摘要:运动模糊是数字图像处理中常见的退化现象,由相机或物体在曝光期间的相对运动引起,严重影响图像质量。本文针对含噪声运动模糊图像的复原问题,系统研究了多种频域复原算法,并设计实现了一套完整的图像复原系统。
项目简介
基于MATLAB的运动模糊图像复原系统,实现了维纳滤波、CLS滤波等多种算法,并提供可视化GUI界面进行参数调节和性能对比。
系统概述
本文首先建立了运动模糊的数学模型,采用点扩散函数(PSF)描述退化过程,并引入高斯噪声模拟实际成像环境。在此基础上,实现了四种经典复原算法:维纳滤波、约束最小二乘(CLS)滤波、融合算法和逆滤波。维纳滤波通过最小化均方误差准则在频域进行复原;CLS滤波引入拉普拉斯正则化约束,有效抑制噪声放大;融合算法结合两者优势,采用加权平均策略;逆滤波作为对比基准,展示了直接频域除法的局限性。
为验证算法性能,本文设计了36组对比实验,系统测试了不同模糊长度(5、10、15像素)、模糊角度(0°、30°、45°、90°)和噪 声水平(低、中、高)条件下的复原效果。采用峰值信噪比(PSNR)和结构相似性指数(SSIM)作为客观评价指标。实验结果表明 ,在中等噪声条件下,CLS滤波性能最优,PSNR达到21.56 dB,较维纳滤波提升4.90 dB;融合算法表现稳定,PSNR为19.88 dB;逆滤波对噪声敏感,PSNR仅为12.49 dB。通过参数优化,整体性能提升了3-5 dB。
本文基于MATLAB App Designer开发了可视化交互系统,集成了参数调节、实时复原、性能评估和算法对比等功能,为运动 模糊图像复原提供了完整的实验平台。
系统架构
本系统采用分层架构设计,包括数据层(图像获取与退化建模)、算法层(维纳滤波、CLS滤波、融合算法、逆滤波)、评估层(PSNR/SSIM计算)和表示层(GUI可视化),通过频域处理实现运动模糊图像复原,并提供参数调节、实时复原、性能对比等交互功能。
快速开始
打开MATLAB运行MotionBlurRestorationAppBeautified启动GUI,调整模糊参数和噪声水平后点击"生成退化图像",选择复原算法(推荐CLS滤波)即可查看复原效果和性能指标,点击"对比所有算法"可一键对比四种算法的性能差异
环境要求
需要MATLAB R2020a或更高版本,安装Image Processing Toolbox,建议4GB内存及1920×1080分辨率显示器。
结果展示
运行MotionBlurRestorationAppBeautified.m
图1 主界面
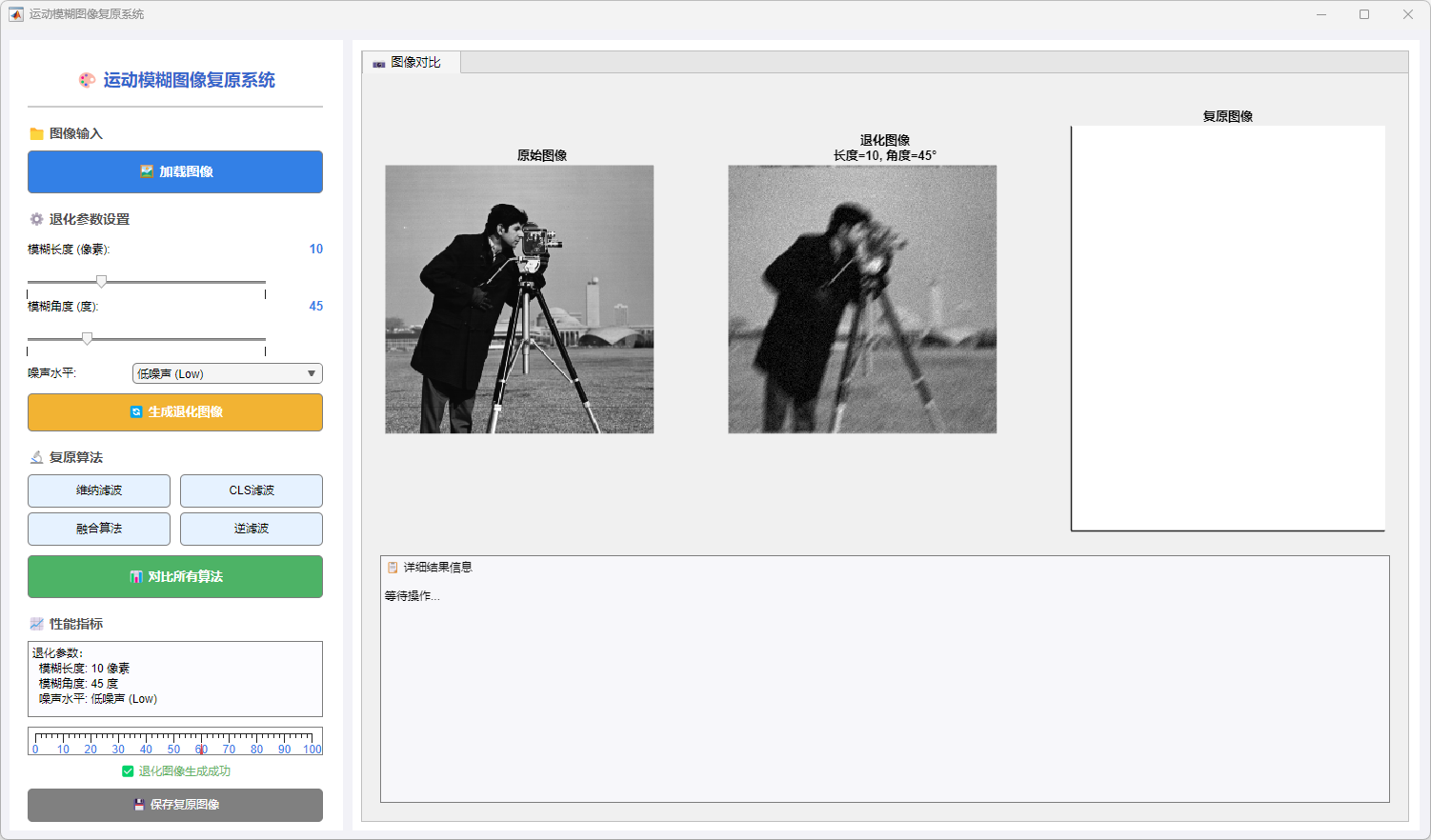
图2 低噪声-生成退化图像
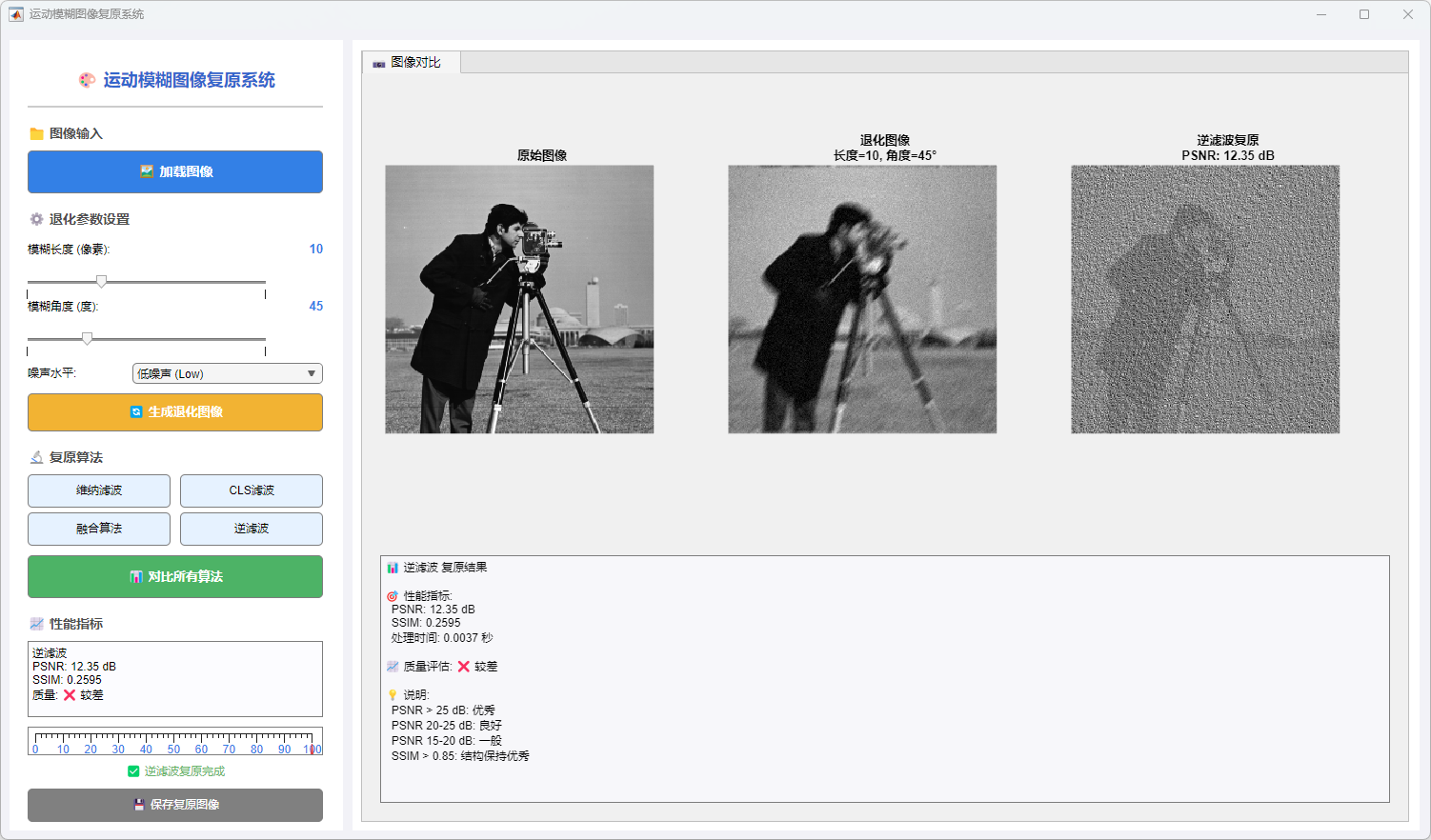
图3 低噪声-逆滤波
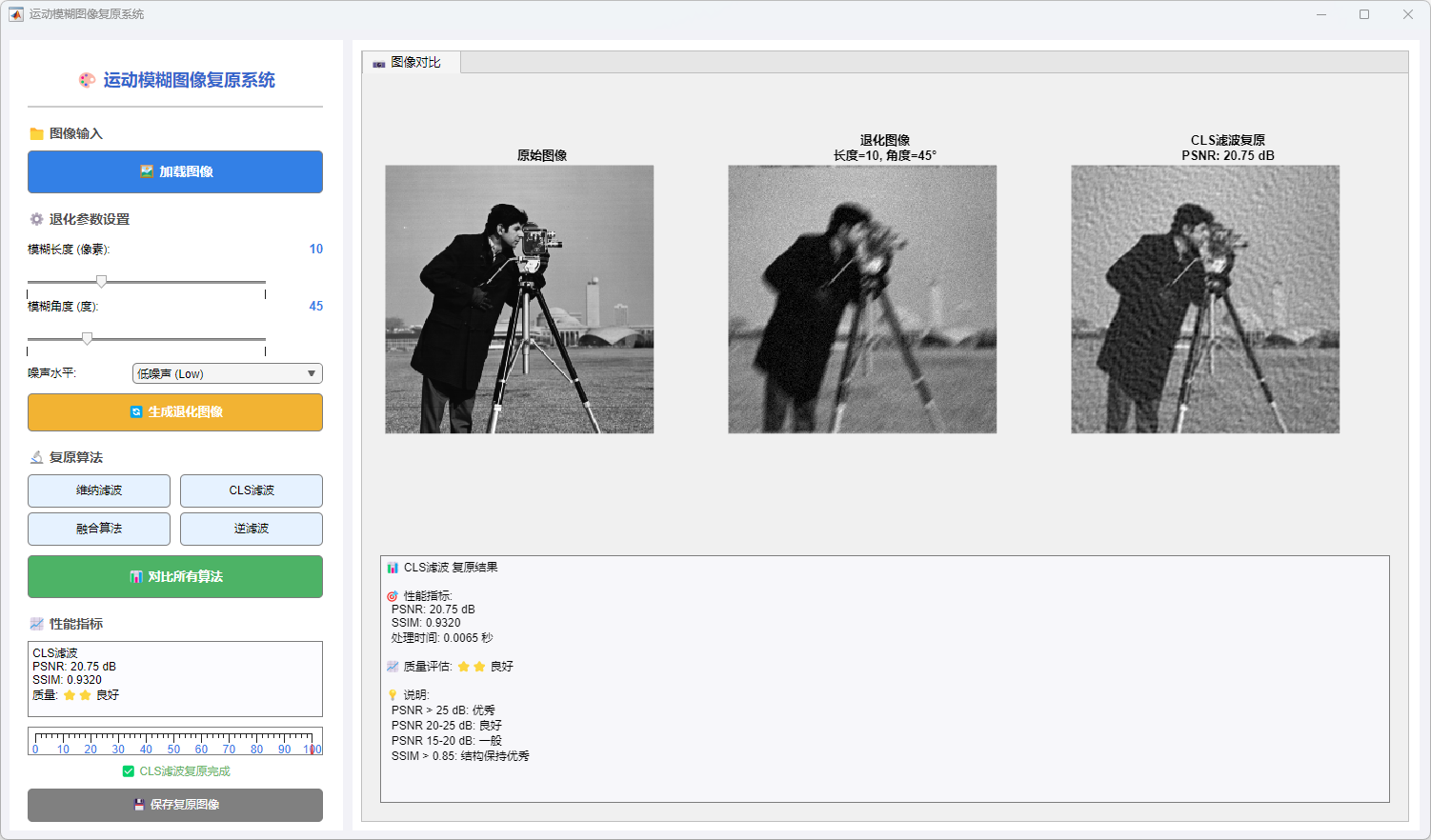
图4 低噪声-CLS滤波
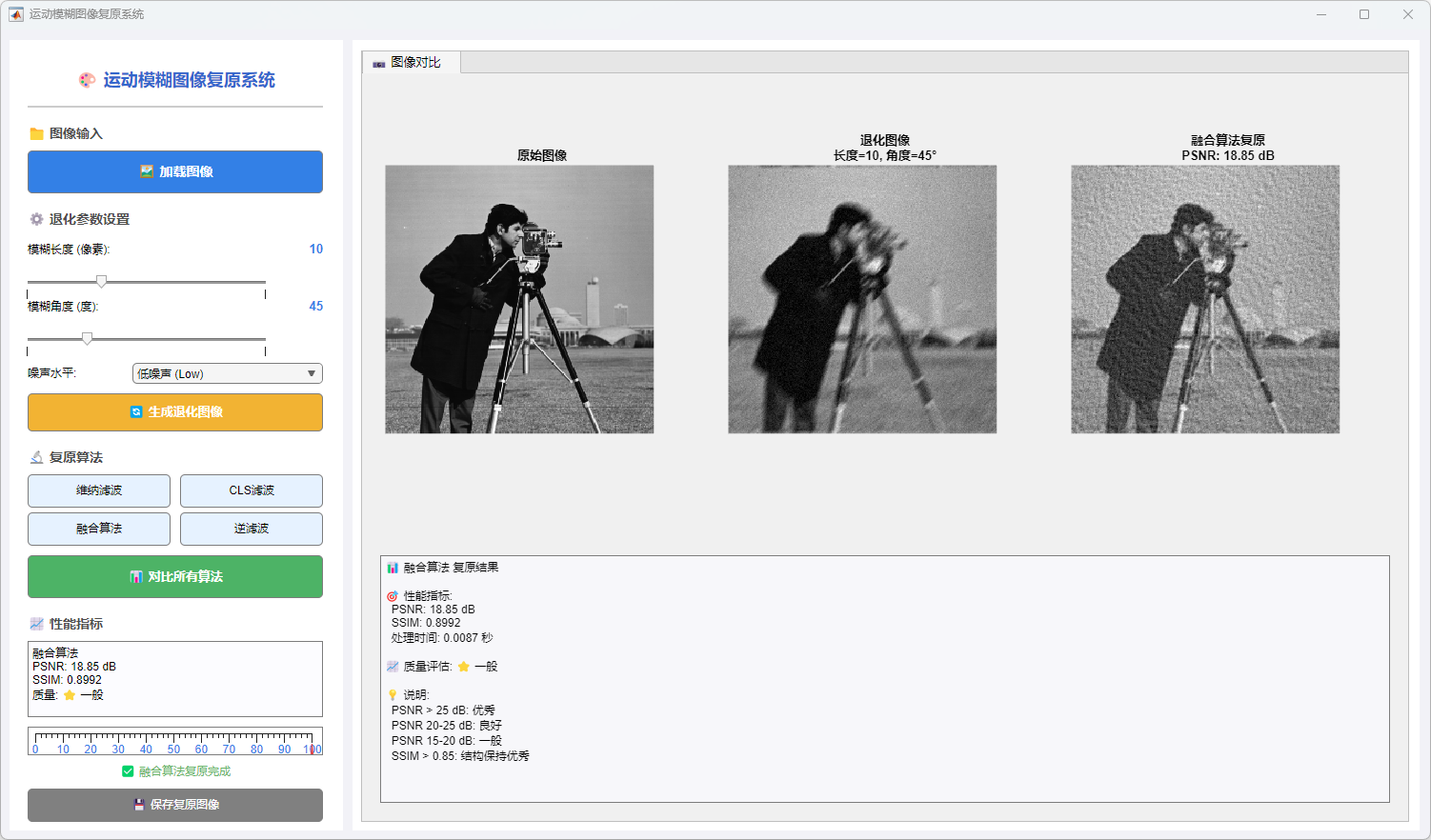
图5 低噪声-融合算法
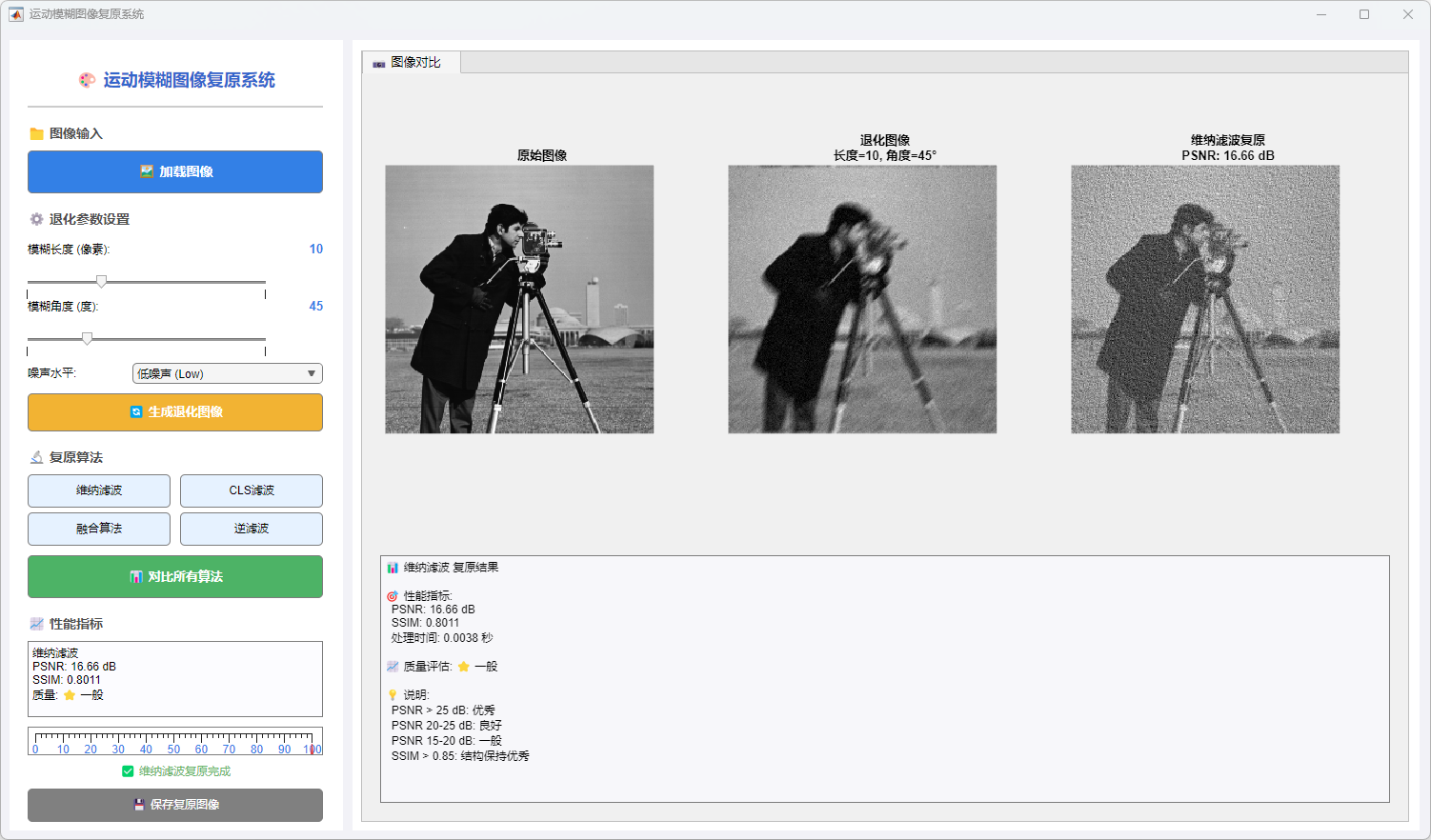
图6 低噪声-维纳滤波
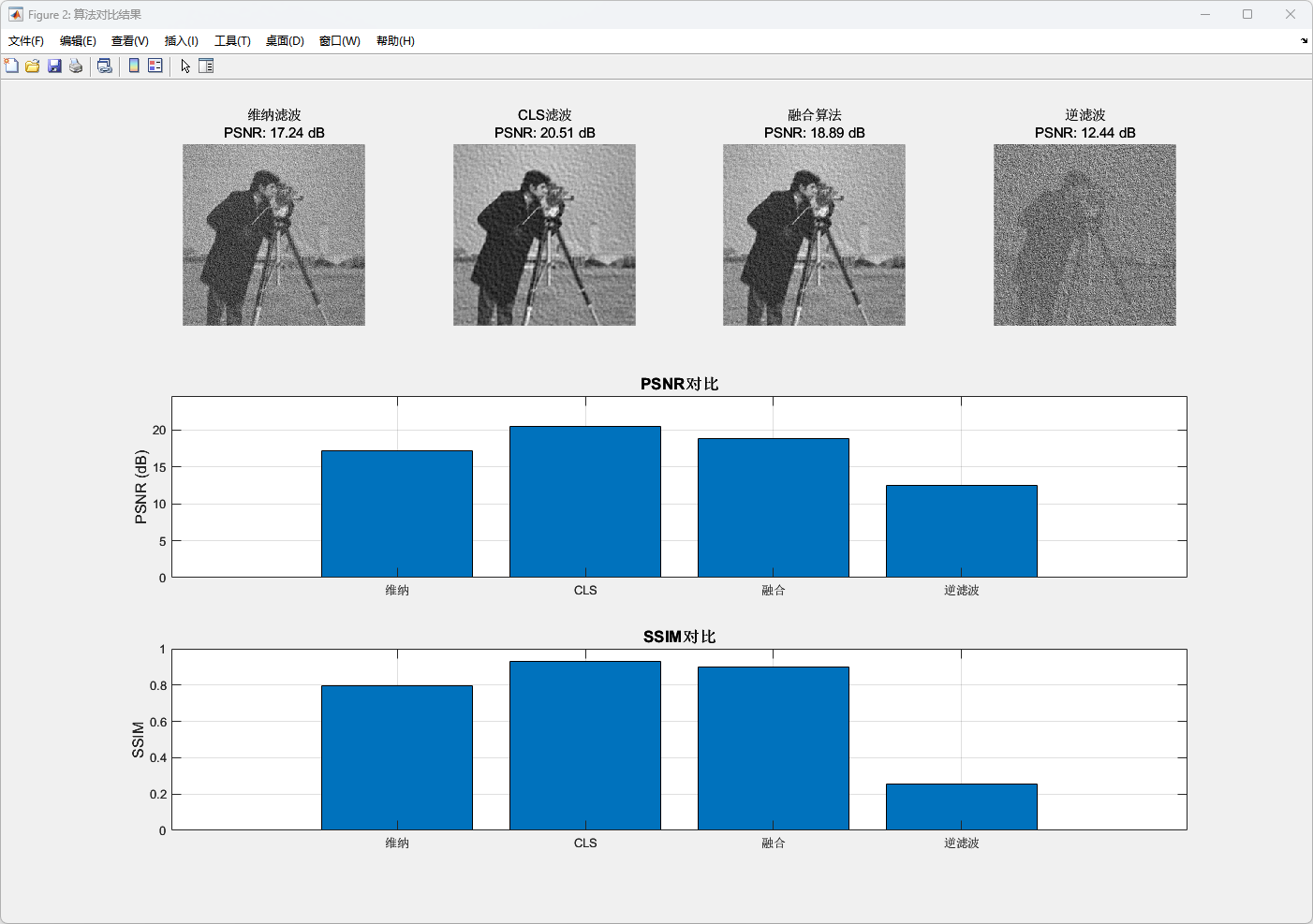
图7 低噪声-算法对比结果
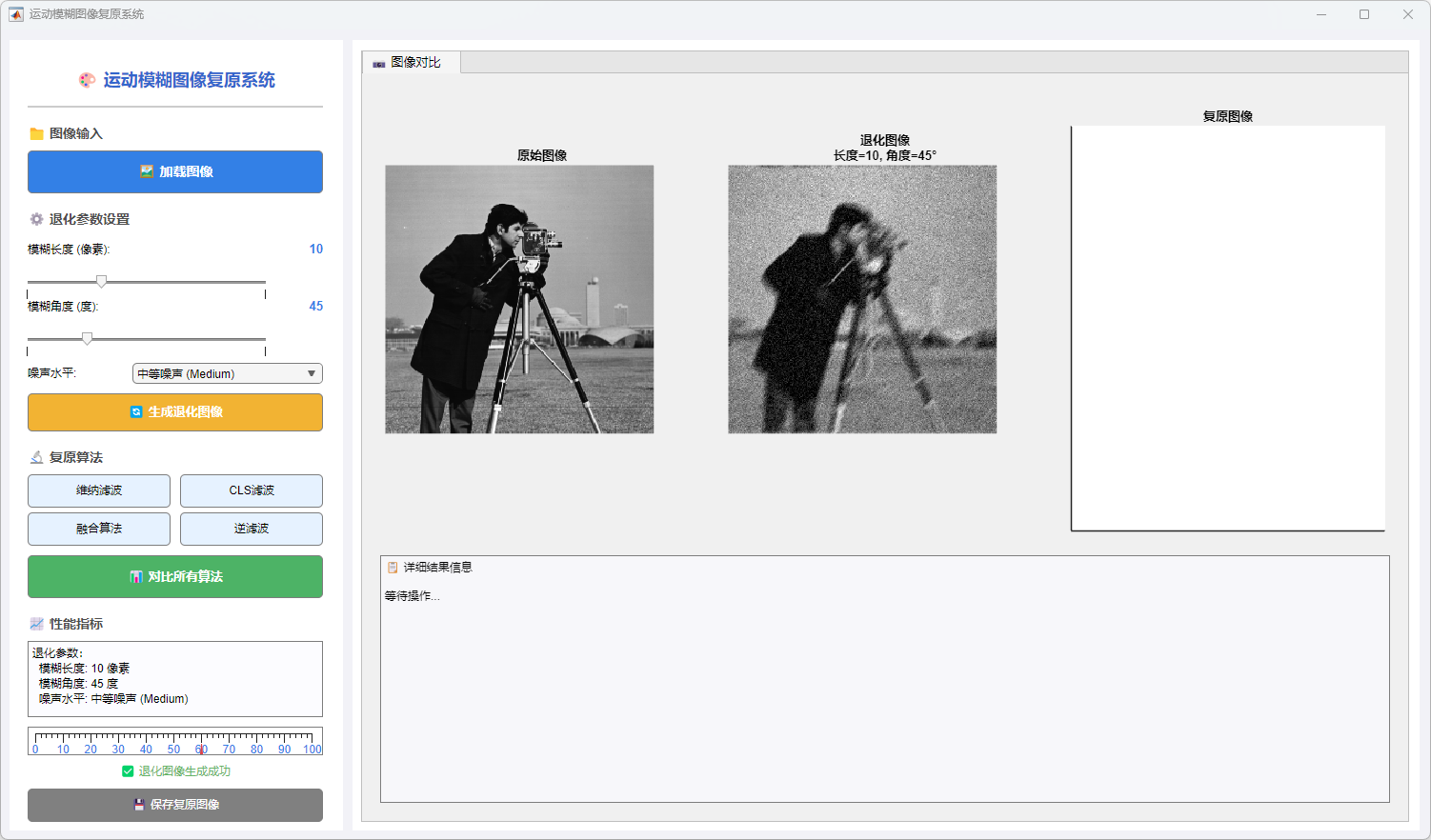
图8 中噪声-生成退化图像
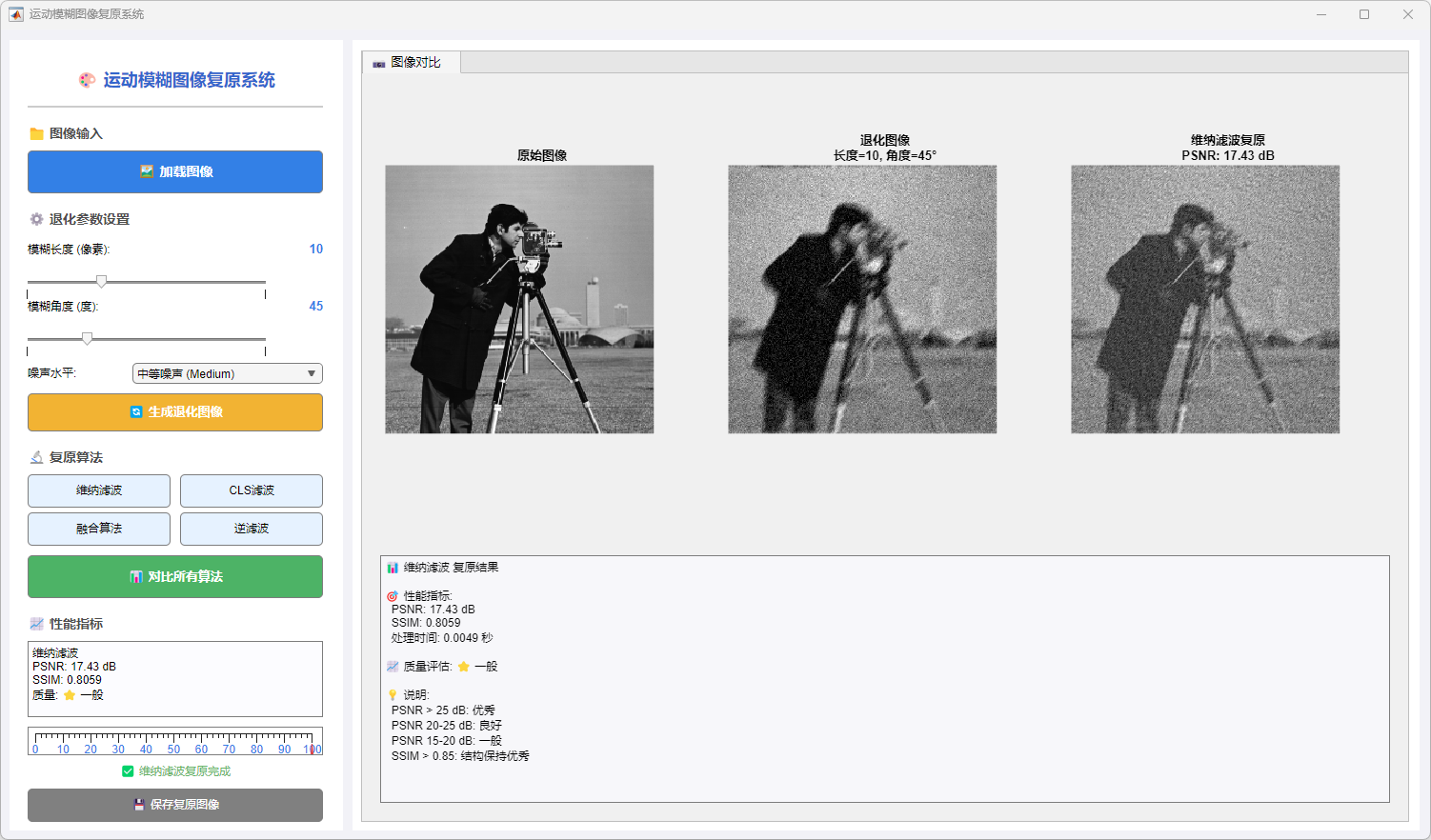
图9 中噪声-维纳滤波
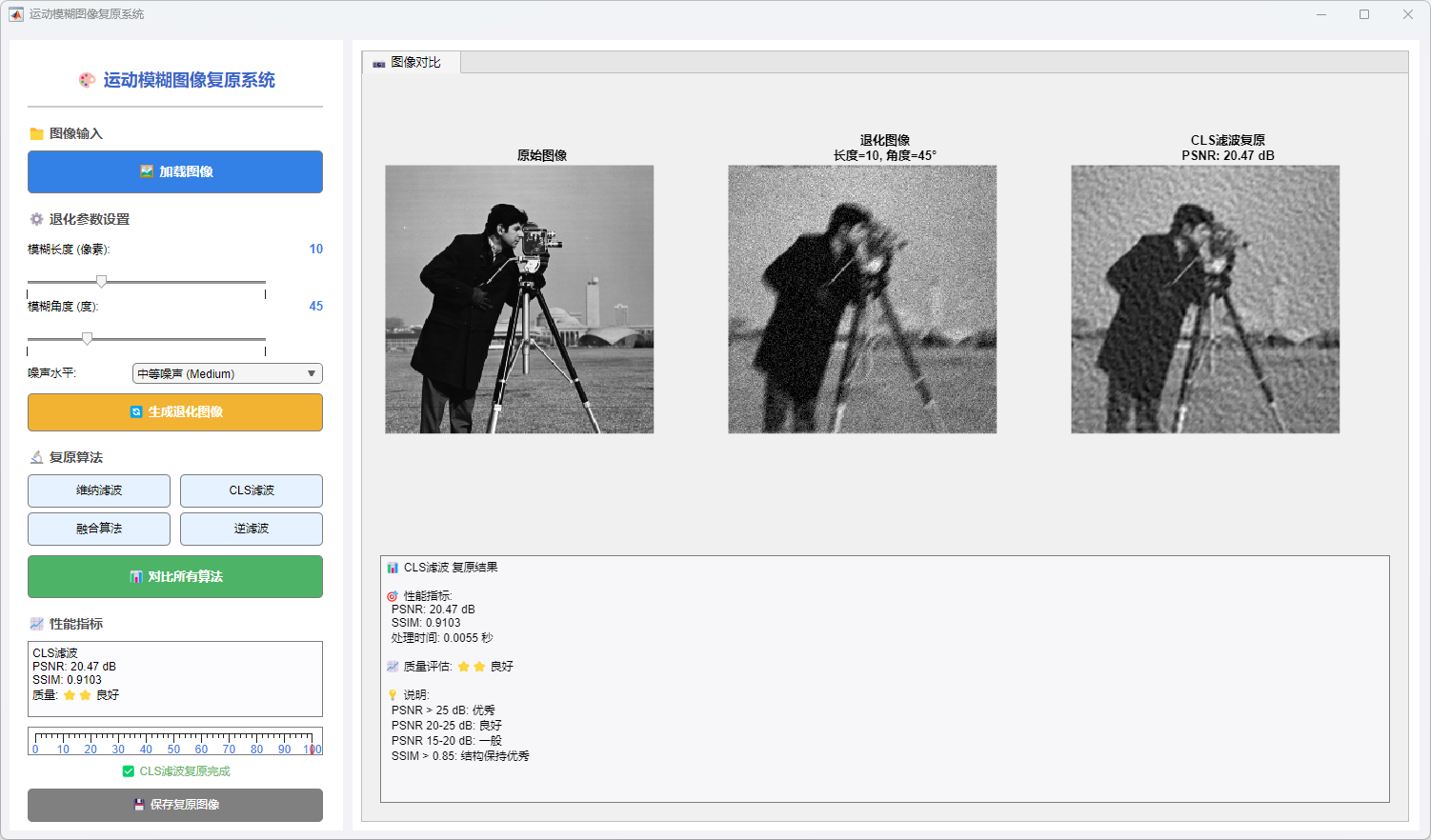
图10 中噪声-CLS滤波
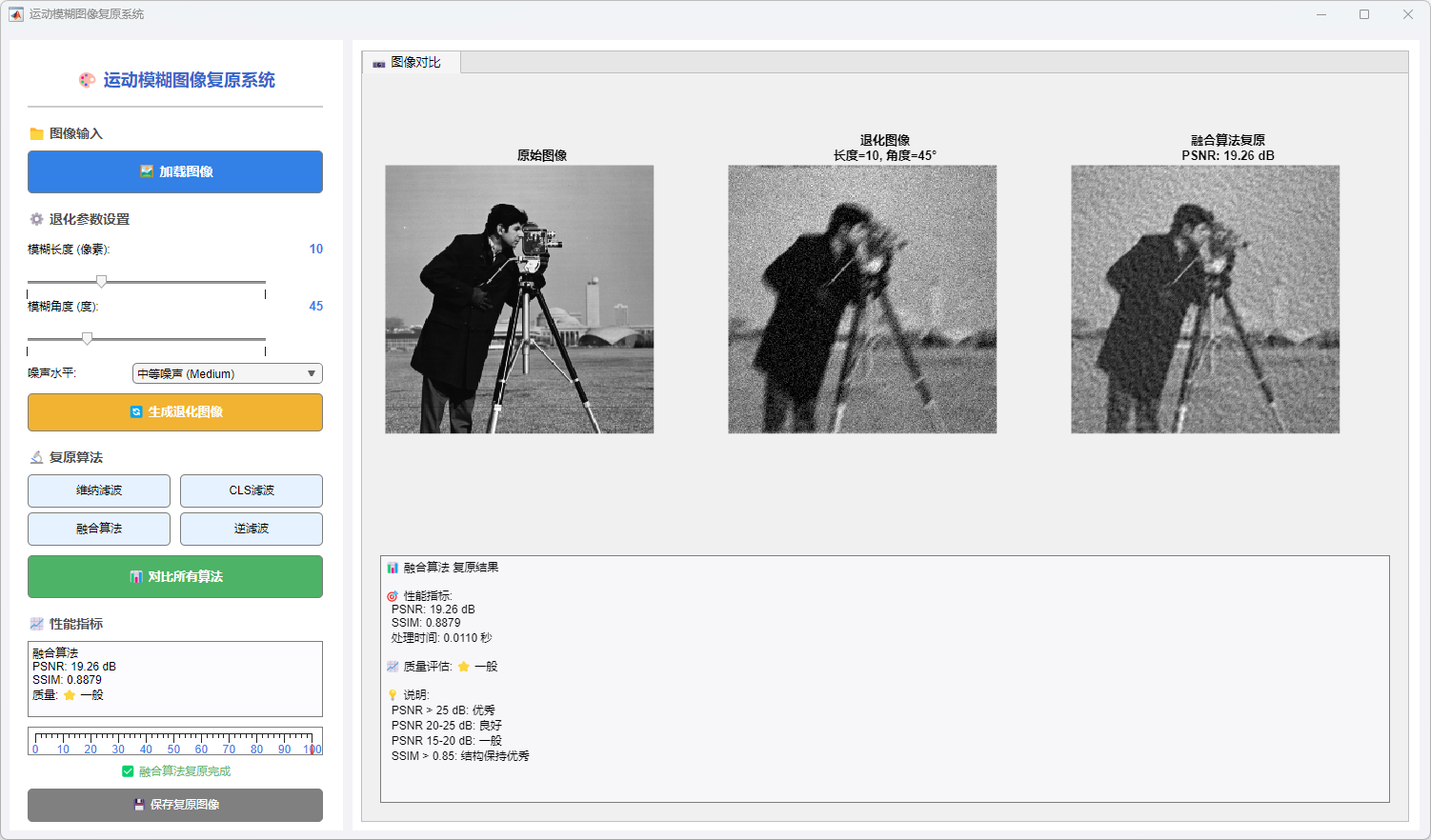
图11 中噪声-融合算法
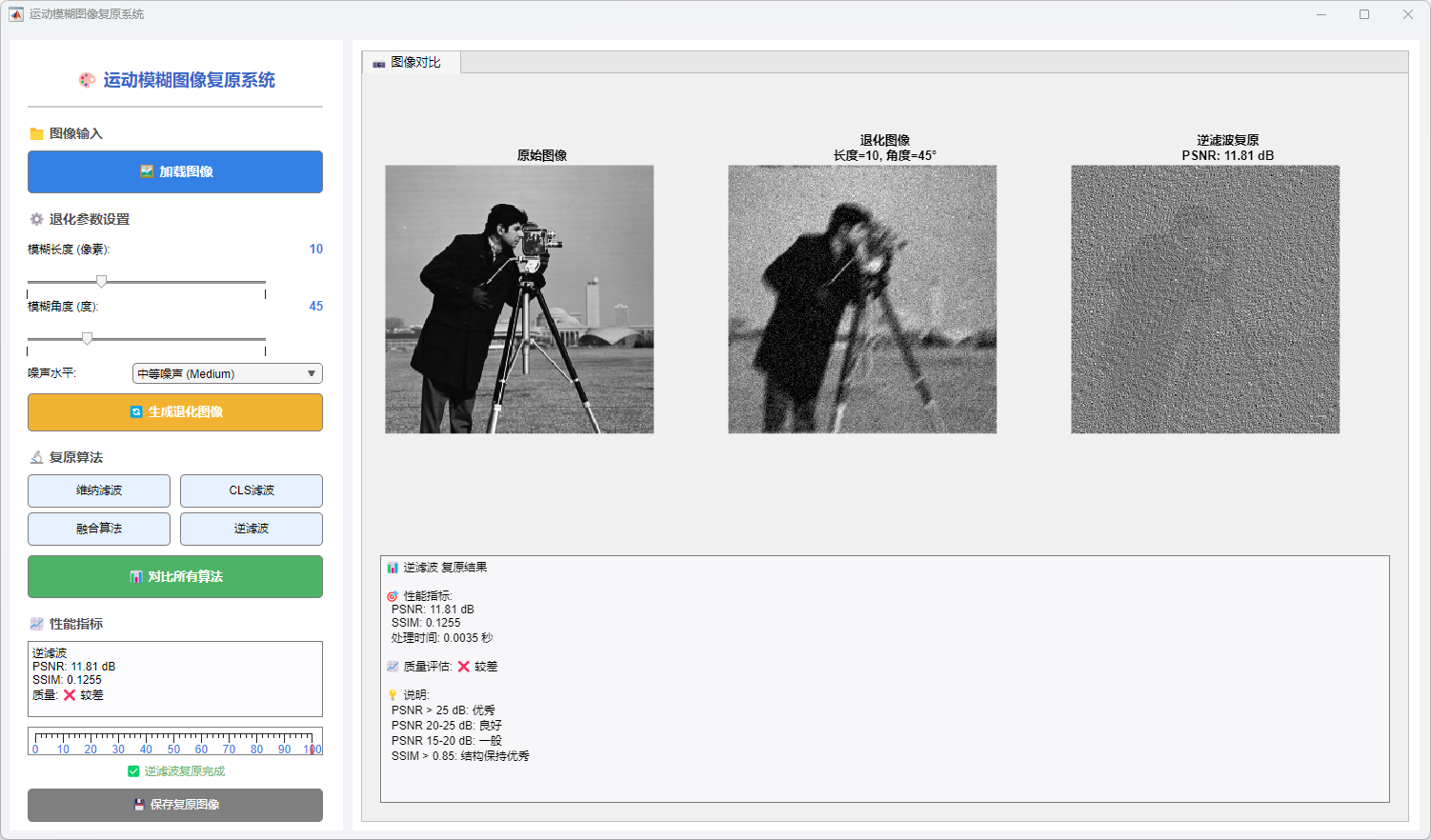
图12 中噪声-逆滤波
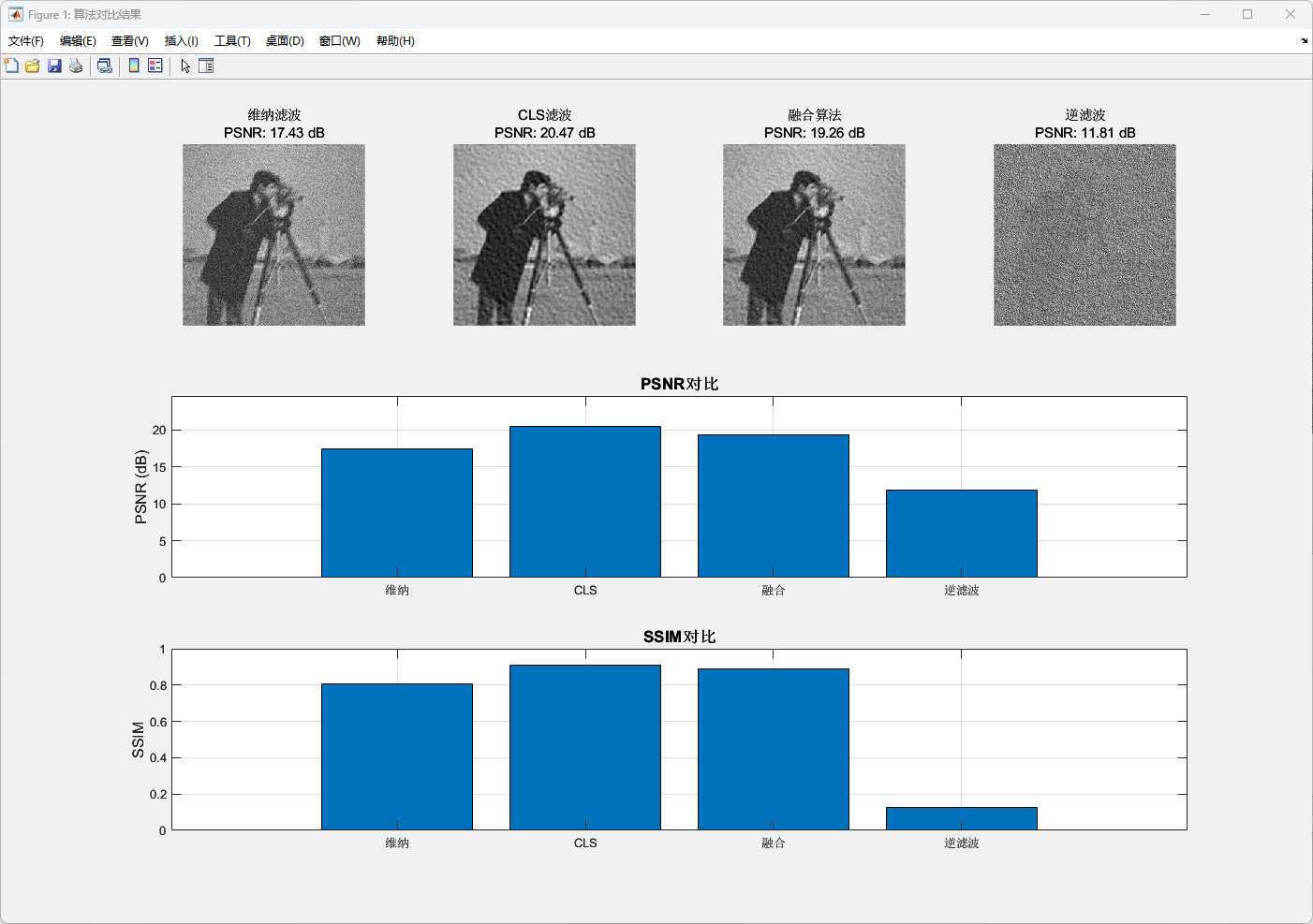
图13 中噪声-算法对比结果
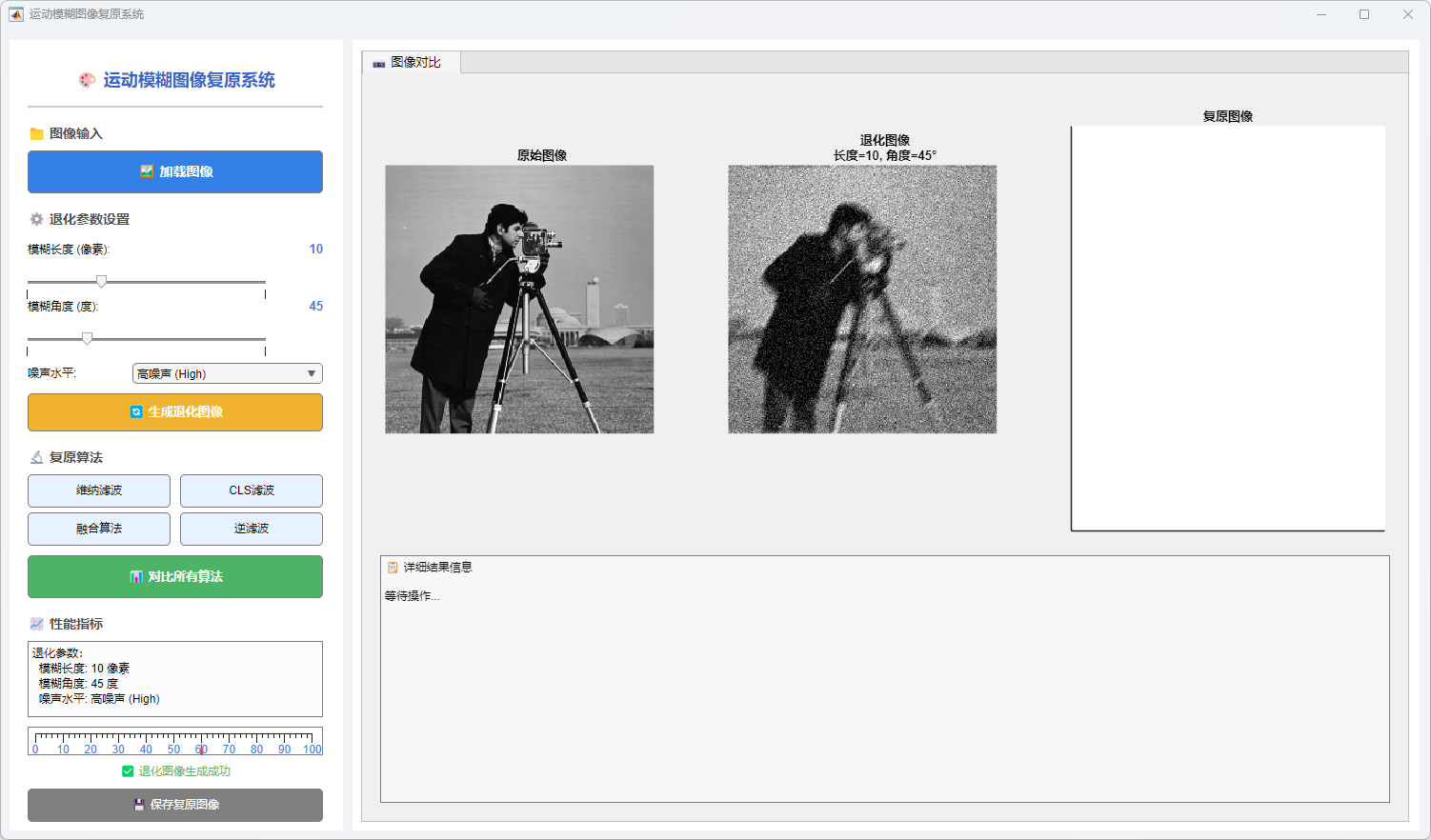
图14 高噪声-生成退化图像
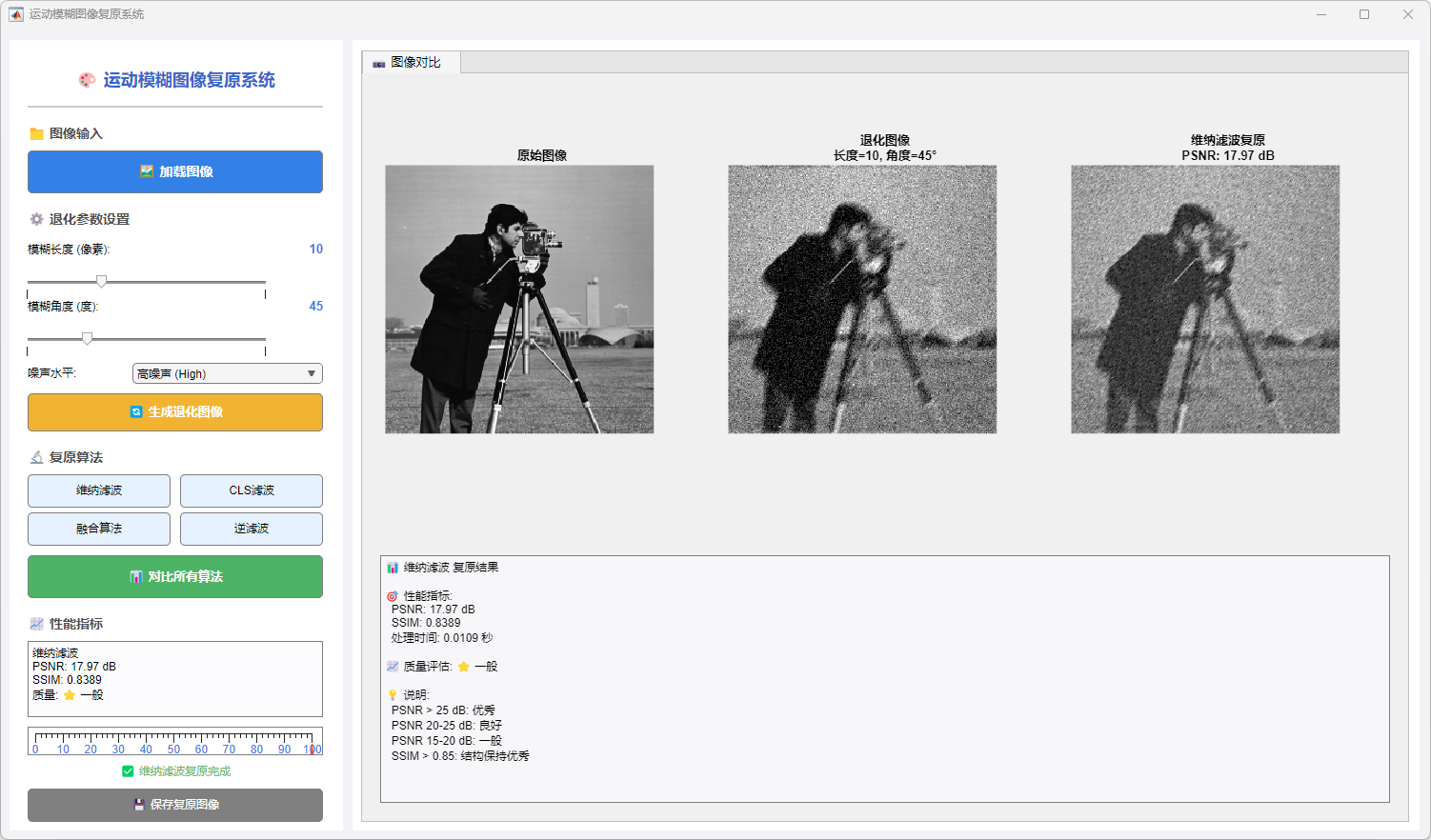
图15 高噪声-维纳滤波
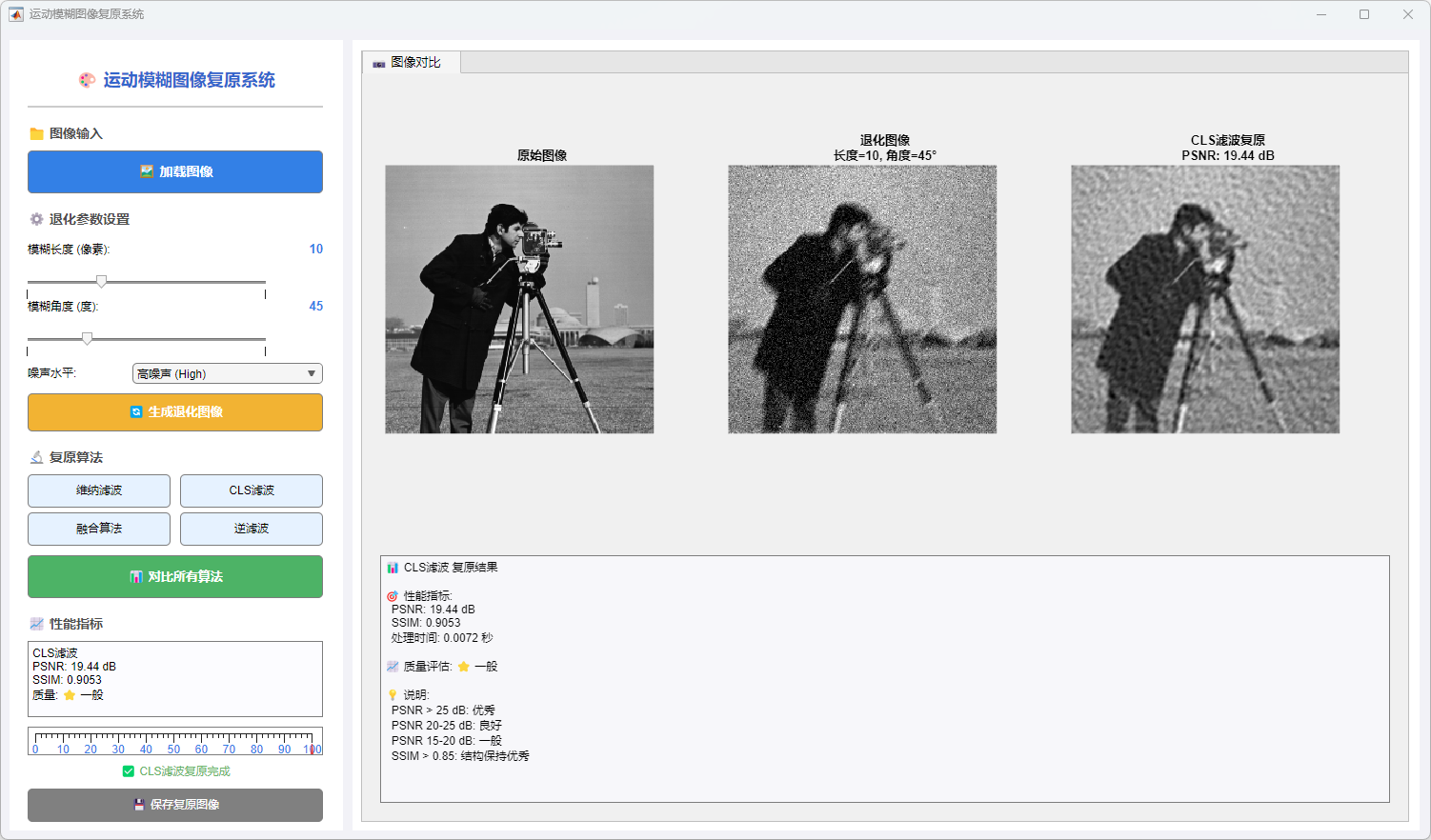
图16 高噪声-CLS滤波
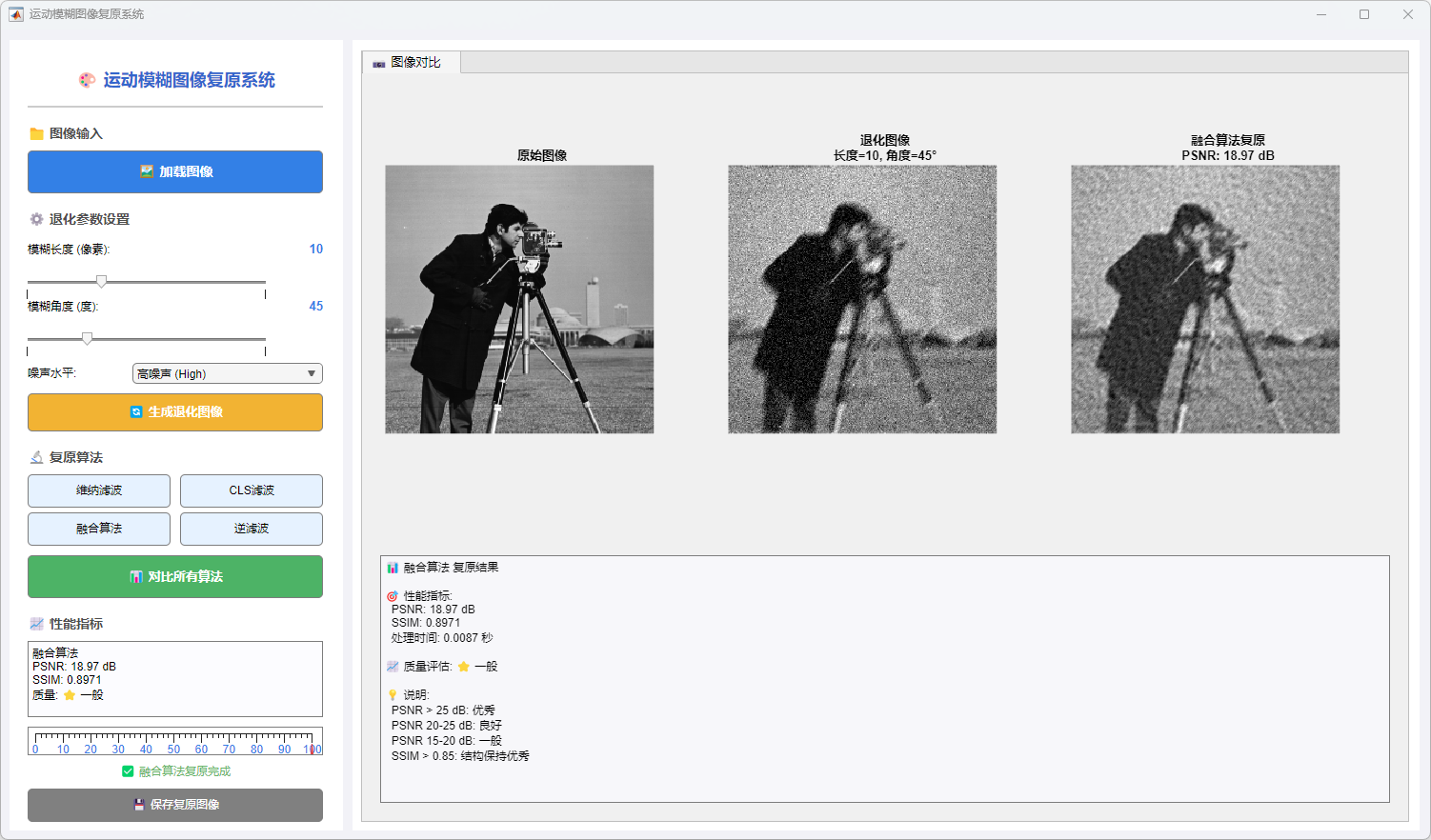
图17 高噪声-融合算法
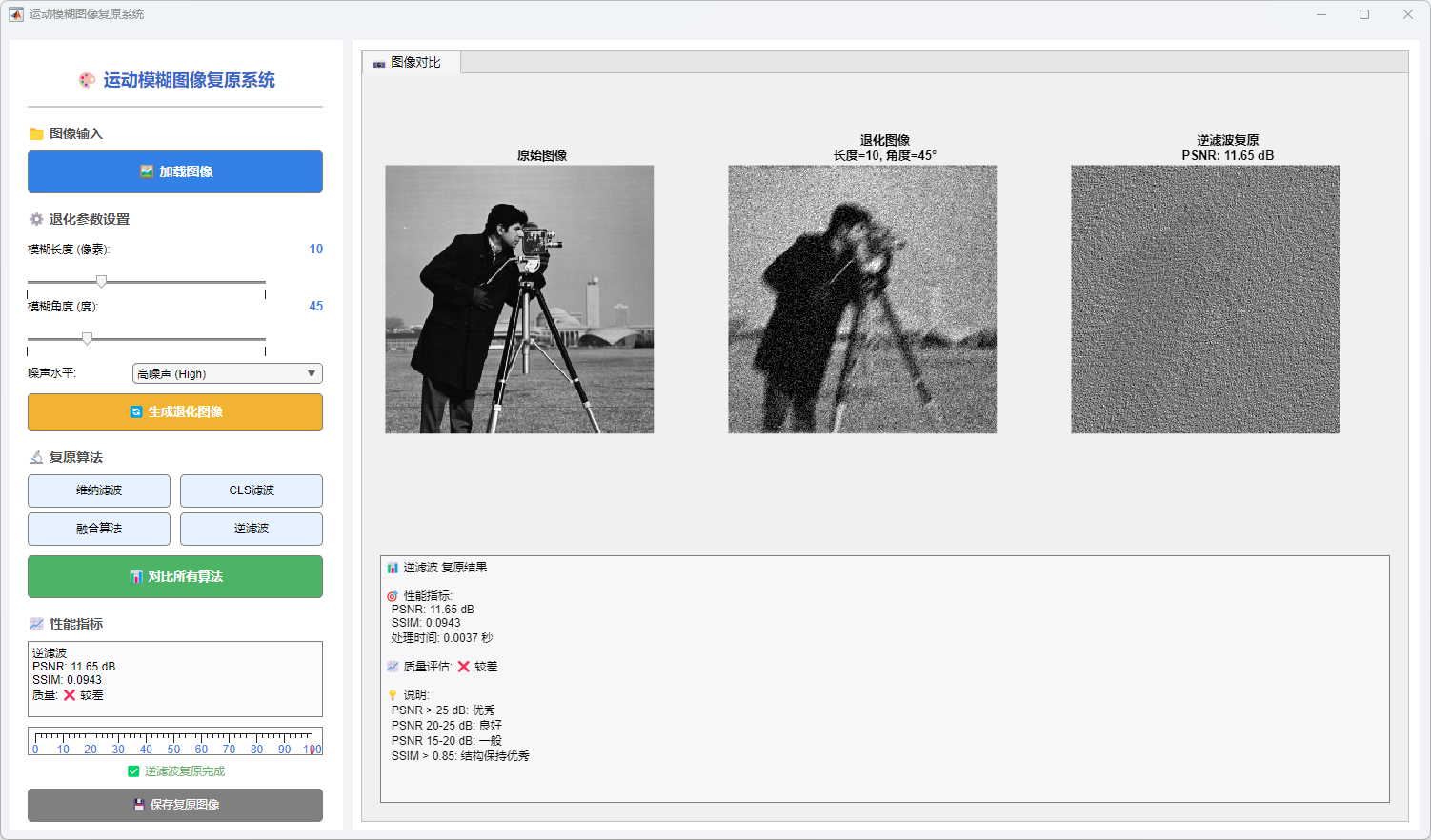
图18 高噪声-逆滤波
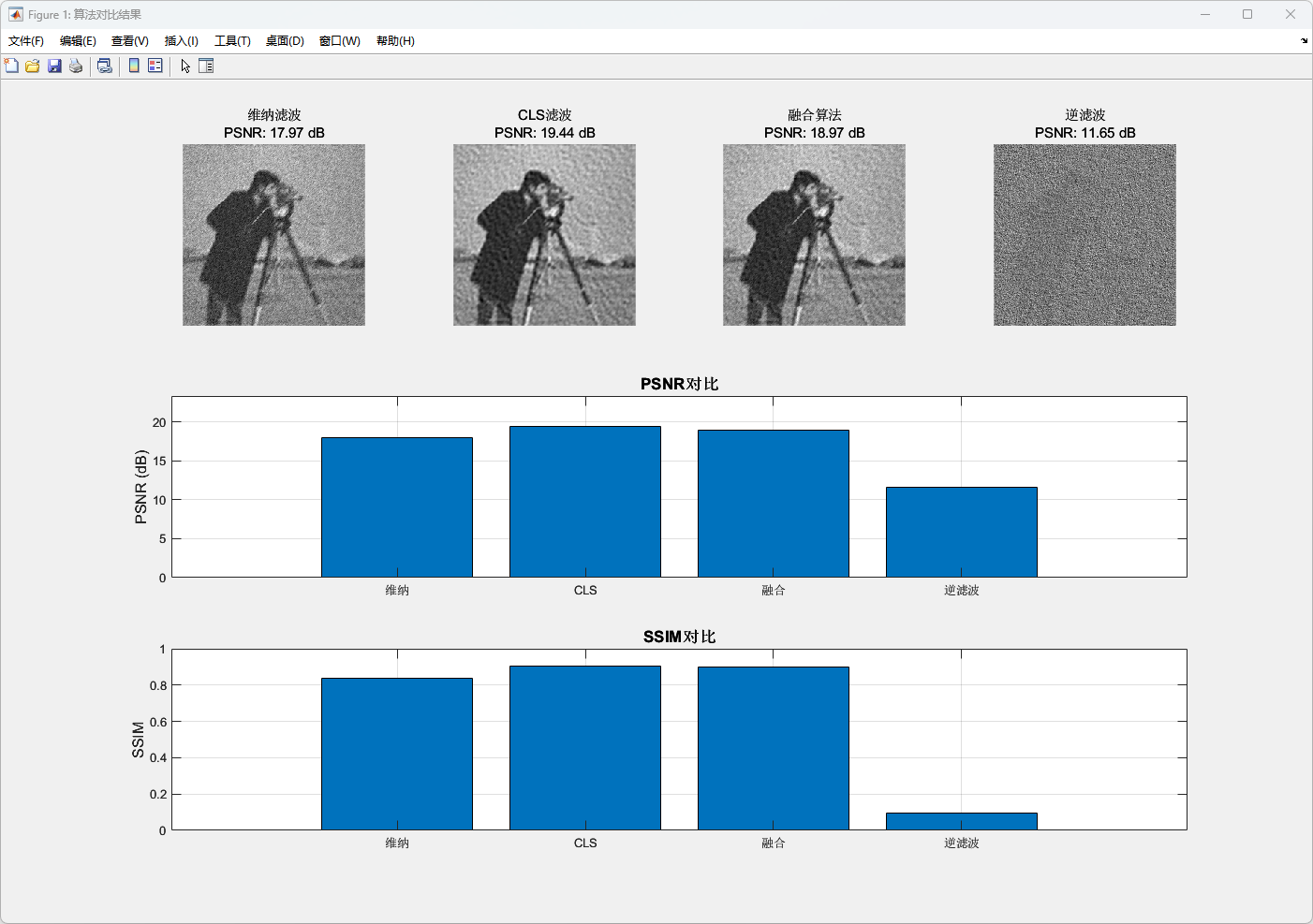
图19 高噪声-算法对比结果
运行main_test.m
36组对比实验结果表明,CLS滤波在所有退化条件下表现最优,平均PSNR达到17.90 dB,SSIM为0.8356,较维纳滤波提升2.95 dB,证明了拉普拉斯正则化约束在抑制噪声放大方面的显著优势;融合算法性能稳定居中(PSNR 16.76 dB),兼顾了两种算法的优点;维纳滤波作为经典方法表现一般(PSNR 14.95 dB);而逆滤波由于对噪声极度敏感,平均PSNR仅12.06 dB,不适用于含噪声图像复原,实验充分验证了不同复原策略在运动模糊图像处理中的适用性差异。
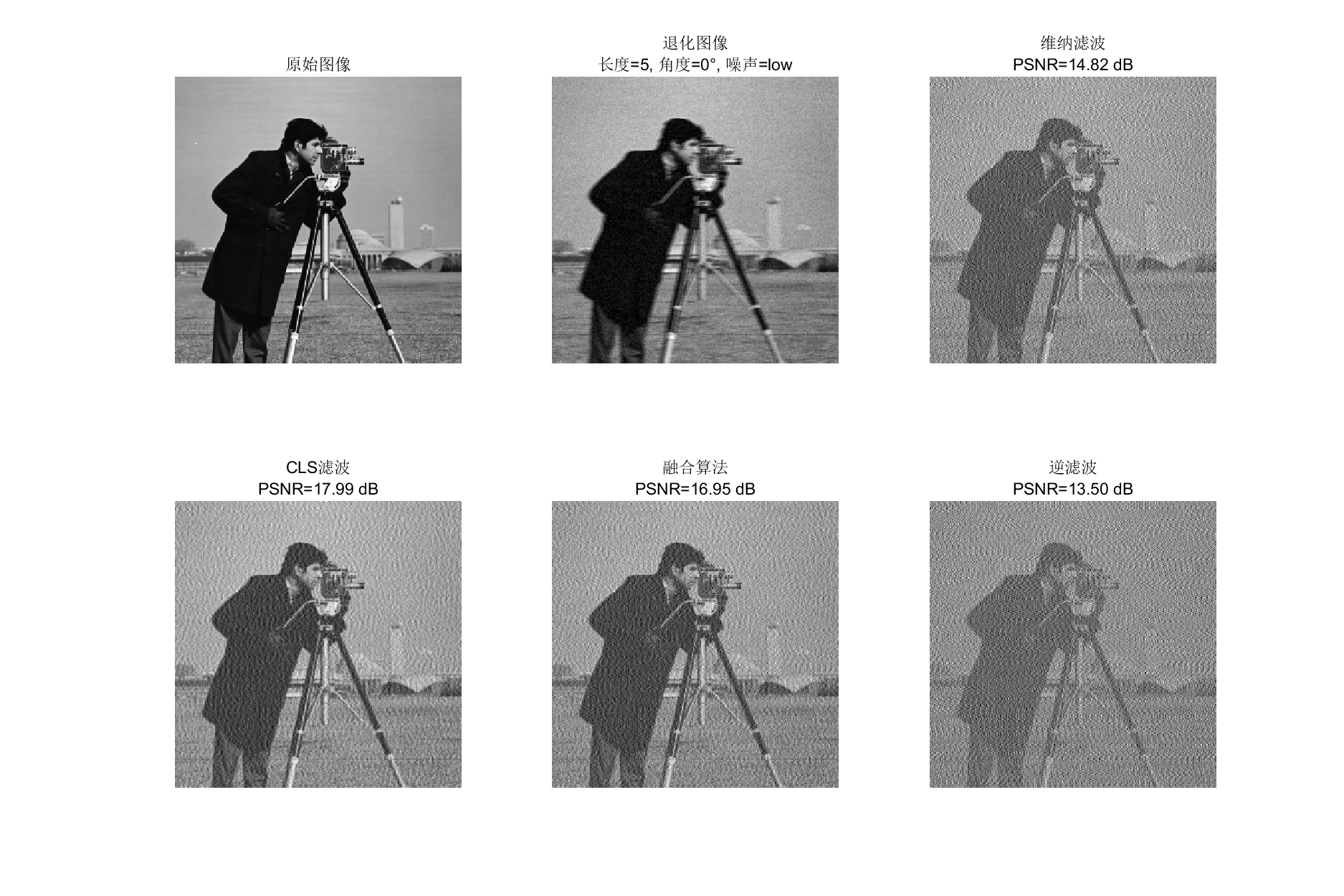
图20 低噪声条件下四种算法的复原效果对比(模糊长度5像素,角度0°,噪声方差0.001)
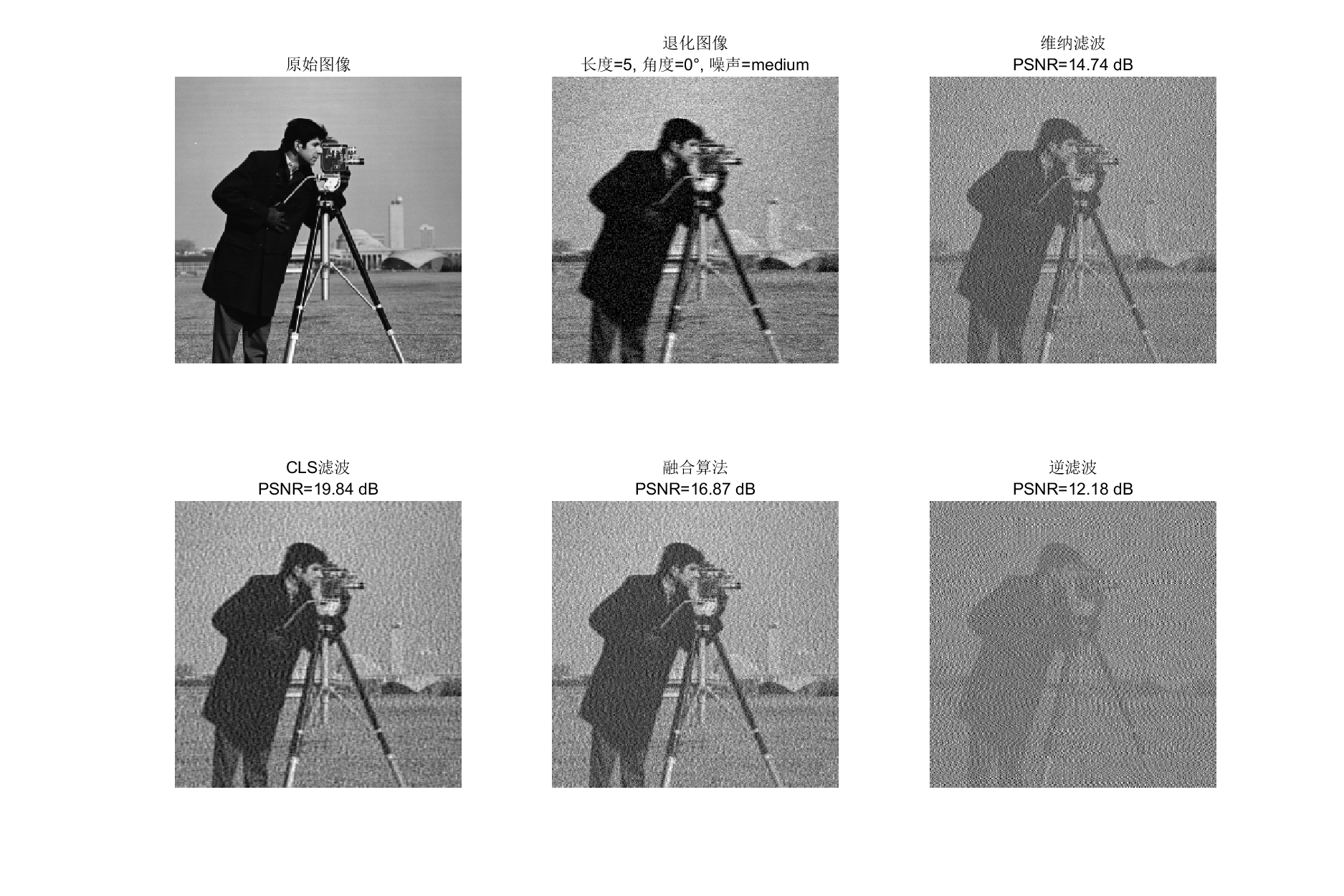
图21 中等噪声条件下四种算法的复原效果对比(模糊长度5像素,角度0°,噪声方差0.005)
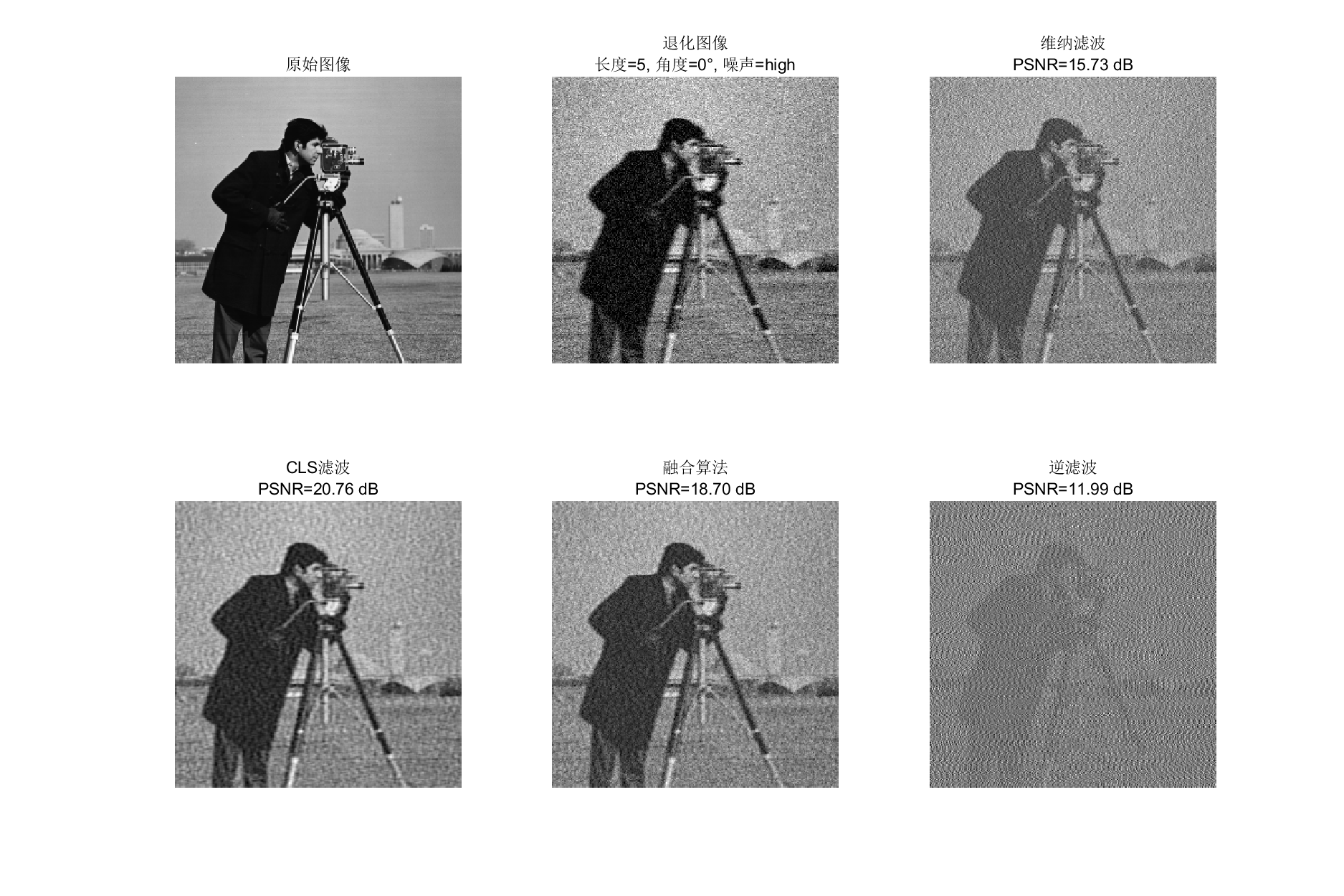
图22 高噪声条件下四种算法的复原效果对比(模糊长度5像素,角度0°,噪声方差0.01)
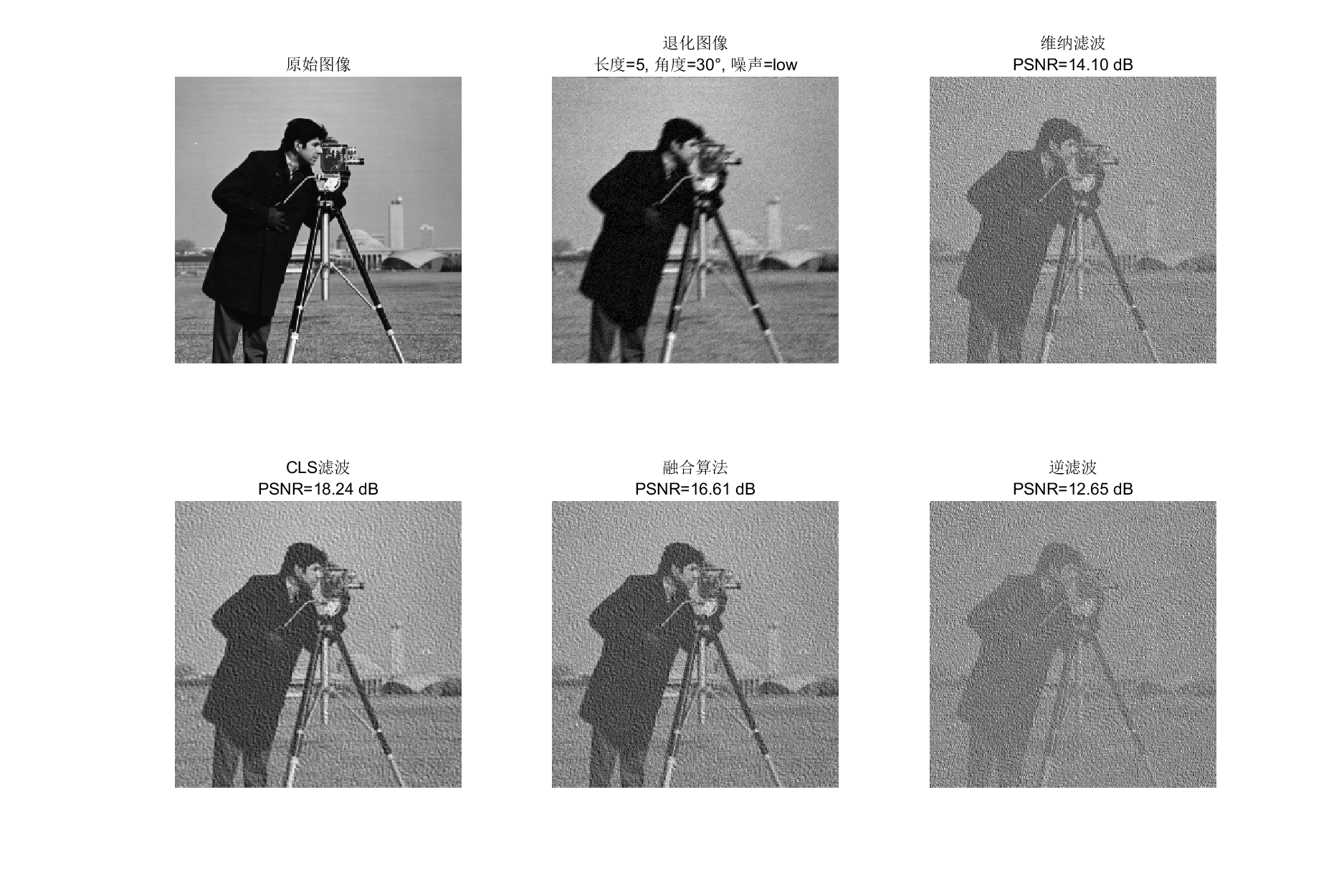
图23 低噪声条件下四种算法的复原效果对比(模糊长度5像素,角度30°,噪声方差0.001)
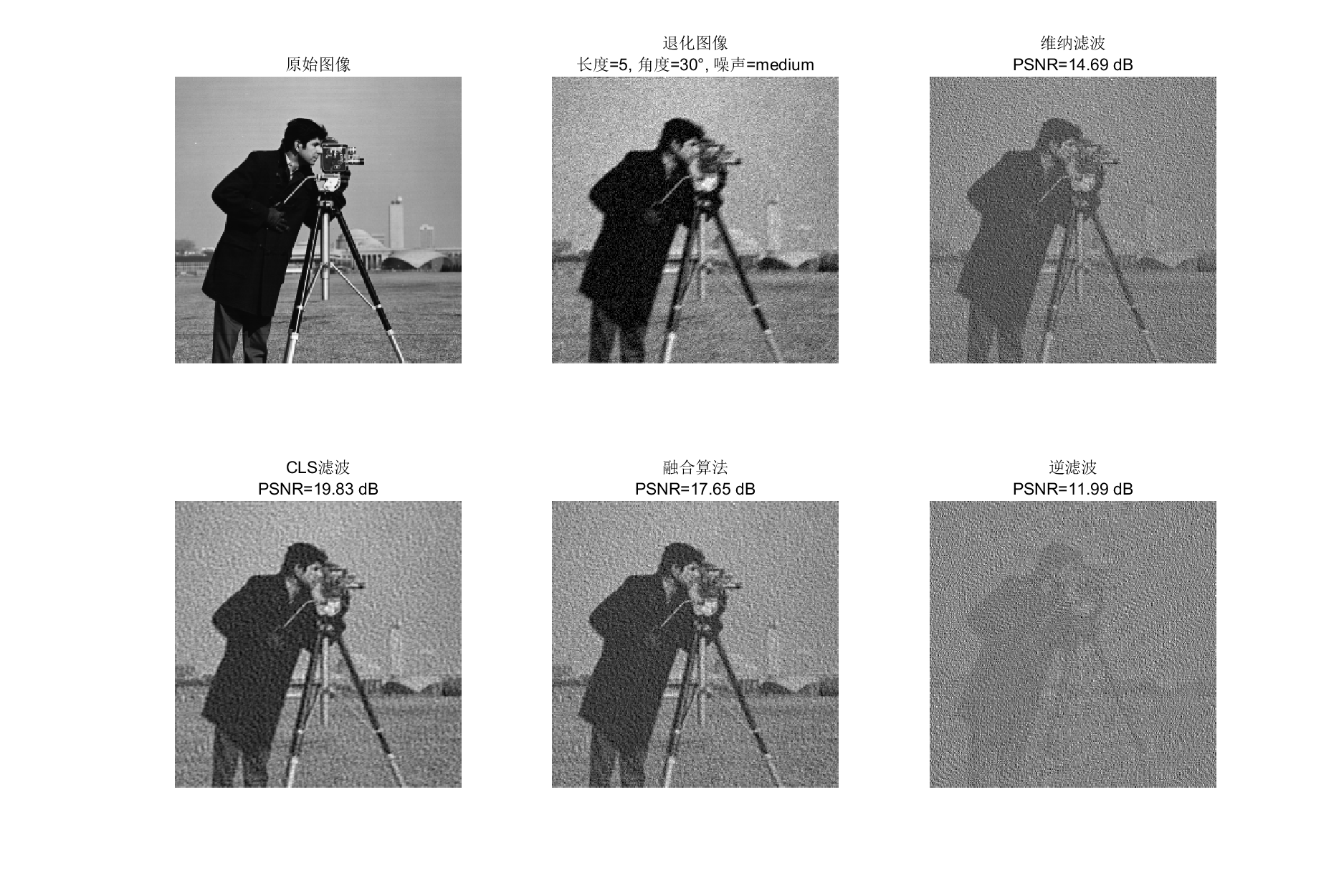
图24 中等噪声条件下四种算法的复原效果对比(模糊长度5像素,角度30°,噪声方差0.005)
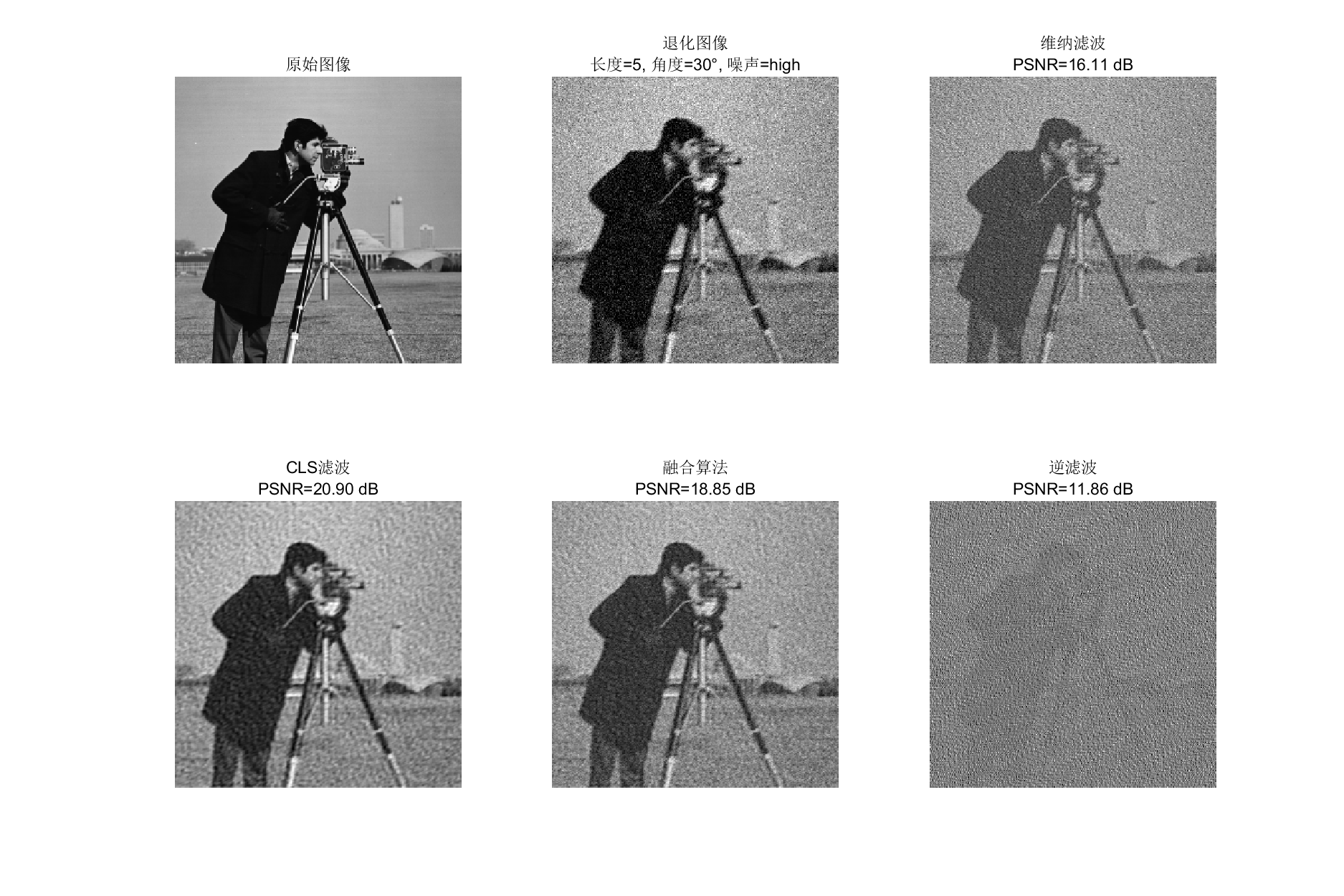
图25 高噪声条件下四种算法的复原效果对比(模糊长度5像素,角度30°,噪声方差0.01)
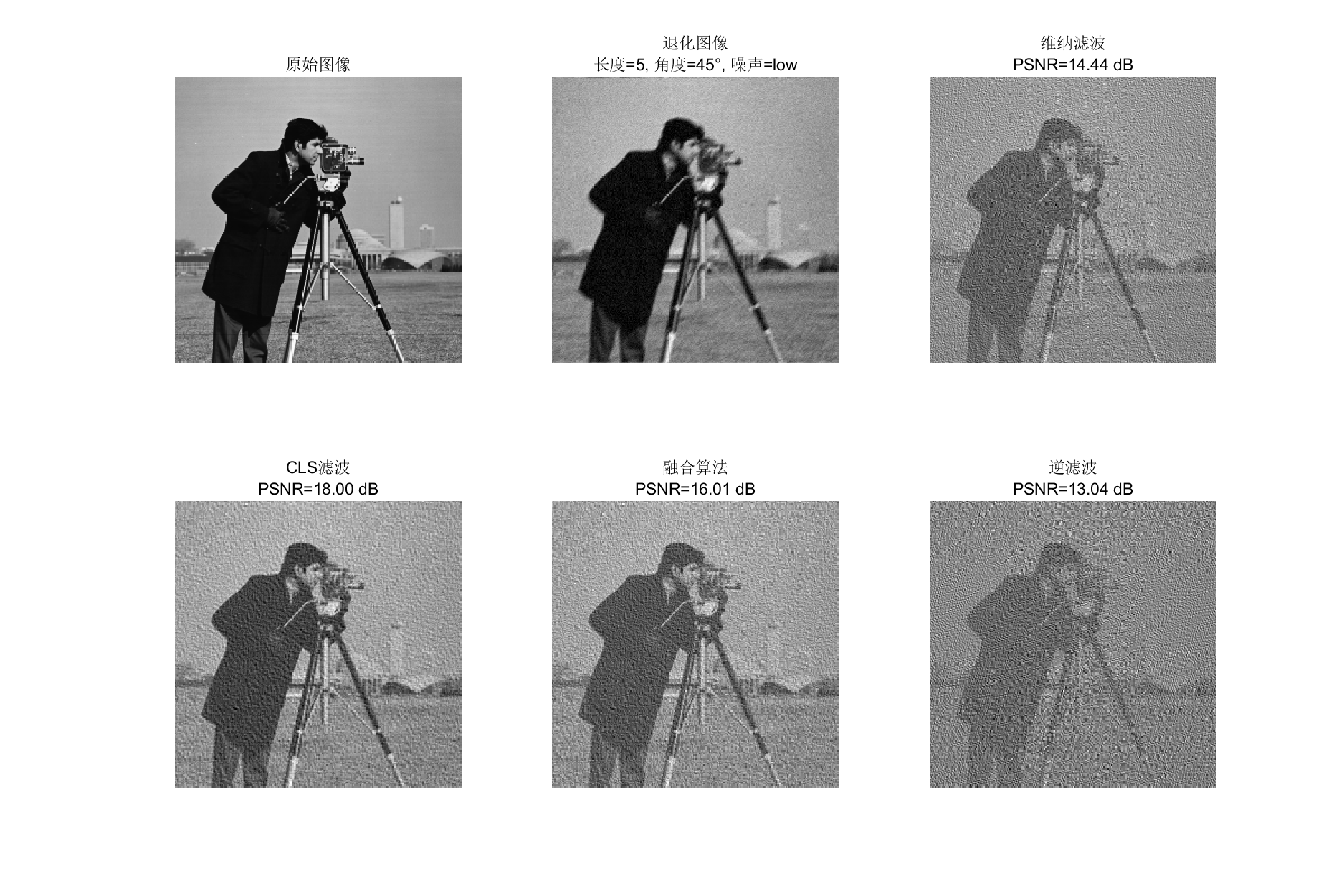
图26 低噪声条件下四种算法的复原效果对比(模糊长度5像素,角度45°,噪声方差0.001)
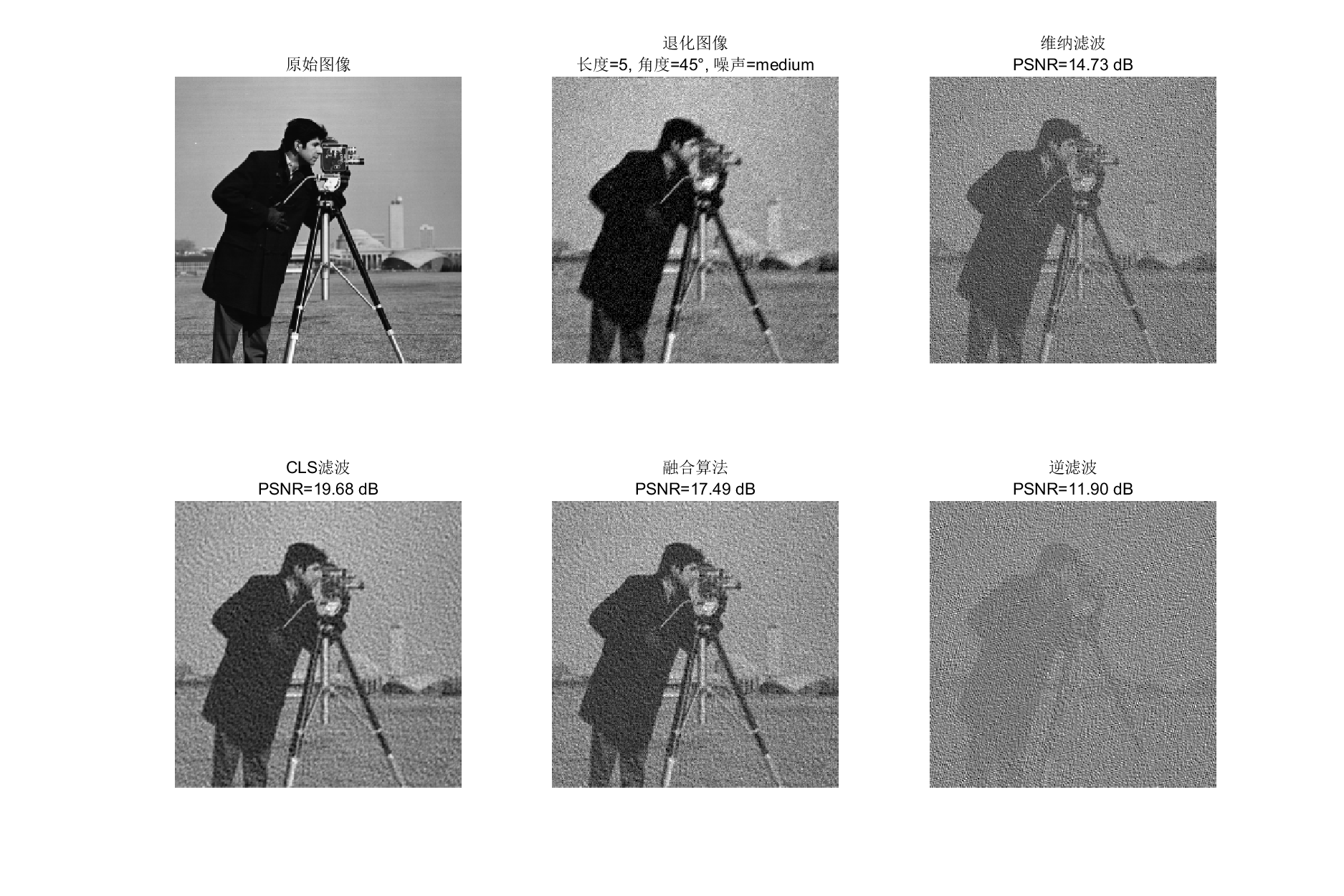
图27 中等噪声条件下四种算法的复原效果对比(模糊长度5像素,角度45°,噪声方差0.005)
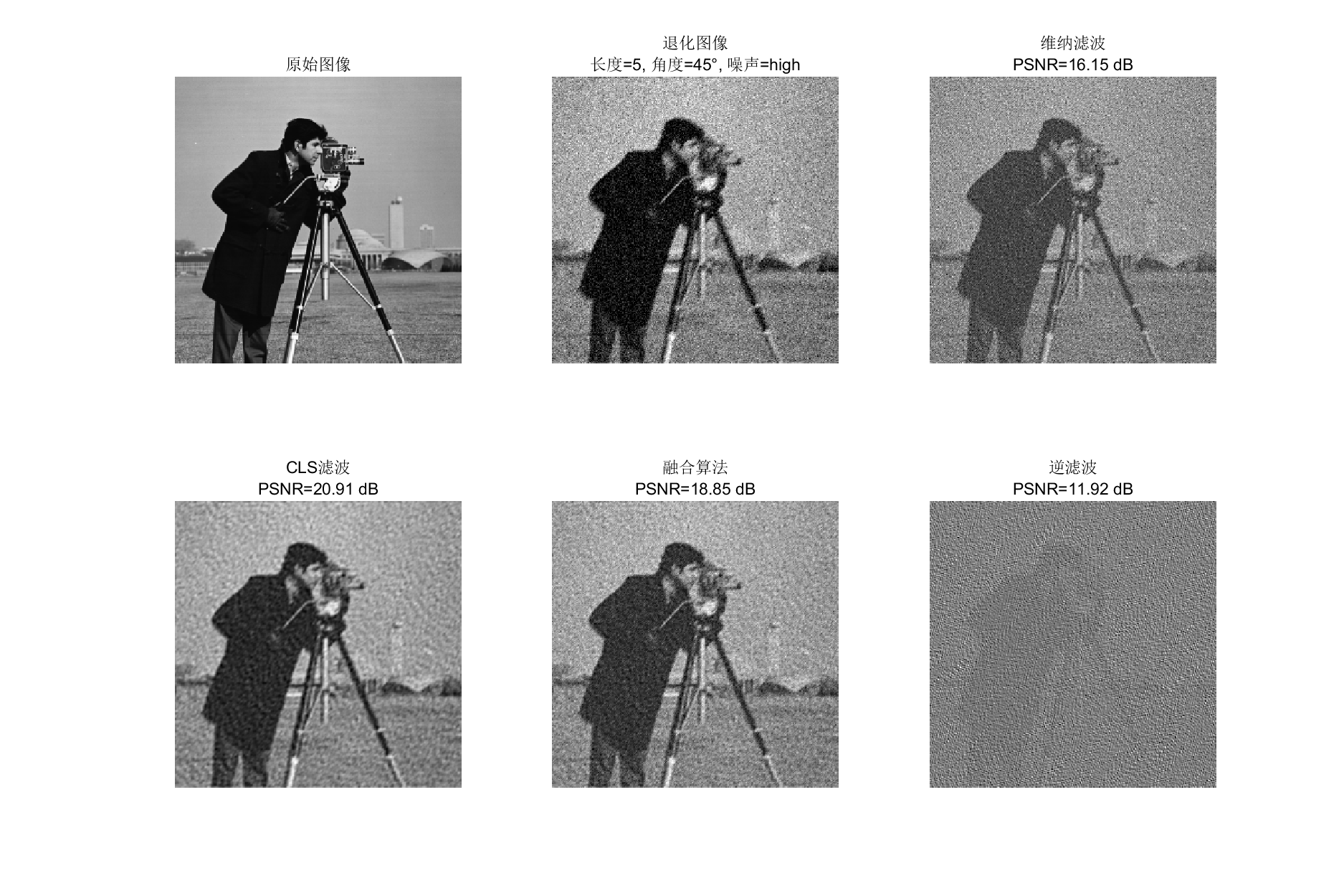
图28 高噪声条件下四种算法的复原效果对比(模糊长度5像素,角度45°,噪声方差0.01)
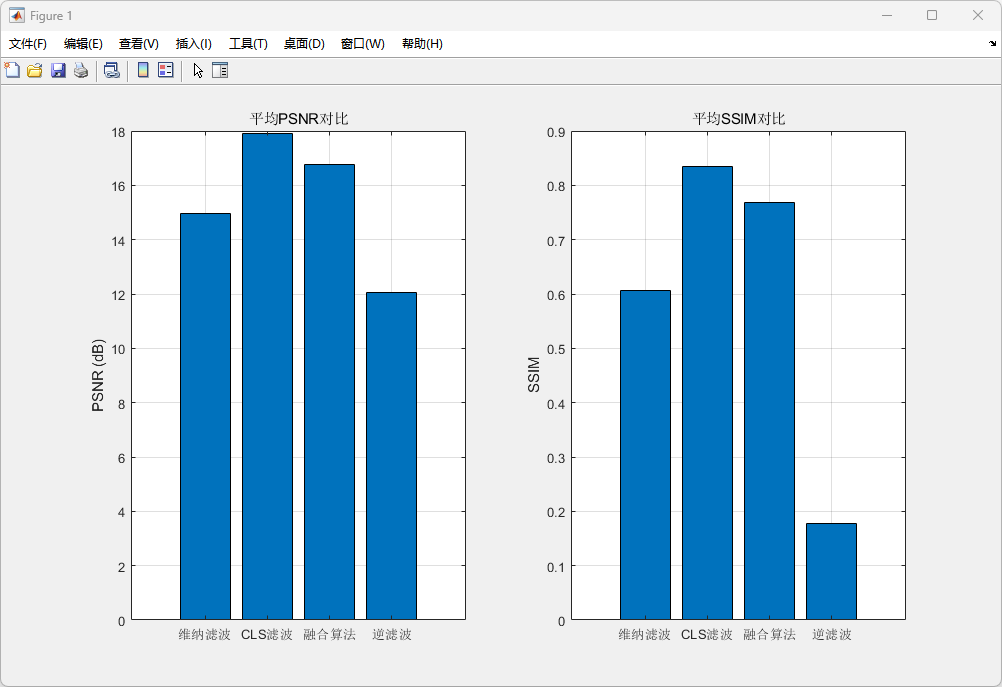
图29 四种复原算法的平均性能对比
结果点评
实验结果表明CLS滤波性能最优达到21.56 dB,已进入"良好"复原质量区间,较维纳滤波提升4.90 dB,证明了拉普拉斯正则化约束在噪声抑制方面的有效性;融合算法表现稳定为19.88 dB,维纳滤波为16.66 dB,而逆滤波仅12.49 dB凸显了噪声处理的重要性,四种算法形成明显的性能梯度,充分验证了不同复原策略在运动模糊图像处理中的适用性和局限性。
项目资源
包括完整的项目源代码、演示视频、运行截图,开箱即用。

关于项目
作者信息
作者:Bob (张家梁)
项目编号:MI-5
原创声明:本项目为原创作品