具身智能机器人概念与系统
1. 理解人形机器人
人形机器人是一种模仿人类外形与行为特征的智能机器人,具备类似人类的身体结构,能够执行类人的动作任务,可以与人类交互且具备自我学习和环境适应能力。
2. 国内/外具身机器人
- Tesla(Optimus)
- Figure AI
- Boston Dynamic
- 优必选
- 宇树
- 智元
- 众擎
- 银河通用
- 傅里叶智能
3. 系统组成分析
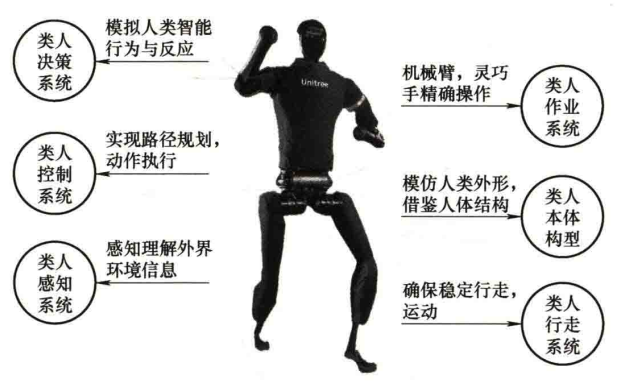
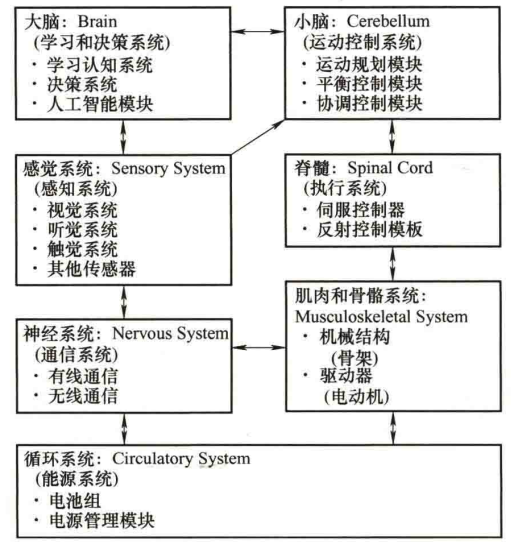
具身智能机器人可从功能结构、物理结构、仿生结构三个层面分别分析。
-
功能结构 :包括类人体构型、类人决策系统、类人控制系统、类人感知系统、类人行走系统、类人作业系统。
-
物理结构:包括机器人本体架构、动力传动系统、功能系统、通信系统、控制操作系统和软件系统。
-
仿生结构:可划分为大脑、小脑、脊髓、感觉系统、肌肉和骨骼系统、神经系统。
4. 具身智能关键技术
- 行走及平衡控制技术
- 学习与控制技术
- 导航与运动规划技术
- 环境感知技术
- 机构设计技术
- 人机交互技术
- 大模型与具身智能
大模型 :数据驱动的通用认知引擎。
具身智能:环境驱动的物理交互交互智能体。
大模型 是当前人工智能技术的核心基座,它赋予了 AI 强大的认知和理解能力;生成式 AI 是大模型最重要的应用方向之一,让 AI 具备了创造数字内容的能力;具身智能则是人工智能发展的下一个重大里程碑,它将大模型的 "大脑" 与机器人的 "身体" 结合起来,让 AI 能够真正走进现实世界,成为人类的物理助手。
5. 应用领域与前景
具身智能机器人可独立执行任务,并代替人类完成复杂任务,目前已被应用与各个领域:工业制造领域、家庭服务领域、军事领域、航空航天领域、物流运输领域,可在简单到复杂场景下提高生产率,降低工作场所事故发生的风险。
- 多模态大模型与人形机器人融合(VLA、认知与交互场景)
- 具身智能与人形机器人融合(侧重医疗、服务、救援等特种场景)
- 非结构化认知识别与运动控制(侧重导航、规划控制)
- "感""觉"系统(感知系统)
- 强感知能力的触觉灵巧手(触觉系统)
- 轻量化材料和结构设计优化(新型材料提升机器人的基础性能)