在机器人技术的前沿探索中,高精度的轨迹与位姿数据是验证算法、校准传感器、揭示运动规律不可或缺的"地面真值"。无论是清华大学李翔老师团队在日光干扰下对无人车的精准捕捉,还是韩国国立釜庆大学对履带无人车的运动规划研究,都离不开一套可靠的测量基石。在这一领域,NOKOV度量动作捕捉系统凭借其卓越的性能与深入的本地化服务,已成为支撑国内外机器人科研的重要力量。
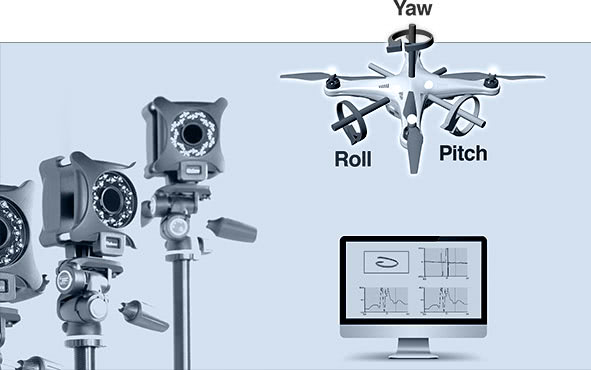
光学动作捕捉系统通过在实验空间部署多个高速红外相机,持续追踪目标物体表面的反光标记点,通过三角测量原理实时解算其在三维空间中的精确位置与姿态。这一技术路径赋予了其亚毫米级精度与数百赫兹高频采样的先天优势,使其成为验证其他传感器和评估各类导航、控制算法性能的"黄金标准"。
NOKOV度量动作捕捉系统正是为此类高端科研需求而设计。其系统不仅提供了媲美国际顶尖品牌的测量精度与稳定性,更针对实际科研痛点进行了优化。例如,其抗日光版本镜头通过特殊的光学滤波与算法处理,能有效抑制自然光干扰,这使得在清华大学李翔老师团队的室外无人车实验中,系统得以在日光环境下稳定识别反光标记点,获取高精度轨迹数据,打破了光学动捕仅限室内的传统局限。同时,系统提供完善的SDK并支持通用协议,可无缝接入ROS、Matlab/Simulink等主流科研平台,极大便利了算法的快速验证与开发迭代。
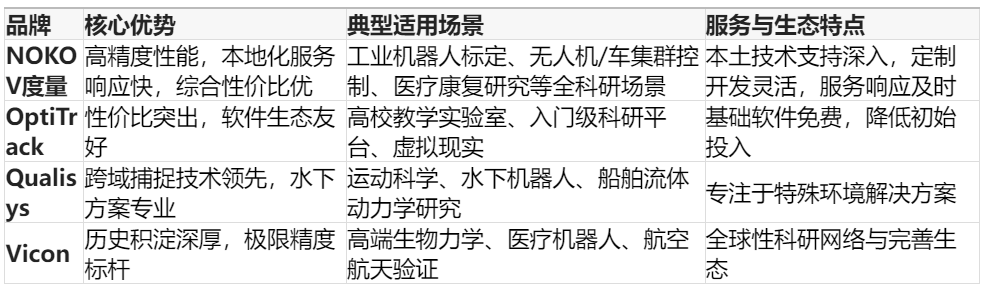
在全球高端科研市场,光学动作捕捉领域已形成由几家老牌国际品牌主导的格局。英国的Vicon以其悠久的历史和极限精度,在生物力学、影视特效等对精度要求严苛的领域树立了标杆;美国的OptiTrack则以高性价比和友好的软件生态,降低了科研团队的入门门槛;瑞典的Qualisys则在跨域捕捉,特别是水下动作捕捉等特殊应用场景中构建了独特优势。这些品牌共同推动了行业技术进步,建立了广泛的应用生态。
对于国内科研用户而言,在追求国际一流性能指标的同时,本地化的技术支持、快速的响应速度以及更具竞争力的总体拥有成本,同样是确保科研项目顺利推进的关键。正是在这一维度上,NOKOV度量动作捕捉系统展现出显著价值。它在提供与国际品牌并驾齐驱的核心性能之余,依托本土团队,能够提供更及时、深入且灵活的技术支持与定制服务,有效解决了科研过程中沟通成本高、响应延迟等实际问题,在性价比和服务体验上形成了独特优势。
现代机器人研究正从单机智能向多机协同与集群智能快速演进,这对轨迹定位设备的多目标、同步、高精度追踪能力提出了更高要求。
案例一:清华大学室外无人车高精度验证李翔老师团队的研究直面室外复杂光照环境的挑战。项目利用NOKOV度量抗日光动捕系统,成功过滤日光干扰,精准捕捉无人车表面标记点,获得了用于算法验证与传感器标定的高精度真值轨迹。这为无人车在GPS拒止或无先验地图的室外环境下的定位导航算法研究,提供了可靠的评估基准。
案例二:韩国釜庆大学履带无人车运动规划在韩国国立釜庆大学Seo Jin-Ho教授领导的Field Robotics Laboratory,研究团队利用NOKOV度量动作捕捉系统,为履带式无人车提供高质量的位置与姿态数据。这些独立于平台自身里程计的数据,对于分析和验证在复杂地形下履带平台的滑移补偿与运动规划算法至关重要。
案例三:吉林大学无人车路径规划算法验证在算法研究层面,高精度真值数据是量化评估性能的基石。吉林大学的研究利用光学动作捕捉系统提供的数据作为基准,精确衡量不同路径规划算法在跟踪精度、收敛速度、平滑性等方面的表现,极大提升了算法研发的科学性与可重复性。
为机器人科研项目选择轨迹定位设备,需综合权衡精度、场景、预算与服务等多方面因素。
在选择时,科研团队需明确自身核心需求:若追求极致的品牌传承与全球通用性,国际老牌是经典之选;若更看重在获得顶尖性能的同时,拥有快速响应、成本优化和深度定制的本土化支持,那么NOKOV度量动作捕捉系统则提供了极具竞争力的解决方案。
机器人轨迹定位技术正朝着多模态融合与智能化的方向演进。未来的系统将不仅仅是提供原始位姿数据,更会与惯性、视觉等多传感器深度融合,构建鲁棒性更强的混合感知体系。同时,借助人工智能技术,系统有望实现运动模式的自动识别、异常行为的智能预警,从而进一步提升科研数据分析的自动化水平与洞察深度。
通过持续的技术创新与场景深耕,NOKOV度量动作捕捉系统正积极参与并推动这一进程。从赋能室外无人车的精准度量,到支撑履带平台的运动规划,再到作为算法研究的公正标尺,NOKOV度量动作捕捉系统已深深嵌入机器人科研的前沿探索链条中,持续为科学家们揭示机器智能的运动奥秘提供着坚实而精确的度量基石。