前言
在日常开发与团队协作场景中,借助OpenClaw工具与钉钉企业内部机器人对接,可实现业务信息和任务状态的实时同步,大幅提升工作效率。本文将系统介绍OpenClaw与钉钉机器人的对接流程,提供清晰实用的操作指南,帮助开发者高效完成系统集成。
一、核心接入思路
本次对接基于钉钉开放平台的渠道扩展(Channels)功能实现,主要流程包括:
- 在钉钉开发者后台创建企业内部应用并配置机器人功能
- 完成钉钉与现有OpenClaw网关的集成
在技术方案选择上,我们采用Stream模式作为机器人消息接收方式。该模式具有以下优势:
- 通过WebSocket长连接实现实时通信
- 无需公网域名即可运行
- 显著降低内网部署的技术门槛
尚未搭建 OpenClaw 网关的开发者,可直接下载 Windows 一键部署包 : https://xiake.yun/api/download/package/14?promoCode=IVD643FDE29A
推荐使用浏览器内置下载功能或迅雷等下载工具,以防下载中断。下载完成后,请检查桌面或下载文件夹中是否存在名为Openclaw-Windows-2.6.6.zip的压缩包,并确保文件完整无损后再进行解压安装。
二、前置准备
开始接入操作前,需完成以下准备工作,保障流程顺畅推进:
- 拥有钉钉企业账号,且账号具备开发者 / 管理员权限,可正常进入钉钉开发者后台
- 已完成 OpenClaw 网关的搭建与运行
- 准备机器人图标素材:JPG/PNG 格式、240*240px 以上、1:1 比例、2MB 以内且无圆角
- 准备机器人消息预览图:png/jpeg/jpg 格式,文件大小不超过 2M
三、具体操作步骤
步骤 1:登录钉钉开发者后台,创建企业内部应用
打开钉钉开发者后台官网:https://open-dev.dingtalk.com,使用具备权限的钉钉企业账号完成登录;进入后台后,找到应用开发模块,选择创建企业内部应用,进入应用创建初始化页面,按提示完成应用的初始创建。

步骤 2:为应用添加「机器人」能力模块
完成应用创建后,您将进入该应用的专属功能面板。在应用能力区域找到"机器人"选项,点击"+"号进行添加,即可为当前企业内部应用开通机器人功能。此步骤是 OpenClaw 与钉钉对接的关键前提,必须完成才能进行后续的机器人配置操作。
步骤 3:配置机器人基础信息,发布应用新版本
- 机器人能力添加完成后,进入机器人配置页面,按要求填写机器人名称、简介、描述等信息,上传图标和消息预览图,消息接收模式默认选择 Stream 模式(无需公网域名)。
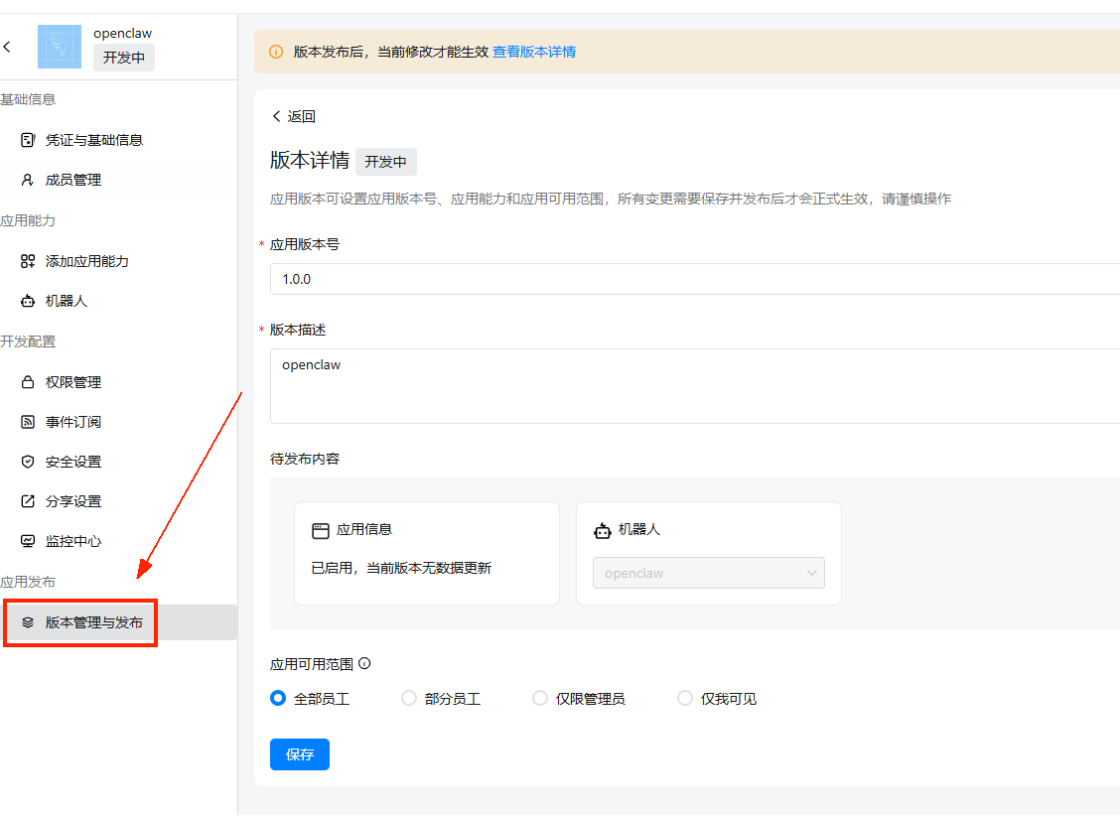
- 机器人信息配置完成后,进入应用的版本管理与发布页面,填写版本号、版本描述,选择应用可用范围,确认信息后点击保存并完成版本发布,版本发布后配置修改才会正式生效。

步骤 4:获取应用核心凭证信息(对接关键)
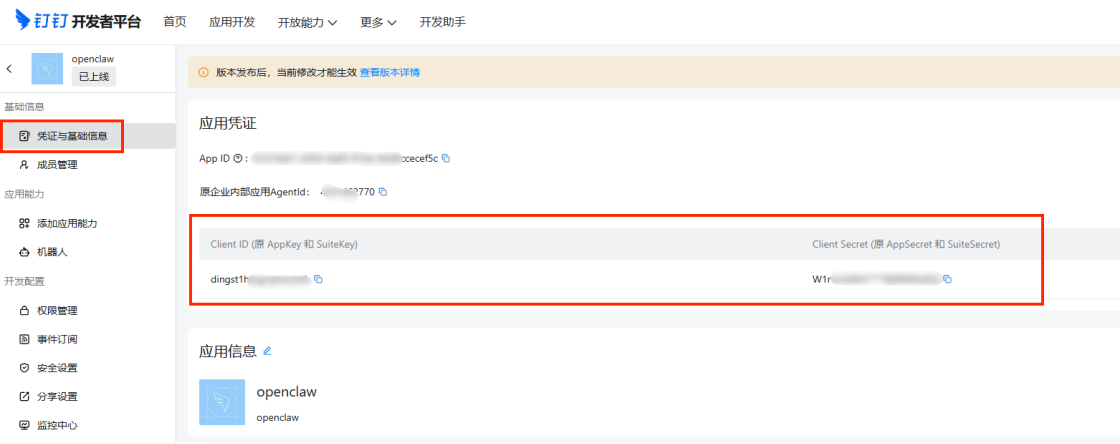
应用版本发布上线后,进入应用的凭证与基础信息页面,准确记录以下两个核心参数,后续用于 OpenClaw 网关与钉钉的对接配置,切勿泄露:
1.Client ID(原 AppKey):格式示例:dingxxxxxxxxxx
2.Client Secret(原 AppSecret):一长串随机字符
重要提示:该凭证信息为应用核心密钥,请勿泄露给无关人员,避免应用被非法调用。
四、后续对接操作
完成 Client ID 和 Client Secret 的获取后,请将这两个参数准确填入 OpenClaw 网关的对应配置项。完成配置后,即可实现 OpenClaw 与钉钉机器人的对接,从而在钉钉聊天场景中调用 OpenClaw 的各项功能。
五、实操注意事项
- 钉钉开发者后台中,所有应用配置的修改,必须发布新版本后才能生效,未发布的配置仅处于开发中状态,无法实际使用
- 机器人图标和消息预览图需严格遵循格式、大小、比例要求,否则会出现上传失败的情况,建议提前检查素材规格
- Stream 模式为本次配置的核心,无需公网域名,适合内网部署的 OpenClaw 网关;若需切换其他消息接收模式,需额外配置公网可访问的域名并完成相应备案
- 应用可用范围可根据企业权限管理需求灵活选择,测试阶段建议选择「仅我可见」,避免配置不当影响企业其他员工的正常使用
- 记录 Client ID 和 Client Secret 时请准确复制,避免因字符缺失、错误或多复制空格,导致后续网关对接失败
总结
以下是优化后的内容:
OpenClaw与钉钉企业内部机器人的接入流程包含五个核心步骤:
- 创建企业内部应用
- 添加机器人能力
- 配置机器人信息
- 发布应用版本
- 获取对接凭证
钉钉开发者后台的应用配置至关重要,尤其是Stream模式的选择和版本发布操作,这两项设置将直接决定后续对接效果。配置完成后,只需将获取的核心凭证正确填入OpenClaw网关,就能在钉钉平台顺利调用OpenClaw的各项功能。
OpenClaw 一键部署包:https://xiake.yun/api/download/package/14?promoCode=IVD643FDE29A