第 1 章 引言
在汽车电子控制单元(ECU)的研发过程中,工程师常常需要实时查看某个内部变量的变化曲线,或者在线调整一套控制参数而不必重新烧写程序。这些看似基础的需求,背后需要一套标准化的通信协议来支撑------这就是 XCP 协议的使命。
XCP(Universal Measurement and Calibration Protocol,通用测量与标定协议)由 ASAM(自动化与测量系统标准化协会)制定,目前已被广泛应用于汽车电子开发工具链(如 Vector CANape、ETAS INCA)与 ECU 之间的交互。在 AUTOSAR CP(Classic Platform)架构中,XCP 更是作为基础软件(BSW)的通信服务模块之一,承担着在线调试、参数标定与数据采集的核心角色。
本文是 AUTOSAR CP XCP 协议栈核心解析 的理论篇,旨在帮助读者建立对 XCP 协议的系统性认知。我们将从 XCP 的历史演进讲起,逐步深入到其核心概念、总体架构、功能模块设计与业务流程,最后总结其在 AUTOSAR CP 中的优势与局限。
第 2 章 XCP 协议概述与 AUTOSAR CP 中的定位
2.1 XCP 协议的历史演进:从 CCP 到 XCP
在 XCP 出现之前,汽车标定领域的主流协议是 CCP(CAN Calibration Protocol)。CCP 专门为 CAN 总线设计,在当时解决了标定工具与 ECU 之间基本的数据读写和采集问题。然而,随着汽车电子系统的复杂度提升和新总线技术(如 FlexRay、以太网)的引入,CCP 的局限性逐渐暴露:
-
传输层绑定:CCP 与 CAN 强耦合,无法直接移植到其他物理层。
-
DAQ 配置固化:数据采集列表在编译时确定,不够灵活。
-
功能扩展困难:时间戳、安全解锁、闪存编程等新需求难以优雅集成。
XCP 正是作为 CCP 的"通用化升级版"而诞生。它保留了 CCP 的核心交互模式(主从、命令响应),但将应用层协议与传输层彻底解耦。因此,XCP 可以运行在 CAN、CAN FD、FlexRay、以太网、USB 甚至 SPI 上,同时增强了 DAQ 的灵活性、引入了安全机制和更丰富的功能。
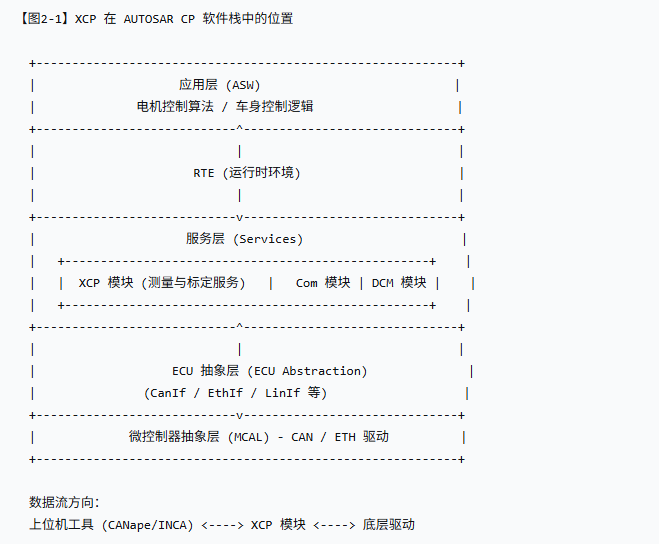
2.2 XCP 在 AUTOSAR CP 基础软件栈中的层次位置
在 AUTOSAR CP 架构中,XCP 模块位于服务层的通信服务部分。下图展示了其在软件栈中的位置:
2.3 XCP 与 CCP 的核心差异对比
下表总结了 XCP 相对于 CCP 的主要改进:
| 维度 | CCP | XCP |
|---|---|---|
| 传输层 | 仅 CAN | 解耦,支持多种物理层 (CAN/FlexRay/Eth) |
| DAQ 配置 | 静态 ODT 预配置 | 支持静态与动态分配 (ALLOC_* 命令) |
| DTO 识别 | 依赖 PID 偏移 | 支持绝对/相对字节等多种识别模式 |
| 时间戳 | 无 | 可选 (1/2/4 字节) |
| 安全解锁 | 不支持 | 标准 Seed & Key 机制 |
| 同步采集 | 基本同步 | 支持预分频器、同步启动/停止 |
| 闪存编程 | 非标准扩展 | 标准 PGM 命令集 |
第 3 章 XCP 核心概念详解
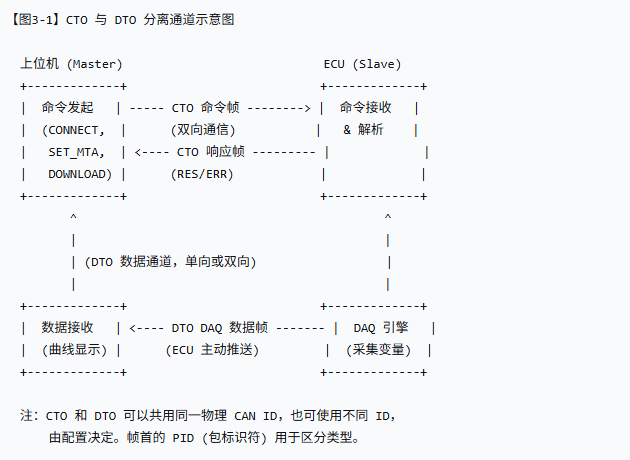
3.1 CTO 与 DTO:命令通道与数据通道的分离
XCP 协议将通信对象分为两类:CTO(命令传输对象)和 DTO(数据传输对象)。CTO 用于主从之间的命令-应答交互,DTO 用于 ECU 向上位机主动推送测量数据。下图展示了二者的分离关系:
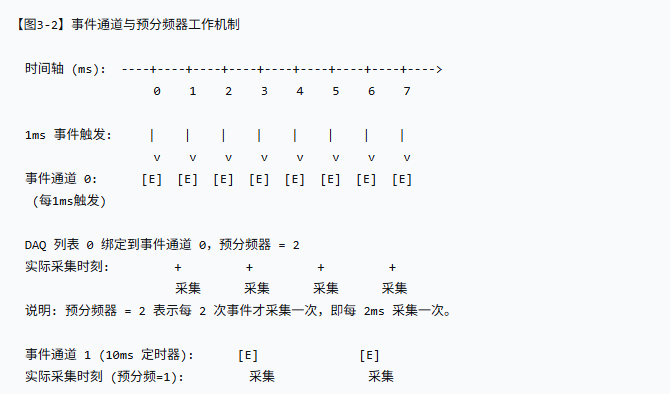
3.2 事件通道:DAQ 采集的触发源
DAQ 采集需要与 ECU 内部的实时任务同步。XCP 引入事件通道(Event Channel)概念,每个事件通道对应一个触发源(如定时器中断、角度同步等)。每个 DAQ 列表可绑定到一个事件通道,并可设置预分频器。下图展示了事件通道与预分频器的工作机制:
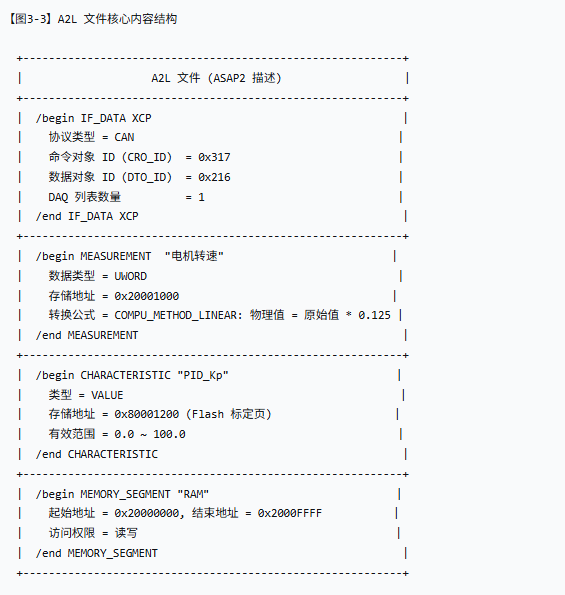
3.3 A2L 文件:上位机的"数据字典"
A2L 文件是 XCP 通信中不可或缺的"数据字典",它描述了 ECU 内部所有可观测和可标定的变量信息。上位机工具加载 A2L 文件后,就知道变量的地址、类型、转换关系以及通信参数。下图展示了 A2L 文件的核心内容结构:
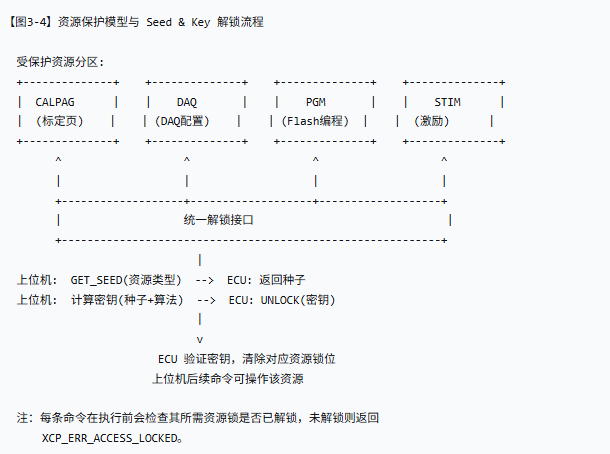
3.4 资源保护模型:标定页、DAQ、编程与激励分区
XCP 将 ECU 的资源划分为多个保护区,每个区可以独立加锁。解锁采用 Seed & Key 机制。下图展示了资源保护模型:
第 4 章 XCP 协议栈总体架构
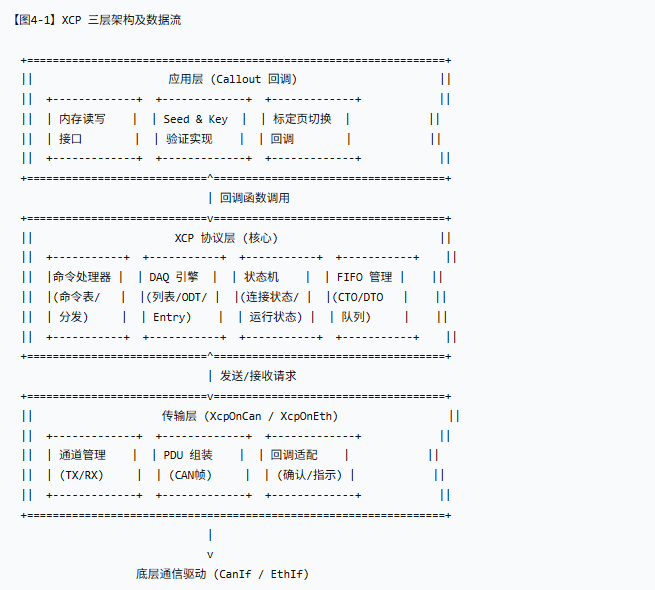
4.1 协议层、传输层与应用层的解耦设计
XCP 协议栈在逻辑上分为三层:协议层(命令处理与 DAQ 调度)、传输层(适配 CAN/以太网等)以及应用层回调(内存访问、安全校验)。下图展示了这三层架构及数据流:
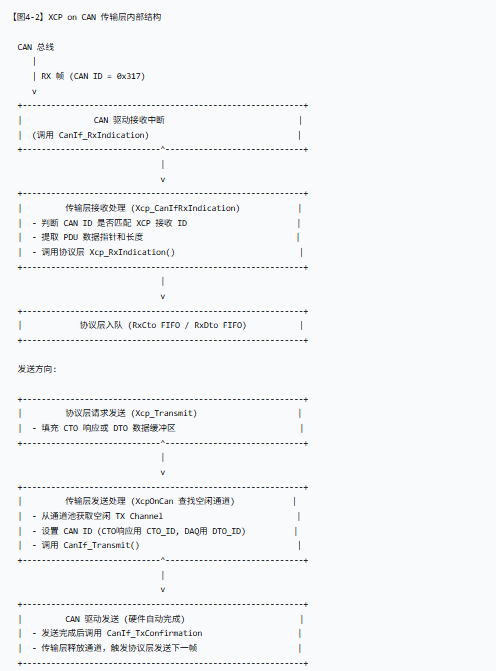
4.2 传输抽象机制:XCP on CAN 的典型实现
以 XCP on CAN 为例,传输层需要完成接收侧和发送侧的适配。下图展示了 XCP on CAN 传输层的内部模块与数据流:
4.3 与底层通信驱动的交互方式
XCP 模块通过标准回调接口与底层通信驱动交互,不直接操作硬件。下图展示了交互接口:

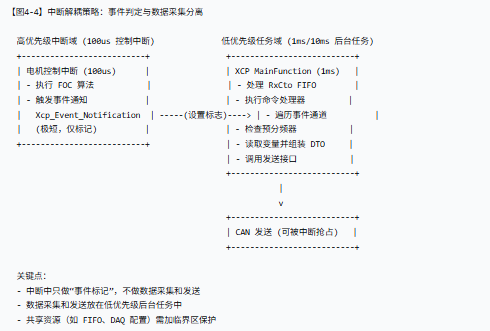
4.4 在实时控制系统中的中断解耦策略
在电机控制等强实时系统中,DAQ 采集不能阻塞控制环路。典型的策略是将事件判定与数据处理分离。下图展示了这种解耦设计:
第 5 章 核心功能模块设计
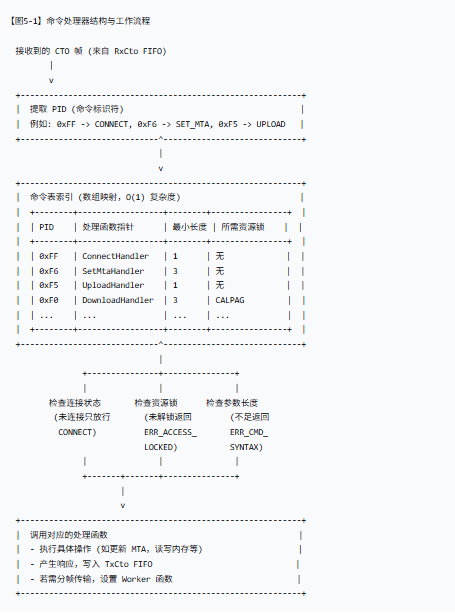
5.1 命令处理器
命令处理器是 XCP 协议层的"中枢神经"。它维护一张命令表,根据收到的命令标识快速分发到对应的处理函数。下图展示了命令处理器的内部结构:
5.2 DAQ 引擎
DAQ 引擎是 XCP 实现高速数据采集的核心。它采用三级数据结构:DAQ 列表 → ODT → ODT Entry。下图展示了数据结构及采集调度流程:
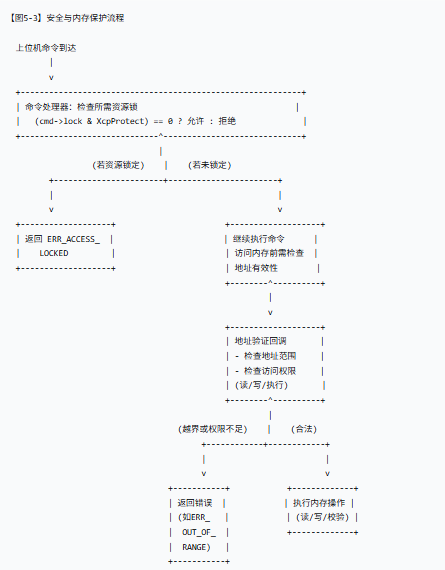
5.3 安全与内存保护
XCP 通过资源锁和地址验证实现安全保护。下图展示了安全与内存保护机制:
5.4 整体状态机设计
XCP 维护多个正交的状态维度。下图展示了关键的状态机:

第 6 章 核心业务流程
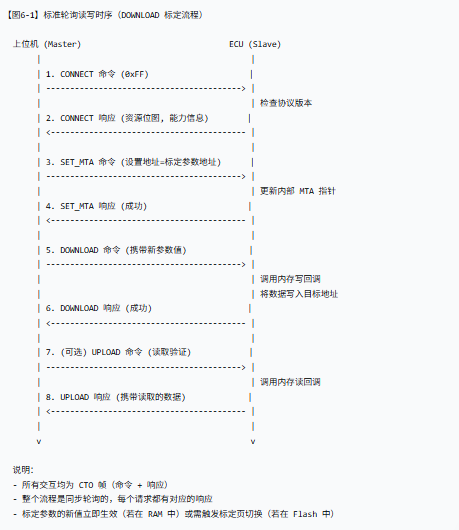
6.1 标准轮询读写流程(以上位机下发标定值为例)
下图展示了上位机通过 XCP 在线修改一个标定参数的完整时序:
6.2 高速 DAQ 采集全生命周期
阶段一:DAQ 列表配置
上位机首先发送 CLEAR_DAQ_LIST 清除旧的 Entry。然后通过 SET_DAQ_PTR 设置当前写入位置(如指向 DAQ 列表 0 的 ODT 0 的 Entry 0)。接着循环发送 WRITE_DAQ,每帧写入一个变量的地址、长度和扩展信息。ECU 自动推进指针,直到所有 Entry 配置完毕。最后发送 SET_DAQ_LIST_MODE 将该 DAQ 列表绑定到事件通道并设置预分频器。可选择发送 START_STOP_DAQ_LIST 或 START_STOP_SYNCH 启动采集。
阶段二:事件触发
ECU 内部某个周期性任务(例如每 1ms 的定时器中断)达到时,会调用 XCP 的事件通知函数,并传递事件通道编号。XCP 协议层记录该事件发生,但不立即进行数据组装(避免中断过长)。
阶段三:DTO 数据组装与发送
在主循环的低优先级任务中,XCP 主函数周期性地检查各个事件通道是否有挂起的事件。对于每个挂起的事件,遍历绑定到该通道的 DAQ 列表。对于每个正在运行的列表,检查预分频计数器;若满足触发条件,则按顺序读取每个 Entry 指向的变量值,填充到 DTO 缓冲区中。一个 ODT 可能产生多个 DTO 帧(如果数据量超过单帧载荷)。这些 DTO 帧通过发送请求函数排队送出,并在每个帧发送完成后由确认回调触发下一帧。
阶段四:停止采集
上位机发送 START_STOP_DAQ_LIST 命令,清除对应列表的运行标志。下一次主函数处理事件时,该列表将被跳过。
第 7 章 接口设计与集成视角
7.1 初始化与主调度接口
XCP 模块需要提供两个关键的调度接口:
-
初始化函数:在系统启动时调用一次,用于清零内部状态机、配置传输层、预分配 FIFO 队列、绑定事件通道与 DAQ 列表的静态关系。
-
主函数:需要在后台循环中周期性调用(例如每 1ms 或每 10ms)。该函数负责处理接收到的 CTO 命令、驱动分帧传输的工作进程、以及触发 DAQ 的 DTO 发送。它不应当被中断服务程序直接调用,而应放在任务级。
7.2 传输层回调接口
为了让 XCP 与底层通信驱动集成,需要实现以下回调(由底层调用):
-
接收指示回调:底层驱动收到一帧数据后,调用该回调,传递缓冲区和长度。XCP 内部判断是 CTO 还是 DTO,并存入对应 FIFO。
-
发送确认回调:底层成功发送一帧后调用。XCP 借此释放发送通道资源,并继续发送队列中的下一帧(若有)。
7.3 事件触发与 DAQ 调度接口
为了将 ECU 内部的事件(如定时器中断、角度同步)传递给 XCP,需要提供一个简单的事件通知函数。该函数接受一个事件通道编号作为参数。它应当极短,通常仅设置一个标志位或将事件加入一个轻量级队列,而将实际的数据采集延迟到主函数中处理。
7.4 内存访问与配置接口
XCP 协议层对内存的读写操作通过一组可配置的回调函数实现。这些回调包括:
-
读内存:从指定地址读取指定长度的数据。
-
写内存:向指定地址写入指定长度的数据。
-
地址校验:判断地址是否属于允许访问的段,并返回访问权限(读/写/执行)。
-
校验和计算:对一块内存区域计算累加和或 CRC。
这些回调由应用层根据具体硬件实现,XCP 协议层只负责调用。
第 8 章 总结与展望
8.1 XCP 协议在 AUTOSAR CP 中的优势总结
XCP 协议凭借其传输层解耦、灵活的 DAQ 机制、完善的安全模型,已成为汽车电子标定领域的事实标准。在 AUTOSAR CP 架构中集成 XCP,可以带来以下优势:
-
工具链标准化:任何支持 XCP 的上位机(如 CANape、INCA)都可以连接符合 AUTOSAR XCP 规范的 ECU,无需定制接口。
-
低侵入采集:通过事件通道与后台调度分离,DAQ 对实时控制任务的干扰极小。
-
资源可配置:通过静态或动态 DAQ 配置,可以在内存占用和灵活性之间做出权衡,适应不同等级的 MCU。
-
扩展性强:得益于回调接口设计,移植到不同硬件或通信介质只需修改底层适配,协议核心保持不变。
8.2 当前设计的局限与未来演进方向
尽管 XCP 已经非常成熟,但随着汽车电子架构向域集中和车载以太网演进,它仍有一些局限:
-
CAN 总线吞吐量:在经典 CAN(500kbps)上,即使使用 XCP,DAQ 的有效数据速率仍然有限(约 10-30 KB/s),难以满足高阶自动驾驶对海量数据记录的需求。
-
时间同步精度:XCP 的时间戳基于 ECU 本地时钟,多个 ECU 之间的采集数据难以精确对齐(需要全局时间同步机制,如 PTP)。
-
动态 DAQ 的实时性:动态分配 DAQ 资源涉及内存管理,在实时性要求极高的系统中可能引入不确定性。
未来演进方向包括:
-
XCP over CAN FD / Ethernet:利用更高的带宽和更大的帧长,显著提升 DAQ 吞吐量。
-
与 SOME/IP 集成:在某些应用中,XCP 可以通过 SOME/IP 进行隧道传输,便于远程标定。
-
改进同步机制:结合 IEEE 802.1AS 或 AUTOSAR 的全局时间模块,实现多 ECU 数据的时间戳同步。
总之,XCP 协议在可预见的未来仍将是测量与标定的核心选择,而 AUTOSAR CP 为其提供了一个稳健且标准化的实现框架。