一、数据格式
1.1 标准格式,JSON/XML
- 常用标识 :
Self-Describing Data/IT-OT Bridge - 实现原理 :通过特定的字符结构(如 JSON 的键值对
{}或 XML 的标签对<>)对数据进行语义化封装。它是基于文本的编码,不依赖于特定的机器架构,具有极佳的跨平台性。 - 技术概述:JSON 结构紧凑、解析速度快,是目前 IIoT 领域(如 MQTT)的首选 payload 格式;XML 功能全面但冗余度高,常用于传统的 OPC UA 信息建模或复杂的系统配置。
- 使用场景:视觉检测结果(如坐标、置信度、物料名称)异步上传至云端或 MES 系统;在 RESTful 交互中作为主要的响应格式 。
1.2 常用格式,字节/自定义分隔符
- 常用标识 :
Native Mode/Delimiter-Separated Values - 实现原理 :将数据直接转换为二进制字节流或 ASCII 字符串,并在数据段之间插入预设的特殊字符(如逗号
,、分号;或回车换行CR+LF)作为截断标志 。
xml
<起始文本><字段一><分隔符><字段二><分隔符><字段三> <结束文本><结束符号>- 技术概述:这是最底层的通讯方式,几乎不产生协议开销。由于缺乏自描述能力,接收端必须拥有严格的"数据字典"才能正确解析。
- 使用场景 :在 Socket 通讯或串口通讯中,用于毫秒级的高速数据推送,例如相机直接向 PLC 的寄存器写入
"120.5,30.2,OK"。
二、通用协议
2.1 TCP/UDP
- 常用标识 :
Layer 4 Transport/Socket - 实现原理:TCP 通过三次握手建立连接,并利用确认号和序列号确保数据按序、无误地到达;UDP 则不建立连接,直接封装报文发送,追求极致的传输速度 。
- 技术概述:TCP 提供可靠的字节流服务,适合传输关键检测指令;UDP 虽然可能丢包,但在视频流传输(如预览画面)中具有更低的延迟。
- 使用场景:相机与上位机算法库之间的图像获取指令(TCP);高频实时心跳包(UDP)。
2.2 串口
2.2.1 RS-232/422/485
- 常用标识 :
COM Port/Modbus RTU Physical - 实现原理:基于物理电平变化的串行通讯。RS-232 采用单端信号,传输距离短;RS-485 采用差分信号,支持多节点轮询且抗干扰能力强。
- 技术概述:虽然带宽受限(通常波特率最高为 115200),但其协议栈极薄,硬件成本极低且极其稳定。
- 使用场景:对接旧款扫码枪、连接实验室电子秤、控制低端步进驱动器或向 LED 显示屏实时更新检测数值 。
2.3 IO
-
常用标识 :
Discrete I/O/Digital Trigger -
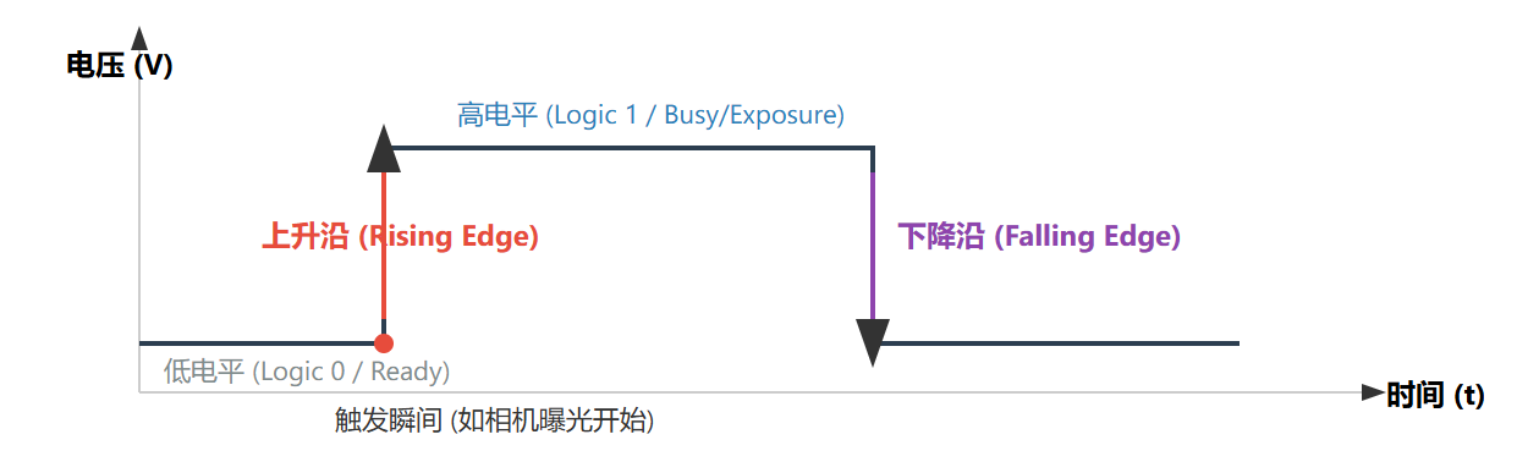
实现原理 :通过 24V 物理电平的跳变(上升沿/下降沿)触发内部中断。响应时间通常在微秒级别 。
-
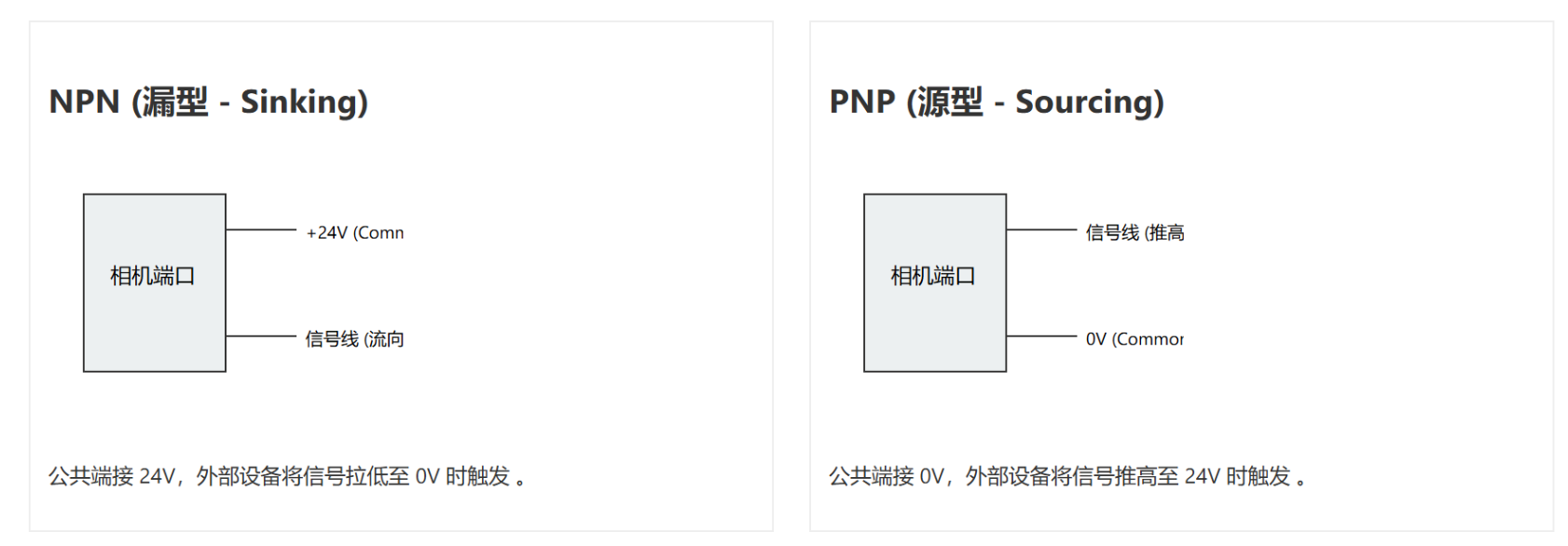
技术概述:分为 NPN(漏型)和 PNP(源型)接法,是视觉系统与外界进行同步(Synchronization)最可靠的手段 。
- 物理电平 vs 业务逻辑:
- NPN 传感器:通常为低电平有效。
- PNP 传感器:通常为高电平有效。
- 物理电平 vs 业务逻辑:
- 使用场景:产线光电开关触发相机拍摄;相机向剔除机构发送 NG 剔除信号;驱动同步光源频闪 。
2.3.1 GPIO(General-Purpose Input/Output,通用型输入输出)
- GPIO(General-Purpose Input/Output,通用型输入输出)是嵌入式系统中连接 SoC(系统级芯片)与外部硬件最基础、最灵活的接口。
1. 设备节点映射
每一个 GPIO 控制器(GPIO Bank)对应一个字符设备文件。
- 例如:
/dev/gpiochip5代表第 5 组 GPIO 控制器。 - 偏移量 (Offset) :组内的具体引脚编号。例如 GPIO45 可能对应
gpiochip5的偏移量 5 。
2. 请求控制权 (gpiohandle_request)
在操作 IO 之前,必须向内核申请控制权。这是通过 GPIO_GET_LINEHANDLE_IOCTL 命令实现的 。
- Flags :指定方向(
GPIOHANDLE_REQUEST_OUTPUT或INPUT) 。 - Consumer Label :为该句柄起一个标签,方便在
/sys/kernel/debug/gpio中调试查看 。
3. 信号触发模式 (Events)
对于输入端口,Linux 允许配置不同的硬件触发事件:
- 上升沿 (Rising Edge):电压由低变高。
- 下降沿 (Falling Edge):电压由高变低。
- 电平触发 (High/Low Level):保持特定电压即触发。
Global_PIN=(Bank_Number×Pins_Per_Bank)+Offset Global\_PIN = (Bank\_Number \times Pins\_Per\_Bank) + OffsetGlobal_PIN=(Bank_Number×Pins_Per_Bank)+Offset
若 GPIO45 的 Offset 为 5,则:$45 = (Bank \times Pins\_Per\_Bank) + 5$,得出该组的起始基址(Base)为 40。这意味着该架构中,每个 Bank(组)管理 40 个引脚(这在某些特定的工业芯片组中常见,如特定的 FPGA IP 核或非标准的 SoC 封装)。
Linux 编程实战详述
根据你提供的 gpio_output.c和 opt\_event\_test.c ,GPIO 编程的标准流程如下:
A. 输出配置与控制
使用 ioctl 操作输出 IO 时,内核会返回一个新的文件描述符,专门用于控制该引脚。
- 申请句柄 :填充
struct gpiohandle_request结构体,指定引脚偏移量和默认电平。 - 设置电平 :使用
GPIOHANDLE_SET_LINE_VALUES_IOCTL配合struct gpiohandle_data结构体,将物理值写入寄存器。 - 性能注意 :通过
usleep(500000)实现 500ms 的翻转间隔,可以模拟信号脉冲。
B. 输入事件检测
对于光耦输入等设备,通常采用阻塞读取模式:
- 配置模式 :通过自定义
ioctl(如OPT_SET_TRIGGER)配置触发逻辑。 - 阻塞读取 :调用
read(fd, &status, sizeof(int))。 - 唤醒机制 :当外部信号(如方波脉冲)满足触发条件时,内核驱动会唤醒处于阻塞态的
read函数,返回当前状态值并累加事件计数。
2.4 FTP/SFTP
- 常用标识 :
Image Storage Client - 实现原理:基于 TCP 的应用层协议,专门用于文件上传与下载。SFTP 在 SSH 协议之上提供了加密通道,保证了图像数据的隐私性。
- 技术概述:视觉相机通常扮演 FTP 客户端角色,在检测完成后将生成的图片或日志文件推送到远端服务器。
- 使用场景:实现"一拍一存",用于质量缺陷追溯(Traceability)及深度学习样本的自动采集。
2.5 共享文件
- 常用标识 :
SMB (Windows)/NFS (Linux) - 实现原理:允许相机通过网络挂载(Mount)服务器硬盘,将其视为本地存储路径。SMB 支持复杂的权限验证,NFS 则以轻量化和高性能著称 。
- 技术概述:它消除了文件传输的中间步骤,应用程序可以直接在共享目录下读取或修改 Job 文件 。
- 使用场景:多台智能相机共用同一个配方(Job)库;通过工控机集中读取多台相机的运行结果日志 。
2.6 GigE Vision/USB3 Vision
- 常用标识 :
Machine Vision Standard/GenICam - 实现原理:基于以太网(UDP)或 USB 3.0 物理层,配合 GenICam 标准定义的 XML 描述文件,实现对相机寄存器的标准化读写控制 。
- 技术概述 :GigE 支持
$100m$长距离传输且可组网;USB3 则具备高达$350MB/s$以上的净带宽,且支持单线供电 。 - 使用场景:海康、巴斯勒等工业相机接入 Halcon、VisionPro 或 OpenCV 等第三方算法平台进行二次开发。
三、工业标准协议
3.1 CIP
- 常用标识 :
Common Industrial Protocol/Object-Oriented - 实现原理:采用面向对象的数据模型,将设备功能抽象为类(Class)、实例(Instance)和属性(Attribute)。它定义了如何描述一个设备以及如何通过显式/隐式报文访问数据 。
- 技术概述:CIP 是 EtherNet/IP 的灵魂,其最大的优势在于媒介无关性,可在不同的网络层上提供一致的应用层语义 。
- 使用场景:定义视觉相机在 Rockwell 自动化环境中的"数字孪生"模型,实现跨协议栈的对象复用 。
3.2 Modbus
- 常用标识 :
Modbus TCP/Register Map - 实现原理:一种简单的"地址偏移量"映射协议。数据存储在离散量、线圈、输入寄存器和保持寄存器四类区域中。上位机通过功能码(如 03H 读寄存器)直接访问特定地址 。
- 技术概述:极其精简,几乎所有 PLC、仪表、触摸屏都支持。虽然没有复杂的元数据描述,但其通用性无人能及。
- 使用场景:在中小型设备中,PLC 轮询相机的寄存器以获取检测坐标或 OK/NG 计数 。
- Modbus TCP 请求报文
| 事务标识符 | 协议标识符 | 长度 | 单元标识符 | 功能码 (FC) | 数据起始地址 | 数据/数量 |
|---|---|---|---|---|---|---|
| 2 字节 | 00 00 (固定) | 2 字节 | 1 字节(从站ID) | 03 (读保持寄存器) | 00 64 (地址 100) | 00 0A (读10个字) |
- Modbus RTU 报文结构
| 从站地址 | 功能码 | 数据起始地址 | 数据数量 | CRC 校验 |
|---|---|---|---|---|
| 1 字节 | 1 字节 | 2 字节 | 2 字节 | 2 字节 |
- Modbus TCP 响应报文
| 事务标识符 | 协议标识符 | 长度 | 单元标识符 | 功能码 | 字节计数 | 寄存器数据 |
|---|---|---|---|---|---|---|
| 2 字节 | 00 00 | 2 字节 | 1 字节 | 03 | 1 字节 | N*2 字节 |
3.3 MQTT
- 常用标识 :
Pub/Sub/Sparkplug B - 实现原理:基于 Broker(代理)的中转模式。视觉端作为 Publisher 发布数据到 Topic,MES 等作为 Subscriber 订阅。Sparkplug B 规范进一步为其增加了工业命名空间和 Protobuf 二进制压缩能力 。
- 技术概述:由于是异步解耦的,特别适合在不稳定网络或低带宽环境下传输海量非实时数据 。
- 使用场景:视觉检测设备作为物联网节点,将实时的产能数据、良率分布上报至云端看板或企业数据库 。
3.4 OPCUA
-
常用标识 :
Unified Architecture/Companion Spec OPC 40100 -
实现原理:不仅是传输,更是一套语义架构。它将相机建模为一个包含各种节点(Node)的复杂树状结构,并支持基于 X.509 证书的最高级别安全认证 。
-
技术概述:通过"机器视觉配套规范 (OPC 40100)",不同品牌的视觉系统可以暴露出完全一致的状态机(State Machine)控制接口 。
-
使用场景:在高度数字化的工厂中,实现不同厂商视觉设备与上位 SCADA 系统的即插即用集成 。
3.5 PROFINET
- 常用标识 :
PNIO/GSDML/Siemens Standard - 实现原理:西门子主导的实时以太网。通过 GSDML 描述文件在 PLC 中进行硬件组态,并在以太网帧中通过 EtherType 0x8892 直接跳过 TCP/IP 协议栈,实现毫秒级的实时 IO 交换 。
- 技术概述:符合 Class B 实时标准,支持流量控制(Traffic Control),确保在大流量下控制指令不丢失。
- 使用场景:西门子 S7-1200/1500 系统集成智能相机的首选,用于高速节拍下的触发控制与结果反馈 。
3.6 EtherNet/IP - 通用工业协议(CIP)
- 常用标识 :
EIP/Implicit Messaging (UDP) - 实现原理:将 CIP 封装在 TCP/UDP 之上。控制指令通过 UDP 隐式消息以固定的 RPI(请求包间隔)进行周期性刷新,确保了控制的确定性 。
- 技术概述:支持 User Data Bypass 功能,允许 PLC 数据直接绕过繁琐的转换层直达相机的逻辑处理单元。
- 使用场景:Rockwell (A-B) 或欧姆龙控制系统下,相机与 PLC 之间的高频位置补偿与状态交互 。
3.7 EtherCAT
- 常用标识 :
Ethernet for Control Automation Technology - 实现原理:采用"从站在线处理"技术。主站发送的数据帧在经过从站时,从站会实时读取属于自己的数据并插入反馈数据,整个过程无需等待帧完全接收,同步精度达纳秒级 。
- 技术概述 :它是目前工业视觉中同步精度最高的总线协议,通过 XFC 技术可将 IO 响应压缩至
$100\mu s$以内 。 - 使用场景:在多轴联动的机械手引导(VGR)应用中,实现视觉定位坐标与伺服轨迹的实时合步 。
3.8 CC-Link IE 与 TSN
- 常用标识 :
CLPA/802.1AS Sync - 实现原理:基于以太网的超宽带网络。TSN(时间敏感网络)版本通过 IEEE 标准的时间分割技术,在同一物理网线上为控制流分配独占的时隙(Slots) 。
- 技术概述 :支持
$1Gbps$或更高的带宽,并允许 PLC 实时控制数据与非实时的图像数据流混合传输而不产生干扰 。 - 使用场景:三菱电机生态系统。用于半导体、电池行业的高产出视觉检测线,减少布线并提升系统灵活性 。
3.9 IO-Link
- 常用标识 :
The Last Meter/IEC 61131-9 - 实现原理:点对点的串行通讯,将底层的开关量信号数字化。主站与设备之间通过 3 线制电缆双向传输过程数据、参数及诊断信息 。
- 技术概述:它为视觉系统的辅助器件(如光源)提供了"大脑",允许从 PLC 端远程修改光源亮度和触发脉宽 。
- 使用场景:集成智能光源控制器或激光测距传感器,实现设备的预测性维护(Predictive Maintenance) 。
3.10 RESTful API
- 常用标识 :
HTTP Interface/Web Service - 实现原理:基于标准的 HTTP 请求(GET, POST, PUT, DELETE)。它是无状态的,通过 URL 定位资源,并通常返回 JSON 或图片对象 。
- 技术概述:具有极高的通用性和灵活性,无需专门的驱动程序,直接通过浏览器或简单的脚本即可调用相机功能 。
- 使用场景:在智能工厂的 Web 终端上实时请求相机当前图像,或者通过手机 APP 远程修改视觉检测的阈值参数。
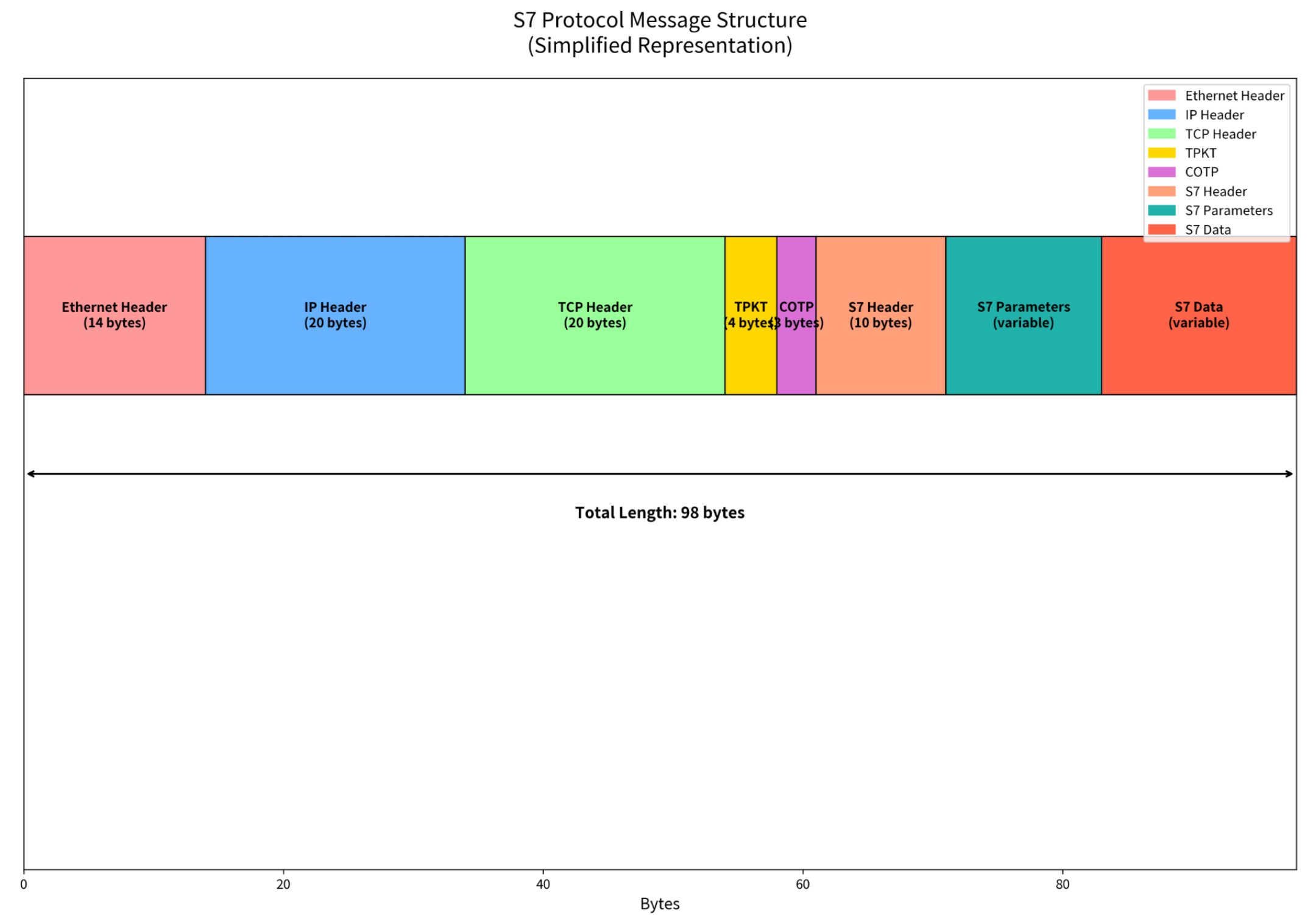
S7协议
- 定义 西门子 S7 协议依赖于 ISO-on-TCP(RFC 1006)规范。底层通过 TPKT 与 COTP 层封装,将原本面向无边界数据流的 TCP 协议,强行转化为面向结构化离散消息的通信介质,从而适应工业自动化场景对指令边界的严苛要求 。