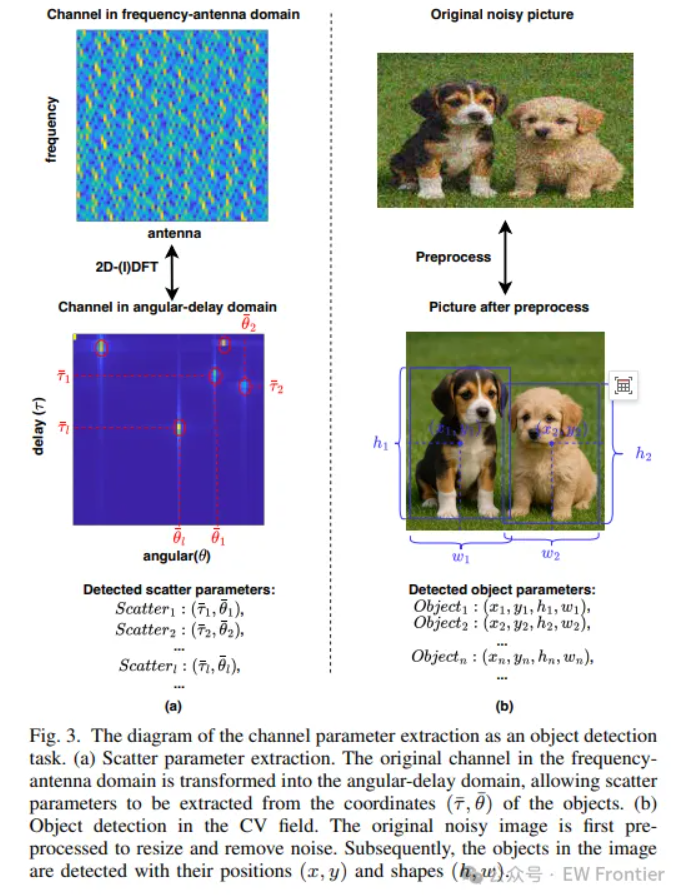
既然CSI矩阵在角度-延迟域上可以看作一幅二维图像,而图像中的"亮点"对应着不同路径的散射体,那么能不能用计算机视觉中成熟的目标检测技术来直接"检测"这些散射体呢?
这正是CSIYOLO的核心思想:将散射参数提取转化为目标检测问题,并用YOLO式的锚点回归方法,实现端到端的散射体定位。
二、系统模型与问题形式化
2.1 系统架构
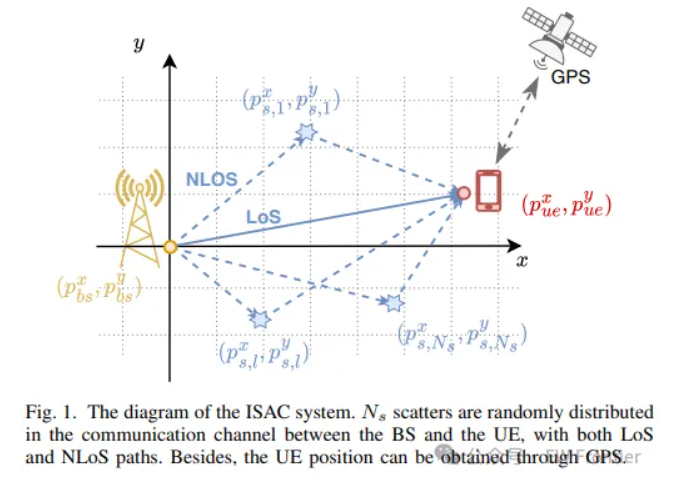
考虑一个单小区ISAC系统,包含:
- 一个基站(BS),配备 N t = 64 N_t = 64 Nt=64 根均匀线性阵列(ULA)天线,位置已知 p b s = ( 0 , 0 ) \mathbf{p}_{bs} = (0,0) pbs=(0,0)。
- 一个用户设备(UE),单天线,位置可通过GPS获得 p u e \mathbf{p}_{ue} pue。
- 环境中随机分布 N s N_s Ns 个散射体( N s N_s Ns 未知,在5~10之间随机),每个散射体位置 p s , l \mathbf{p}_{s,l} ps,l 未知。
基站使用OFDM波形,子载波数 N c = 1024 N_c = 1024 Nc=1024,中心频率 f 0 = 28 f_0 = 28 f0=28 GHz,子载波间隔 Δ f = 100 \Delta f = 100 Δf=100 MHz。下行信号经散射体和直射路径到达UE,UE通过导频训练估计出信道矩阵 H ∈ C N c × N t \mathbf{H} \in \mathbb{C}^{N_c \times N_t} H∈CNc×Nt。
2.2 信道模型与散射参数
根据Saleh-Valenzuela模型,第 n c n_c nc 个子载波上的信道向量为:
h n c = ∑ l = 0 N s α l e − j 2 π τ l ( f 0 + n c Δ f ) a T ( θ l ) \mathbf{h}{n_c} = \sum{l=0}^{N_s} \alpha_l e^{-j2\pi \tau_l (f_0 + n_c \Delta f)} \mathbf{a}_T(\theta_l) hnc=l=0∑Nsαle−j2πτl(f0+ncΔf)aT(θl)
其中 l = 0 l=0 l=0 表示直射径(LoS), l ≥ 1 l\ge1 l≥1 为非直射径(NLoS,即散射体反射路径)。每个路径有三个关键参数:
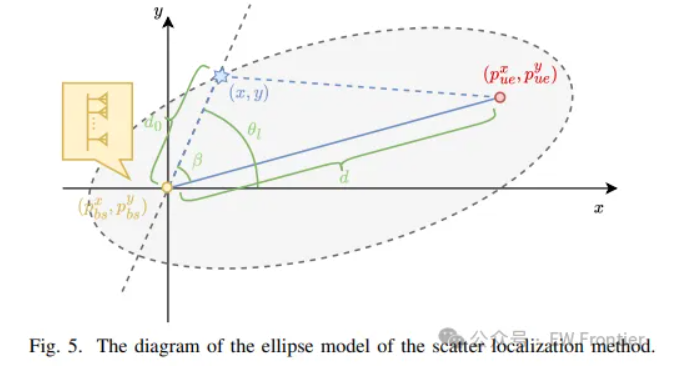
- 传输时延 τ l \tau_l τl:与散射体位置的关系满足椭圆方程(BS和UE为焦点)
- 离开角(AoD) θ l \theta_l θl:散射体相对于BS天线阵列的方向
- 复增益 α l \alpha_l αl
因此,如果能从CSI中准确估计出 ( τ l , θ l ) (\tau_l, \theta_l) (τl,θl),就能通过椭圆模型和角度直线唯一确定散射体的二维坐标。
2.3 挑战与动机
- 数量未知:传统MUSIC需要输入散射体数量,而实际环境中数量动态变化。
- 信道估计误差:实际CSI包含噪声和干扰,导致参数估计偏差。
- 虚假目标:多径叠加会在角度-延迟域产生虚假峰值,传统方法难以区分。
这就引出了本文的核心问题:能否设计一种不依赖先验数量、对噪声鲁棒、能自动剔除虚假目标的散射体定位方法? 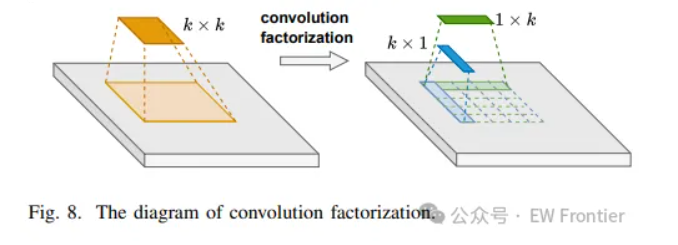
三、CSIYOLO方法详解
3.1 整体框架(两阶段)
CSIYOLO的结构如图2所示(原文图2),分为两个阶段:
- 锚点式散射参数检测 :将角度-延迟域的CSI矩阵输入神经网络,网络输出每个锚点预测的散射体坐标偏移和置信度。通过阈值和聚类去除虚假目标,得到估计的 ( τ ^ l , θ ^ l ) (\hat{\tau}_l, \hat{\theta}_l) (τ^l,θ^l)。
- 基于椭圆模型的散射体定位 :根据时延和角度,结合BS和UE的已知位置,解算出散射体的物理坐标。
3.2 从CSI到"图像":角度-延迟域变换
原始CSI矩阵 H ∈ C N c × N t \mathbf{H} \in \mathbb{C}^{N_c \times N_t} H∈CNc×Nt 在频率-天线域。通过二维逆离散傅里叶变换(2D-IDFT),转换到角度-延迟域:
H ~ = F a H F d \tilde{\mathbf{H}} = \mathbf{F}_a \mathbf{H} \mathbf{F}_d H~=FaHFd
其中 F a \mathbf{F}_a Fa 和 F d \mathbf{F}_d Fd 是DFT矩阵。变换后的矩阵 H ~ \tilde{\mathbf{H}} H~ 中,每个传输路径会汇聚成一个能量峰值 ,其坐标 ( τ ˉ l , θ ˉ l ) (\bar{\tau}_l, \bar{\theta}_l) (τˉl,θˉl) 与时延 τ l \tau_l τl 和角度 θ l \theta_l θl 存在确定的整数映射关系(式10-11)。因此,检测散射体等价于检测这个二维平面上的峰值点 。
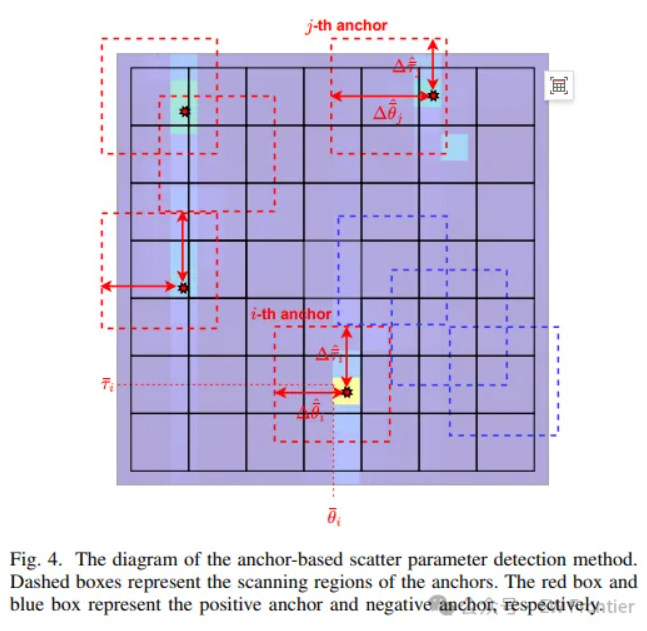
3.3 锚点检测机制(核心创新)
传统目标检测中,YOLO将图像划分为网格,每个网格负责预测其内部的物体。CSIYOLO借鉴这一思想,但做了重大修改以适应CSI的特性:
-
每个矩阵元素都是一个锚点 :对于位置 ( τ ˉ i , θ ˉ i ) (\bar{\tau}_i, \bar{\theta}_i) (τˉi,θˉi) 的锚点,它负责扫描其周围一个矩形区域(例如 32 × 32 32\times32 32×32 的范围)。如果该区域内存在真正的散射体峰值,锚点需要预测这个峰值相对于锚点自身坐标的偏移量 ( Δ τ ˉ ^ i , Δ θ ˉ ^ i ) (\Delta \hat{\bar{\tau}}_i, \Delta \hat{\bar{\theta}}_i) (Δτˉ^i,Δθˉ^i),同时输出一个置信度 C ^ i \hat{C}_i C^i 表示该预测的可信程度。
-
为什么不用边界框? 在CV中,物体有宽度和高度,需要预测包围盒。但CSI矩阵中的"散射体"只是一个点状峰值,没有形状。所以CSIYOLO只回归中心点偏移,简化了任务,提高了效率。
-
连续坐标预测 :由于锚点预测的是偏移量(连续值),最终得到的散射体坐标可以是小数,突破了DFT网格的离散分辨率限制,定位精度大幅提升(RMSE<0.2m)。

3.4 损失函数与正负样本
对于一个锚点,其训练标签包括:
- 是否存在散射体在该锚点的扫描区域内( C i = 1 C_i = 1 Ci=1 或 0 0 0)
- 若存在,真实的偏移量 ( Δ τ ˉ i , Δ θ ˉ i ) (\Delta \bar{\tau}_i, \Delta \bar{\theta}_i) (Δτˉi,Δθˉi)
损失函数为:
L = ∑ i ∈ P ( Δ τ ˉ \^ i − Δ τ ˉ i ) 2 + ( Δ θ ˉ \^ i − Δ θ ˉ i ) 2 − ρ ∑ i = 1 N a C i log C \^ i + ( 1 − C i ) log ( 1 − C \^ i ) L = \sum_{i \in \mathbb{P}} \left (\\Delta \\hat{\\bar{\\tau}}_i - \\Delta \\bar{\\tau}_i)\^2 + (\\Delta \\hat{\\bar{\\theta}}_i - \\Delta \\bar{\\theta}_i)\^2 \\right - \rho \sum_{i=1}^{N_a} \left C_i \\log \\hat{C}_i + (1-C_i)\\log(1-\\hat{C}_i) \\right L=i∈P∑(Δτˉ\^i−Δτˉi)2+(Δθˉ\^i−Δθˉi)2−ρi=1∑NaCilogC\^i+(1−Ci)log(1−C\^i)
其中 P \mathbb{P} P 是正锚点(扫描区域内有真实散射体),只对正锚点计算位置回归损失;所有锚点(正+负)都计算置信度损失(二分类交叉熵)。负锚点的存在迫使网络学会区分"有"和"无",从而自动抑制虚假目标。
3.5 自适应虚假目标去除
网络输出的候选散射体经过三个步骤清理:
- 粗过滤 :丢弃置信度低于阈值 t 1 = 0.5 t_1=0.5 t1=0.5 的检测。
- 空间合并 :如果多个检测的坐标距离小于 t d t_d td(例如2个像素),则只保留其中置信度最高的一个。
- 细过滤:计算剩余候选的置信度均值,将置信度低于"均值/3"的检测再丢弃。
这种自适应阈值策略比固定阈值更鲁棒,有效消除了多径产生的虚假峰值。实验表明,CSIYOLO的F1-score接近0.97,虚假目标极少。
3.6 网络结构:小型化与任务优化
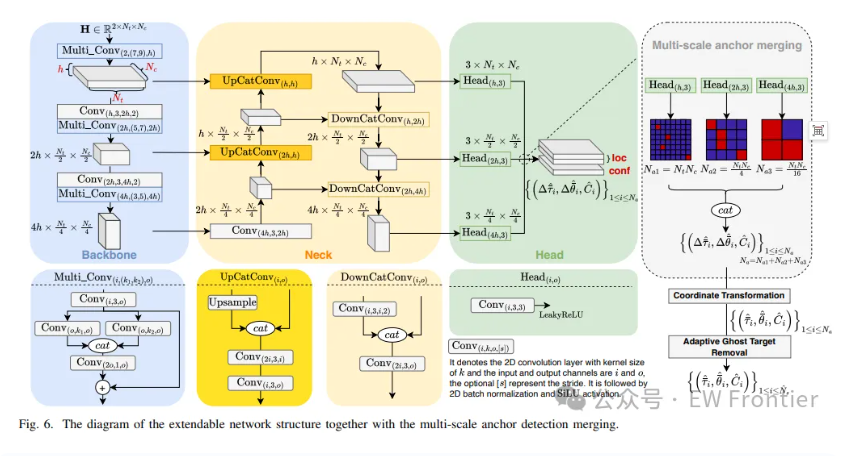
CSIYOLO的检测网络基于U-Net改进(图6),具有以下特点:
- 多尺度特征提取:在骨干网络中使用不同卷积核大小(如3×3、5×5)并行,捕获不同宽度的峰值扩散模式。
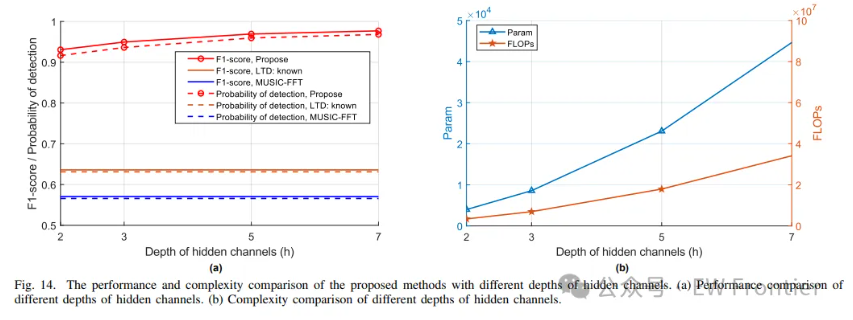
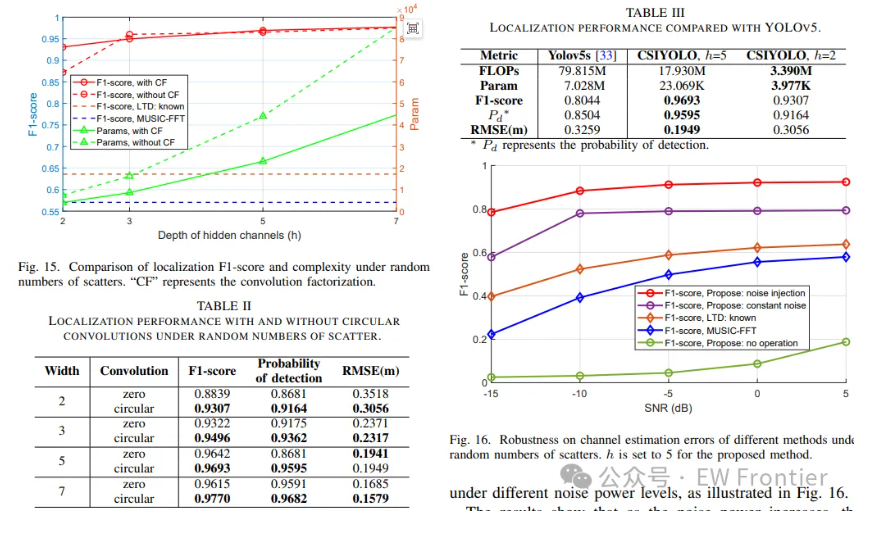
- 可扩展的隐藏通道深度 h h h : h h h 越大精度越高但计算量增加。实验中 h = 5 h=5 h=5 时F1=0.969, h = 2 h=2 h=2 时F1=0.931但参数量仅约4K------比YOLOv5小三个数量级。
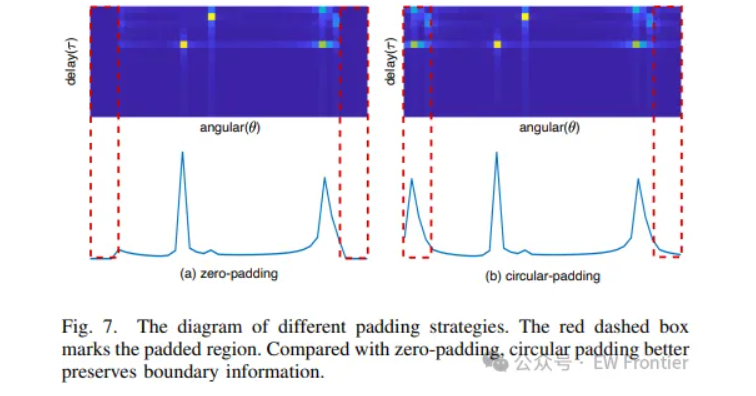
- 圆形卷积(Circular Convolution):角度维度是周期性的(0°和360°连续),传统零填充会破坏边界连续性,导致靠近边界的散射体被漏检。圆形填充(图7)保持了周期性,边界检测性能提升明显(表II)。
- 卷积分解 :将 k × k k\times k k×k 的2D卷积分解为 1 × k 1\times k 1×k 和 k × 1 k\times 1 k×1 两个1D卷积。参数量从 O ( k 2 ) O(k^2) O(k2) 降到 O ( 2 k ) O(2k) O(2k),并可在中间插入非线性激活,在降低计算量的同时甚至提升了精度(图15)。
3.7 噪声注入训练策略
真实信道估计总存在误差。为提高鲁棒性,训练时向CSI注入加性高斯白噪声,并且噪声方差随训练进程逐渐增大(从0线性增长到最大值)。这类似于课程学习:先学习干净样本,再适应越来越 noisy 的样本。
实验显示(图16),没有噪声注入时,CSIYOLO在高噪声下性能崩溃;使用该策略后,在很宽的噪声功率范围内保持稳定高精度。
---
四、实验结果与讨论
4.1 总体性能对比
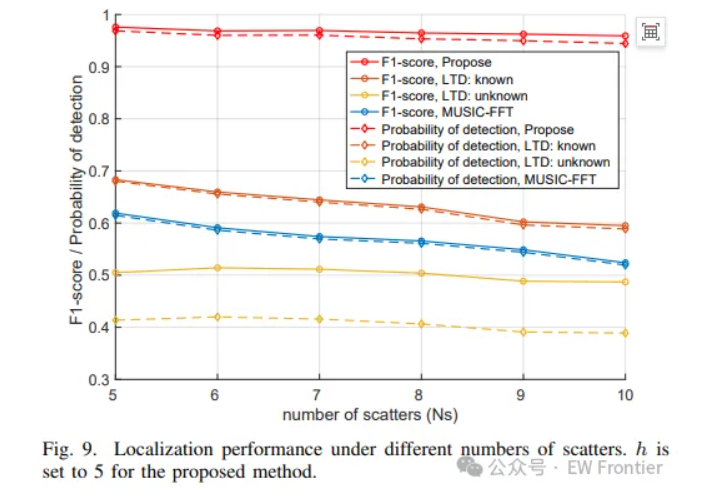
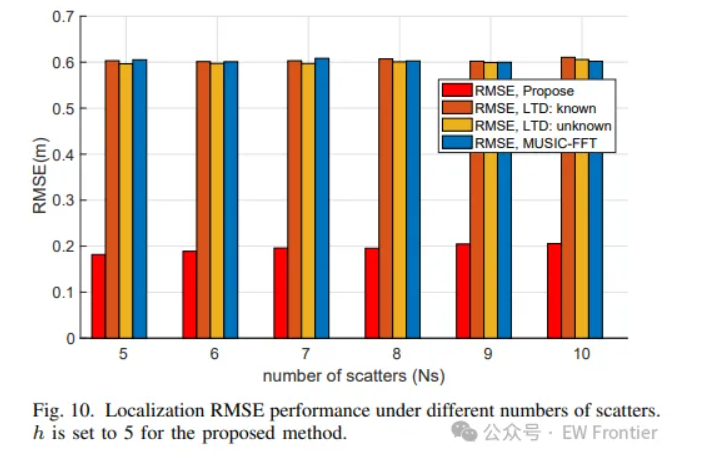
图9、10展示了与MUSIC-FFT 14 和低秩张量分解(LTD)26 的对比。注意,对比方法均假设已知真实的散射体数量(这是它们的前提条件),而CSIYOLO不知道数量。
- 检测概率(召回率):CSIYOLO约0.96,MUSIC-FFT约0.92,LTD约0.90。
- F1-score:CSIYOLO约0.97,远高于对比方法。
- 定位RMSE :CSIYOLO低至0.19 m,而MUSIC-FFT和LTD均在0.4 m以上。这得益于CSIYOLO的连续坐标回归,不受网格分辨率限制。
图11给出了一个可视化例子:LTD在角度-延迟域中检测出大量虚假峰值(图11(a)左下散布的红点),导致定位图中出现错误的散射体(图11(b)左下框)。而CSIYOLO的检测干净、定位准确。
4.2 网络设计的有效性验证
- 深度 h h h 的影响 (图14): h = 5 h=5 h=5 时精度最高, h = 2 h=2 h=2 时精度小幅下降但参数量从23K降至4K,FLOPs从17.9M降至3.39M,适合资源受限设备。
- 卷积分解(图15):采用分解后参数量减少约50%,F1-score从0.964提升到0.969(反而更好),因为分解引入的非线性增强了表达能力。
- 圆形卷积 (表II):在不同 h h h 下,圆形卷积均优于零填充,尤其在边界散射体检测上提升明显。
- 与YOLOv5对比(表III):YOLOv5s参数量7.03M,F1-score仅0.804;CSIYOLO(h=2)参数量仅0.004M,F1-score达0.931。直接套用通用目标检测网络效果很差,任务导向优化至关重要。
4.3 鲁棒性验证
图16展示了在不同噪声功率(对应信道估计误差)下的性能。不加噪声注入训练的CSIYOLO性能随噪声增加急剧下降;而采用噪声注入策略后,F1-score保持在0.95以上,远优于MUSIC-FFT和LTD。此外,渐进增噪方案比固定噪声方案效果更好。
五、结论与启发
5.1 论文总结
CSIYOLO是首次将YOLO式目标检测思想系统应用于CSI散射体感知的工作。它证明了:在无需修改现有通信波形和硬件的前提下,仅依靠单基站-单用户估计出的CSI,就能实现高精度、鲁棒、即插即用的环境散射体定位。
主要技术贡献:
- 将散射参数提取转化为锚点回归+置信度预测的目标检测问题。
- 设计了针对CSI角度-延迟域特性的轻量化网络(圆形卷积、卷积分解、多尺度锚点)。
- 提出自适应置信度阈值和空间合并策略,有效消除虚假目标。
- 引入噪声注入课程训练,增强对信道估计误差的鲁棒性。
实验结果显示,CSIYOLO在散射体数量未知、噪声干扰等实际条件下,定位精度和鲁棒性远超传统参数估计算法,且计算效率极高。
5.2 对研究者的三点启发
1. 跨域迁移的"中间表示"思维
CSIYOLO并没有直接在原始CSI上应用YOLO,而是先通过2D-DFT将CSI变换到角度-延迟域 ------这个域里,散射体呈现出类似图像中"点状物体"的分布,从而自然对接目标检测。这种找到一个适配下游任务的中间表示的思路,值得在其他物理问题中借鉴。
2. "点回归"替代"框回归"的任务简化
许多工程问题中,我们只需要检测目标的位置,而不需要其大小。经典的YOLO预测边界框(中心+宽高),但CSIYOLO只预测中心偏移量。这大幅减少了输出维度,降低了网络容量需求,使得一个仅几万参数的模型就能超越千万参数的通用的YOLO------根据任务本质裁剪输出空间,是高效模型设计的关键。
3. 物理先验引导的网络结构设计
- 圆形卷积:源自角度域的周期性物理事实。
- 多尺度锚点:源自散射体在延迟-角度域的能量扩散尺度不同(近处散射体峰值较胖,远处较瘦)。
- 卷积分解:源自对资源受限场景的预判。
这些设计不是"为了创新而创新",每一个都能追溯到明确的物理动机或工程约束。这种物理+数据驱动的融合范式,将是6G智能感知的重要方向。
5.3 未来展望
- 多用户信息融合:当前仅用单用户,未来可融合多个UE的CSI,利用多视角提升定位精度和覆盖范围。
- 三维散射体定位:当前假设二维平面,可扩展至三维(需增加俯仰角维度)。
- 在线自适应学习:环境变化时,如何利用少量新样本快速微调模型?
- 与通信任务联合优化:感知结果直接反馈给波束管理、资源分配等通信模块,形成闭环。
参考文献
1 X. Zhang et al., "CSIYOLO: An Intelligent CSI-based Scatter Sensing Framework for Integrated Sensing and Communication Systems," arXiv:2509.19335v1, 2025.
2 Z. Wei et al., "Integrated sensing and communication signals toward 5G-A and 6G: A survey," IEEE IoT J., 2023.
3 Q. Shi et al., "Device-free sensing in OFDM cellular network," IEEE J. Sel. Areas Commun., 2022.
4 B. Lu et al., "Deep-learning-based multinode ISAC 4D environmental reconstruction," IEEE IoT J., 2024.
写在最后:CSIYOLO的工作展示了计算机视觉领域成熟的目标检测框架如何"降维打击"通信感知中的传统信号处理难题。它的成功并非偶然------当我们将物理世界的信号变换到恰当的表示空间后,许多看似复杂的问题会变得与CV中的经典问题同构。这种跨领域的洞察力,或许比算法本身更值得学习。