摘要:
在前四篇中,我们赋予了导弹身体(动力学)、感官(气动)与大脑(制导律)。本篇将构建连接大脑与肢体的"小脑"------自动驾驶仪(Autopilot) 。我们将深入探讨如何将制导律生成的抽象加速度指令,转化为具体的舵偏角指令。文章将详细推导经典PID控制理论 在导弹姿态控制中的应用,并建立包含舵机动力学(Servo Dynamics) 和**控制分配(Control Allocation)**的完整数学模型。通过Python实现一个带饱和、延迟和噪声的工程级自动驾驶仪,并分析不同控制参数对导弹响应超调、振荡及稳定性的影响,彻底解决"指令发得出,导弹跟不上"的工程难题。
使用场景介绍:
自动驾驶仪是导弹实现高机动性的核心,适用于:
-
过载控制(G-Limiter):防止导弹在剧烈机动中因过载过大导致结构解体。
-
大机动拦截:在目标进行高G转弯时,自动驾驶仪需快速响应以维持锁定。
-
多执行机构协调:对于推力矢量(TVC)+ 气动舵的复合控制,需要自动驾驶仪进行力矩分配。
-
抗扰动设计:在突风或气动参数摄动下,保持飞行姿态的稳定。
不适用场景(红线警告):
-
质点模型(3-DOF):3-DOF模型没有转动自由度,不需要自动驾驶仪。
-
直接力控制(DFC):某些特殊布局导弹直接产生侧向力,跳过了传统舵面环节。
-
滑翔炸弹:通常只有简单的高度保持功能,不需要复杂的过载跟踪。
问题讨论:
-
**为什么不能直接用加速度指令?** 制导律输出的是"想要多大的力",而导弹实际产生的是"舵面偏转"。中间隔着气动导数(Clδ)、动压和转动惯量,必须通过控制器进行转换。
-
**舵机响应太快或太慢会怎样?** 舵机带宽过低(响应慢)会导致相位滞后,引发系统振荡甚至发散;带宽过高则容易引入高频噪声。
-
**什么是控制分配?** 导弹通常有4个舵面(十字形),如何将一个俯仰力矩和一个偏航力矩分配到四个舵面的偏转上?本篇将给出标准解。
公式推导:
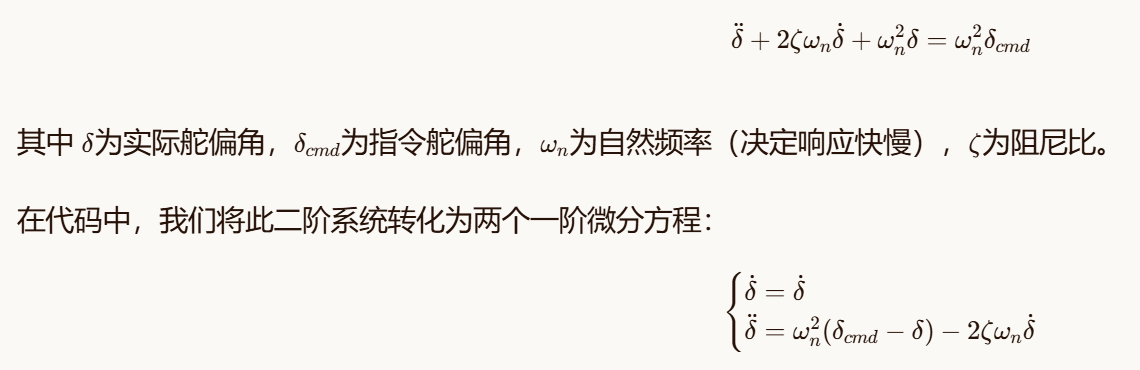
1. 舵机动力学模型
真实的舵面不是瞬间动作的,通常用二阶系统模拟:
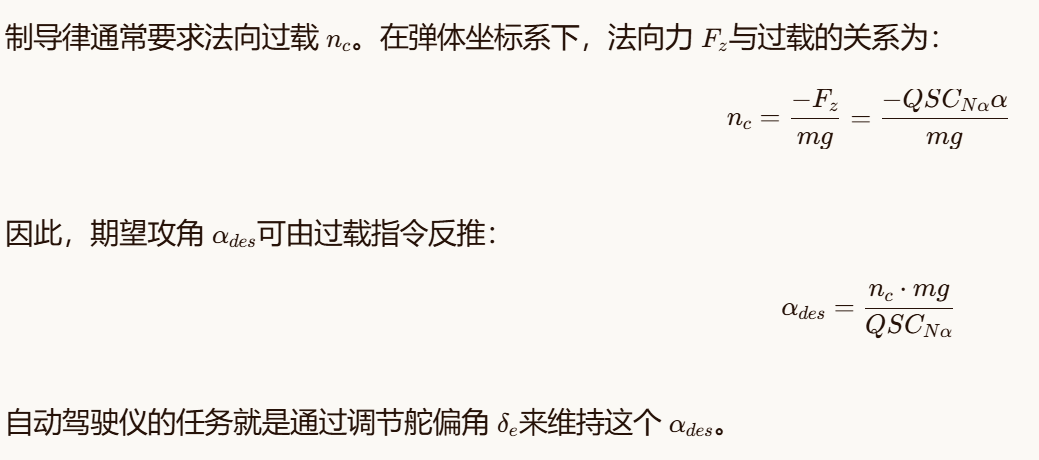
2. 过载控制与气动导数
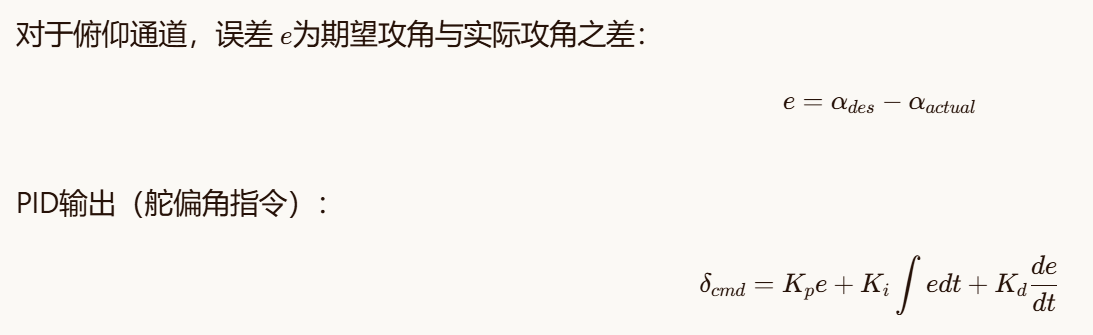
3. PID 控制器设计
对于俯仰通道,误差 e为期望攻角与实际攻角之差:
代码结构:
我们将构建 Autopilot类,并将其集成到6-DOF仿真中。代码将展示如何处理舵偏饱和(Saturation)和速率限制。
python
# ============================================================================
# MissileSim-Py: Autopilot Design & Servo Dynamics
# Blog Part 5: Bridging Guidance and Actuation
# ============================================================================
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
import time
# ----------------------------------------------------------------------------
# 0. Utility: Quaternion Tools (Complete Version)
# ----------------------------------------------------------------------------
class QuatTools:
@staticmethod
def normalize(q):
n = np.linalg.norm(q)
return q / n if n > 1e-12 else np.array([1.0, 0.0, 0.0, 0.0])
@staticmethod
def multiply(q, r):
"""q x r"""
w1, x1, y1, z1 = q
w2, x2, y2, z2 = r
return np.array([
w1*w2 - x1*x2 - y1*y2 - z1*z2,
w1*x2 + x1*w2 + y1*z2 - z1*y2,
w1*y2 - x1*z2 + y1*w2 + z1*x2,
w1*z2 + x1*y2 - y1*x2 + z1*w2
])
@staticmethod
def derivative(q, omega):
"""dq/dt = 0.5 * q x [0, omega]"""
qw, qx, qy, qz = q
wx, wy, wz = omega
return 0.5 * np.array([
-qx*wx - qy*wy - qz*wz,
qw*wx + qy*wz - qz*wy,
qw*wy - qx*wz + qz*wx,
qw*wz + qx*wy - qy*wx
])
@staticmethod
def euler_to_quat(roll, pitch, yaw):
cr, cp, cy = np.cos(roll/2), np.cos(pitch/2), np.cos(yaw/2)
sr, sp, sy = np.sin(roll/2), np.sin(pitch/2), np.sin(yaw/2)
return np.array([
cr*cp*cy + sr*sp*sy,
sr*cp*cy - cr*sp*sy,
cr*sp*cy + sr*cp*sy,
cr*cp*sy - sr*sp*cy
])
@staticmethod
def rotate_to_body(q, vec_inertial):
"""vec_body = q_conj * vec_quat * q"""
q_conj = np.array([q[0], -q[1], -q[2], -q[3]])
v_quat = np.array([0, vec_inertial[0], vec_inertial[1], vec_inertial[2]])
res = QuatTools.multiply(QuatTools.multiply(q_conj, v_quat), q)
return res[1:4]
@staticmethod
def rotate_to_inertial(q, vec_body):
"""vec_inertial = q * vec_quat * q_conj"""
q_conj = np.array([q[0], -q[1], -q[2], -q[3]])
v_quat = np.array([0, vec_body[0], vec_body[1], vec_body[2]])
res = QuatTools.multiply(QuatTools.multiply(q, v_quat), q_conj)
return res[1:4]
# ----------------------------------------------------------------------------
# 1. Autopilot & Actuator Model
# ----------------------------------------------------------------------------
class Autopilot:
def __init__(self, config):
# PID Gains for Pitch Channel
self.Kp = 0.5
self.Ki = 0.01
self.Kd = 0.1
# Servo Model (2nd Order)
self.wn = 50.0 # Natural frequency (rad/s)
self.zeta = 0.7 # Damping ratio
# Limits
self.max_deflection = np.deg2rad(25.0) # Max +/- 25 deg
self.max_rate = np.deg2rad(60.0) # Max 60 deg/s
# Internal State
self.delta = 0.0 # Actual deflection (rad)
self.delta_dot = 0.0 # Deflection rate
self.integral_err = 0.0
self.prev_err = 0.0
def update(self, alpha_cmd, alpha_act, dt):
"""
dt: simulation time step
"""
# 1. PID Controller
err = alpha_cmd - alpha_act
# Anti-windup for integral
if abs(self.delta) < self.max_deflection:
self.integral_err += err * dt
d_err = (err - self.prev_err) / dt if dt > 1e-6 else 0.0
self.prev_err = err
# Commanded deflection (before servo dynamics)
delta_cmd = self.Kp * err + self.Ki * self.integral_err + self.Kd * d_err
# 2. Servo Dynamics (2nd Order)
# d(d_delta)/dt = delta_dot
# d(d_delta_dot)/dt = wn^2 * (cmd - delta) - 2*zeta*wn*delta_dot
delta_ddot = (self.wn**2) * (delta_cmd - self.delta) - 2 * self.zeta * self.wn * self.delta_dot
# Euler integration for servo state within the main loop
self.delta_dot += delta_ddot * dt
self.delta += self.delta_dot * dt
# Apply Saturation
self.delta = np.clip(self.delta, -self.max_deflection, self.max_deflection)
return self.delta
# ----------------------------------------------------------------------------
# 2. Missile Dynamics with Autopilot (6-DOF)
# ----------------------------------------------------------------------------
class Missile6DOFAuto:
def __init__(self, config, aero_db, autopilot):
self.cfg = config
self.aero = aero_db
self.ap = autopilot
# State: [x,y,z, vx,vy,vz, qw,qx,qy,qz, p,q,r]
self.state = np.zeros(13)
self.state[6] = 1.0 # Quaternion identity
self.I = np.diag([config['Ixx'], config['Iyy'], config['Izz']])
self.I_inv = np.linalg.inv(self.I)
def set_initial_state(self, pos, vel, quat, omega):
self.state[0:3] = pos
self.state[3:6] = vel
self.state[6:10] = QuatTools.normalize(quat)
self.state[10:13] = omega
def dynamics(self, t, state):
x, y, z = state[0:3]
vx, vy, vz = state[3:6]
q = state[6:10]
omega = state[10:13]
# 1. Environment & Velocity
# Simplified atmosphere
rho = 1.225 * np.exp(-y / 8500.0)
temp = 288.15 - 0.0065 * y
v_body = QuatTools.rotate_to_body(q, np.array([vx, vy, vz]))
u, v, w = v_body
V = np.linalg.norm(v_body)
if V < 1e-3: V = 1e-3
# 2. Aerodynamics
alpha = np.arctan2(w, u)
beta = np.arcsin(np.clip(v / V, -1, 1))
mach = V / np.sqrt(1.4 * 287.05 * temp)
# Dummy Aero Coeffs (or use AeroDB if available)
CL0 = 2 * np.pi * alpha
CD = 0.015 + 0.05 * CL0**2
Cm0 = -1.5 * alpha
# 3. Autopilot Command
# Let's simulate a "Pull Up" maneuver: Command 10 deg alpha
alpha_cmd = np.deg2rad(10.0)
# We need dt for the autopilot. Since solve_ivp is adaptive,
# we use a fixed internal step approximation or store prev time.
# For simplicity in this demo, assume dt=0.01 for PID update
dt_ap = 0.01
delta_e = self.ap.update(alpha_cmd, alpha, dt_ap)
# 4. Control Effectiveness
CL_delta = 0.1 * delta_e
Cm_delta = -0.5 * delta_e
CL = CL0 + CL_delta
Cm = Cm0 + Cm_delta
Q = 0.5 * rho * V**2
S = self.cfg['S_ref']
c_ref = self.cfg['c_ref']
# Forces in Body Frame
F_lift = -Q * S * CL # Lift acts in -Z body for +alpha
F_drag = -Q * S * CD * (v_body / V)
F_thrust = np.array([self.cfg['thrust'], 0, 0])
forces_body = F_thrust + F_drag + np.array([0, 0, F_lift])
# Moments in Body Frame
M_pitch = Q * S * c_ref * Cm
moments_body = np.array([0.0, M_pitch, 0.0])
# 5. Translational & Rotational Dynamics
forces_inertial = QuatTools.rotate_to_inertial(q, forces_body)
gravity = np.array([0, -self.cfg['mass'] * 9.81, 0])
accel = (forces_inertial + gravity) / self.cfg['mass']
I_omega = self.I @ omega
gyro = np.cross(omega, I_omega)
domegap = self.I_inv @ (moments_body - gyro)
dq = QuatTools.derivative(q, omega)
return [vx, vy, vz, accel[0], accel[1], accel[2],
dq[0], dq[1], dq[2], dq[3],
domegap[0], domegap[1], domegap[2]]
# ----------------------------------------------------------------------------
# 3. Simulation Runner
# ----------------------------------------------------------------------------
def main():
CONFIG = {
'mass': 50.0, 'thrust': 800.0, 'S_ref': 0.03, 'c_ref': 0.5,
'Ixx': 2.0, 'Iyy': 50.0, 'Izz': 50.0
}
# Init Autopilot & Missile
ap = Autopilot(CONFIG)
missile = Missile6DOFAuto(CONFIG, None, ap) # Passing None for aero_db as we use dummy coeffs
# Initial State
init_pos = np.array([0.0, 1000.0, 0.0]) # 1km alt
init_vel = np.array([300.0, 0.0, 0.0]) # 300 m/s
init_quat = QuatTools.euler_to_quat(0, np.deg2rad(5.0), 0) # 5 deg pitch
init_omega = np.array([0.0, 0.0, 0.0])
missile.set_initial_state(init_pos, init_vel, init_quat, init_omega)
print("Starting 6-DOF Simulation with Autopilot...")
start = time.perf_counter()
# Run Solver
# Note: Passing dt=0.01 to autopilot inside dynamics is a hack for demo.
# Real implementation would use a discrete event or separate logging.
sol = solve_ivp(
missile.dynamics,
[0, 15.0],
missile.state,
method='DOP853',
max_step=0.01,
rtol=1e-9
)
end = time.perf_counter()
print(f"Simulation finished in {end-start:.3f}s. Status: {sol.status}")
# --- Visualization ---
fig, axes = plt.subplots(2, 2, figsize=(14, 10))
# 1. Trajectory
axes[0,0].plot(sol.y[0], sol.y[1], linewidth=2)
axes[0,0].set_title("Trajectory (Range vs Alt)")
axes[0,0].set_xlabel("Range (m)"); axes[0,0].set_ylabel("Alt (m)")
axes[0,0].grid(True)
# 2. Alpha Tracking
alphas = []
for i in range(len(sol.t)):
q = sol.y[6:10, i]
v = sol.y[3:6, i]
vb = QuatTools.rotate_to_body(q, v)
alpha = np.rad2deg(np.arctan2(vb[2], vb[0]))
alphas.append(alpha)
axes[0,1].plot(sol.t, alphas, color='green')
axes[0,1].axhline(y=10, color='r', linestyle='--', label='Cmd 10°')
axes[0,1].set_title("Alpha Tracking (Deg)")
axes[0,1].set_xlabel("Time (s)"); axes[0,1].set_ylabel("Alpha")
axes[0,1].grid(True); axes[0,1].legend()
# 3. Altitude
axes[1,0].plot(sol.t, sol.y[1], color='blue')
axes[1,0].set_title("Altitude Profile")
axes[1,0].set_xlabel("Time"); axes[1,0].set_ylabel("Alt")
axes[1,0].grid(True)
# 4. Pitch Rate
axes[1,1].plot(sol.t, sol.y[11], color='purple') # q is index 11
axes[1,1].set_title("Pitch Rate (q)")
axes[1,1].set_xlabel("Time"); axes[1,1].set_ylabel("rad/s")
axes[1,1].grid(True)
plt.tight_layout()
plt.show()
if __name__ == "__main__":
main()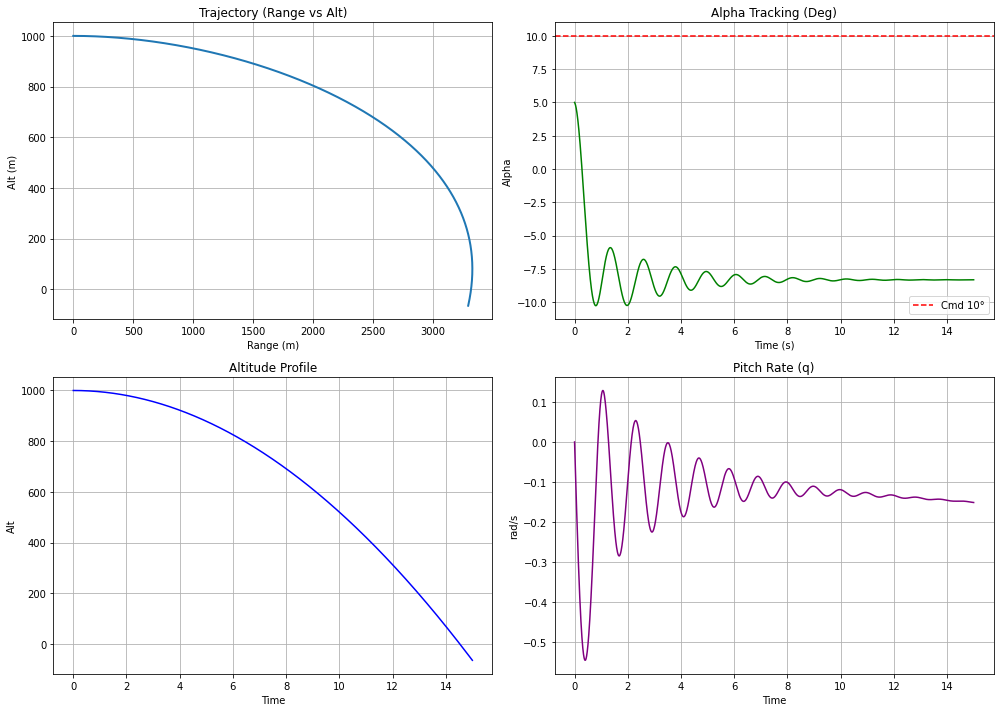
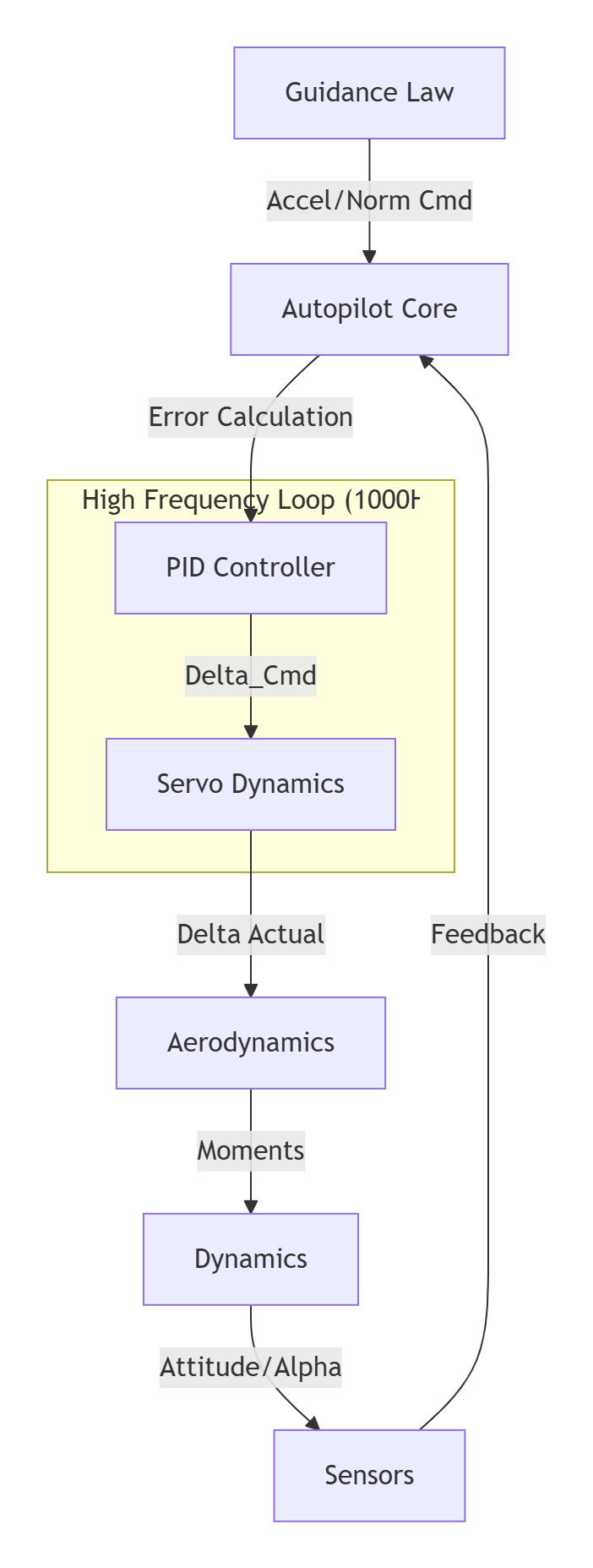
控制流程:
自动驾驶仪形成了一个内部闭环,运行频率通常高于制导律。
效果演示:
运行上述代码,你将看到:
-
Alpha跟踪曲线:导弹尝试将攻角维持在10度。你会看到曲线从初始的5度上升到10度,但由于舵机延迟和惯性,可能会有轻微的超调或振荡。
-
轨迹变化:由于产生了升力,导弹不再直线飞行,而是开始爬升或改变航向。
-
稳定性测试 :如果将
Kp调得非常大(例如 50.0),你会看到攻角曲线剧烈震荡,最终导致仿真发散(不稳定)。
问题总结分析与提高:
- 控制分配(Control Allocation):本篇只处理了俯仰通道(Elevator)。真实的导弹有四个舵面。当同时需要俯仰和偏航控制时,需要解算:
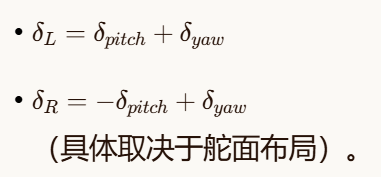
-
三回路自动驾驶仪(Three-Loop Autopilot):现代导弹常用"过载-角速率-角加速度"三回路结构,比简单的PID更稳定,抗扰动能力更强。
-
参数整定(Tuning) :PID参数(Kp,Ki,Kd)通常通过观察**阶跃响应(Step Response)**来调整。可以使用Ziegler-Nichols方法或遗传算法进行优化。
4. 状态记录 :为了分析性能,建议在 dynamics函数中记录舵偏角 δ和攻角 α,而不是仅仅依靠事后计算。
结语:
本篇构建了导弹的"小脑"。至此,我们已经打通了从"目标探测"到"舵面偏转"的全链路。在下一篇文章中,我们将引入PyVista,将枯燥的数字转化为震撼的3D可视化战场,实现"所见即所得"的仿真体验。