这篇文章会比较长,我建议你先收藏,找个不被打扰的时间慢慢读。

今天,我想换一个笨办法:不聊虚的,只做一件事------从零实现一帧CAN报文的发送和接收。
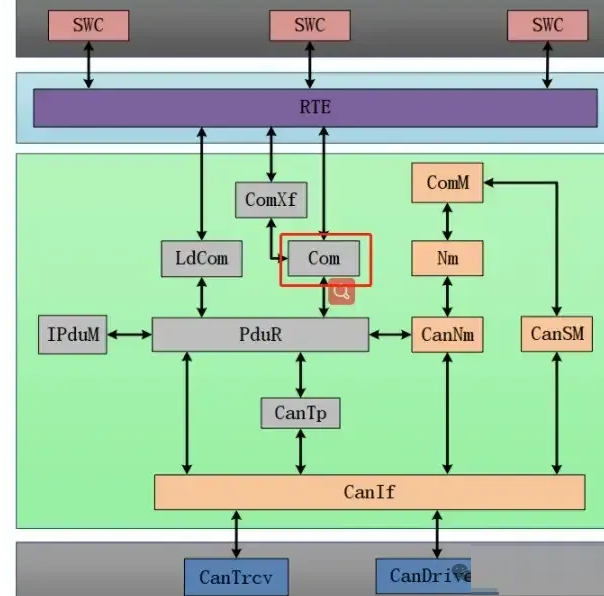
通过这一帧报文,你会亲手摸到AUTOSAR的核心骨架:从RTE到Com,从PduR到CanIf,再到Can模块。如果想获取实战项目,可佳:AutoButo**,** 你会看到抽象的概念如何落地成真实的数据流。你会在实战中建立体系性的认知,而不是背一堆永远用不上的术语。
1:车软AUTOSAR为什么难学
市面上但凡提到AUTOSAR,铺天盖地全是规范。经典的那几本------Communication Stack、Diagnostic Stack、Memory Stack------随便一本都是几百页起步。网上的教程、公众号的文章,翻来覆去也是这些:解释模块、解释接口、解释配置参数。
你看了一圈,感觉自己懂了。RTE是运行环境,Com模块负责信号打包,PduR负责路由......概念背得滚瓜烂熟。
但真给你一个工程,让你配一帧CAN报文发出来。你懵了。
因为没有人告诉你:这些规范里的概念,到底对应Davinci里的哪个配置项?代码生成之后,从哪里开始写逻辑?
这就是问题所在:规范太多,项目太少。
2:考试型工程师

工作几年了,你会发现团队里总有那么一类人。学历漂亮,简历亮眼,毕业就进了头部外企。开会讨论方案,他们张口闭口"根据AUTOSAR规范4.3.2章节","这里不符合ISO 26262的某某条款"。你问他某个配置项怎么调,他不跟你说他上次调通的经验,而是翻开几百页的PDF,找到那一段,念给你听。
你要是追问一句:"那你实际跑过吗?有没有踩过什么坑?"
他愣一下,然后说:"规范上是这么写的,应该没问题吧。"
我管这种叫"考试工程师"。
他们能把AUTOSAR、ASPICE、功能安全的标准倒背如流,但你真给一块开发板、一个Davinci工程,让他配一帧最简单的CAN报文发出来,他看着满屏的配置界面,鼠标点了一圈,最后问你:"这个CanId,到底填0x123还是291?"
你说他不懂吧,他概念门儿清。你说他懂吧,他从来没让代码真正跑在芯片上过。
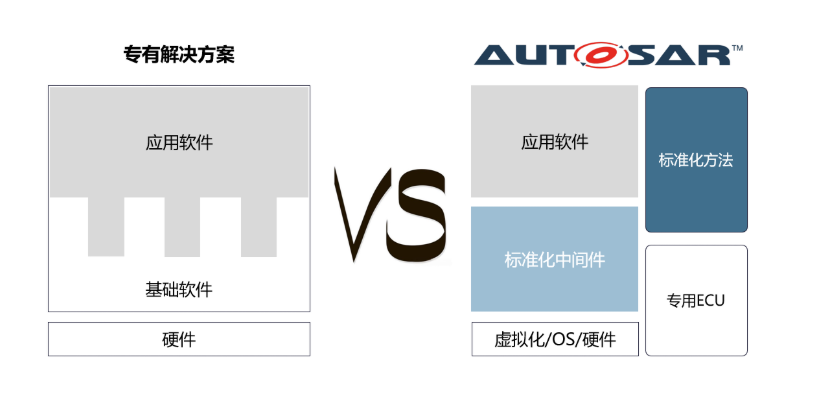
AUTOSAR这个东西,本来就是从欧洲汽车行业长出来的。外企的基因是什么?是文档驱动、流程驱动。几百上千页的规范,几十个模块,几千个配置项------这套体系本身没问题,它精密、严谨、可追溯。但问题在于,当这套东西落到一群"考试工程师"手里,味道就变了。
大家开始比谁规范读得细,谁能在评审会上引经据典驳倒对方,谁写的设计文档页码多。至于代码跑不跑得通,板子上的灯亮不亮,反倒成了次要的事。
很多新人就是这样被带进沟里的。他们花了半年啃规范,把Communication Stack从RTE到Can的每一层关系背得滚瓜烂熟,把Signal、Pdu、Frame的区别写在小本子上。结果进了项目,连一个周期发送的CAN信号都配不出来,不知道该从哪一层开始配。
这不是在学工程,这是在背词典。
所以我想跟你说的是------下面的内容,咱们不背书。不聊那些你翻规范也能看到的定义。咱们就干一件事:
让一帧CAN报文,从你的板子上实实在在地发出去。

3:AUTOSAR规范到底怎么读

在动手之前,有必要先跟你聊聊AUTOSAR这套规范文档到底该怎么用。因为这直接关系到你是"越学越清醒"还是"越学越懵"。
AUTOSAR这套规范,天生就不是写给新手看的。几千页的PDF,上来就给你拆成几十个模块,每个模块又有几百个配置参数。它告诉你每个参数叫什么、属于哪个结构体,但就是不告诉你------你想发一帧CAN报文,到底要配哪几个?配成什么样?
更离谱的是,你翻完整个Communication Stack,连一个完整的配置示例都找不到。全是孤立的参数定义,没有上下文,没有"从零到一"的串联。这就好比教你造车,但不给你图纸,只给你一本《汽车零件百科全书》。你背熟了所有零件名字,还是造不出一辆车。
AUTOSAR官方文档:你只需要知道这几份
打开AUTOSAR官网,文档列表能吓退一半的人。我帮你拆解一下,你只需要关注这几类:

- SWS(Software Specification):软件规范。你的主战场。每个模块(Com、PduR、CanIf、Can)的功能、API、配置参数都在这里。
- EXP(Explanation):说明文档。对某些概念的补充解释,比SWS好读一些。
- TR(Technical Report):技术报告。背景知识、缩写含义、方法论,适合扫盲。
至于SRS、TPS、RS------做应用开发的话,暂时不用碰。
想开发CAN通信,先从SWS的这几页看起
你不用从头读到尾,那是浪费时间。直接翻到这几个位置:
1. 整体交互流程看哪里?
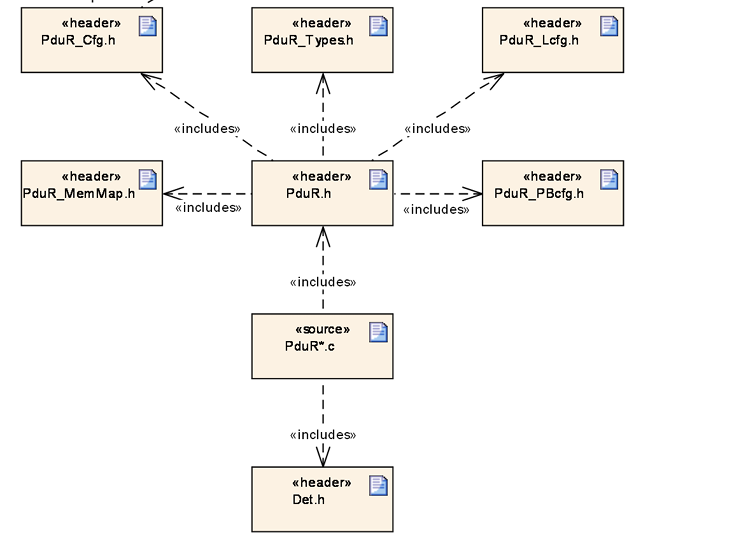
- SWS_PduR 第7章(Functional Specification) 和第8章(Sequence Diagrams)
- 重点关注:PduR路由表的逻辑,以及从Com到CanIf的时序图
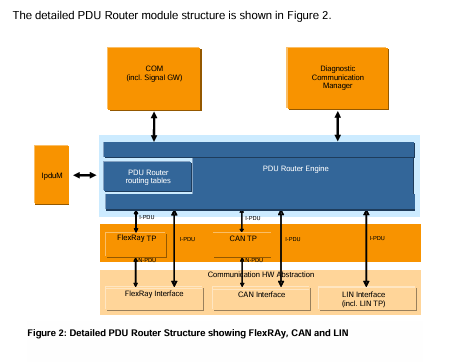
- SWS_Com 第7.2章(Signal to I-PDU mapping)
- 重点关注:多个Signal如何打包成一个I-PDU
- SWS_CanIf 第7章(Functional Specification)和第8.2章(Transmit/Receive sequence)
- 重点关注:HOH(硬件对象句柄)的概念,以及CanIf如何调用Can驱动
把这些时序图拼在一起,你就得到了完整的收发流程。
2. 模块功能介绍看哪里?
每个SWS的第1章(Introduction and functional overview),花10分钟扫一遍就够了。不需要背,知道这个模块是干什么的就行。
3. 配置参数看哪里?
每个SWS的第4章(Configuration)。这里会列出所有配置容器的名称、类型、取值范围。你配工具(比如Davinci、EB)的时候,翻到这里对着配。
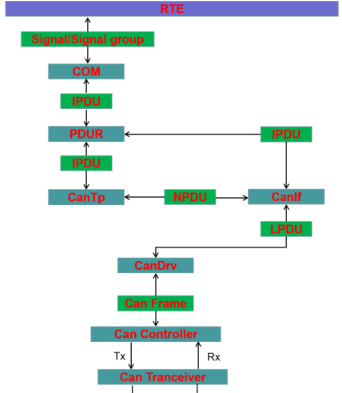
简单汇总一下CAN通信的核心流程
发送方向(应用→总线):
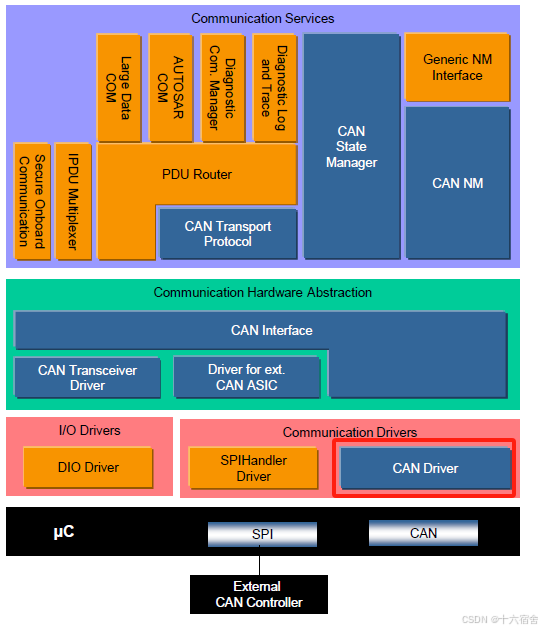
SWC调用RTE接口 → Com模块打包Signal为I-PDU → PduR路由 → CanIf映射到硬件单元 → Can驱动写寄存器 → 总线发出
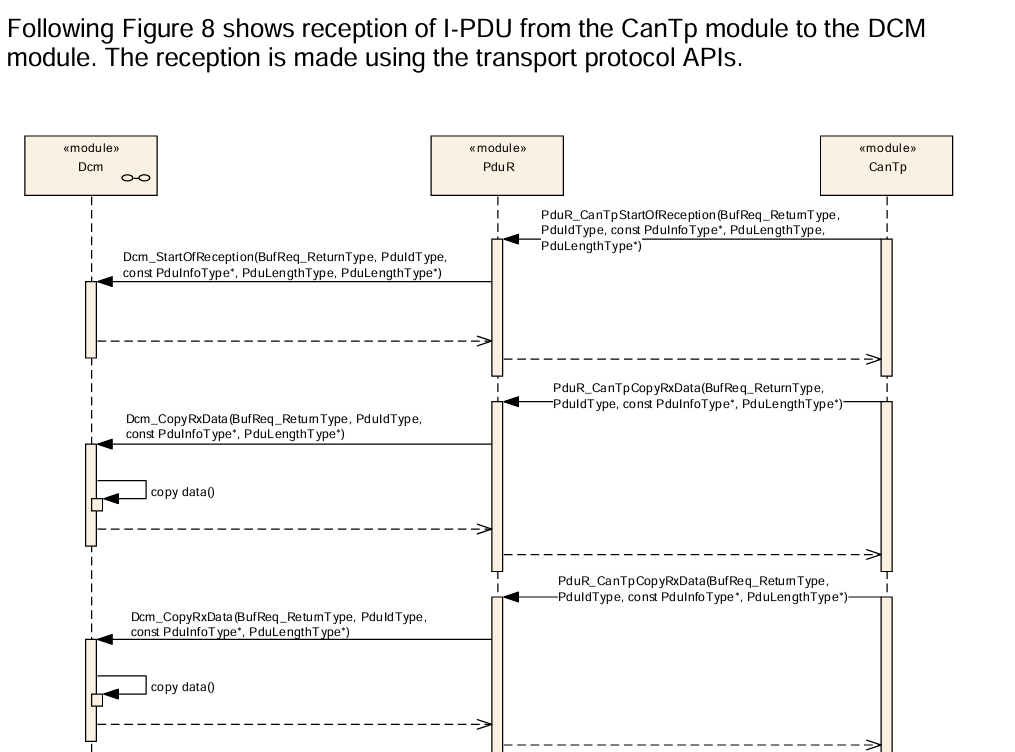
接收方向(总线→应用):
Can驱动接收中断 → CanIf回调 → PduR路由 → Com解包为Signal → RTE通知SWC
这个流程在SWS_PduR的时序图(第8章) 里画得最清楚。
规范到实战:最后一句话总结
规范告诉你"有什么",实战告诉你"怎么用"。规范的每一页都在定义"这个东西叫什么、能做什么",但只有你亲手配过一次、跑通一次,才会知道"原来这个参数不配置默认值会踩坑"、"原来这两个容器的依赖关系规范里只提了一句,但实际缺一不可"。规范是字典,实战是写作文------字典背得再熟,不动笔永远写不出文章。
4:can通信基础
在基本摸清AUTOSAR规范的门路之后,我们终于可以动手了。但动手之前,得先把CAN通信本身这摊事聊清楚。因为后面你在AUTOSAR里配的那一堆参数,本质都是在回答CAN通信提出的问题。
CAN通信是什么?
CAN(Controller Area Network)最早是 Bosch 在 1980 年代为了解决车上线束太多、信号不可靠的问题而发明的。你可以把它理解成车上的"内部广播系统"------任何一个节点发出一条消息,总线上所有其他节点都能听到,但只有"听得懂"的那个节点才会去处理。
CAN通信的物理层用的是两根线:CAN_H和CAN_L。这两根线之间的差分信号决定了逻辑0和逻辑1。隐性电平(逻辑1) 两根线电压差接近0,显性电平(逻辑0) 两根线电压差在2V左右。为什么叫"显性"和"隐性"?因为只要有一个节点把总线拉成显性,整条总线就是显性------这就是CAN总线的仲裁机制的基础。
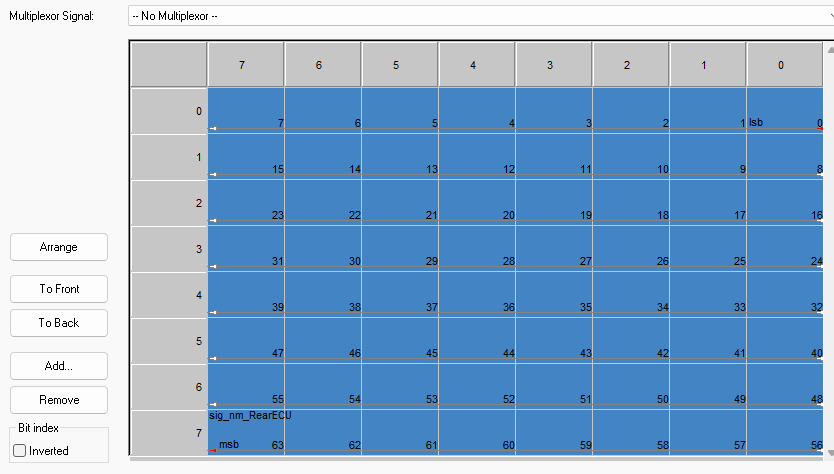
CAN报文的硬件编码结构
一帧标准CAN报文(11位ID),从硬件层面看,大致长这样:
- SOF(Start of Frame):1位,显性电平,告诉所有节点"我要开始发消息了"
- Identifier:11位,也就是我们常说的CAN ID。ID越小,优先级越高------因为仲裁时前面显性位越多,ID就"赢"了
- RTR(Remote Transmission Request):1位,区分是数据帧还是远程帧,我们只关心数据帧
- Control Field:6位,其中4位是DLC(Data Length Code),告诉你后面跟着几个字节的有效数据(0到8)
- Data Field:0到64位,最多8个字节,这就是你真正要传的数据
- CRC Field:15位校验加1位定界符,用来保证数据没错
- ACK Field:2位,接收节点收到后拉低ACK槽,告诉发送者"我收到了"
- EOF(End of Frame):7位隐性电平,收工
你看完这段可能会问:我配置AUTOSAR的时候需要管SOF、CRC、ACK吗?不需要。这些都是CAN控制器硬件自动完成的。你只需要配置三样东西:CAN ID、DLC、Data。
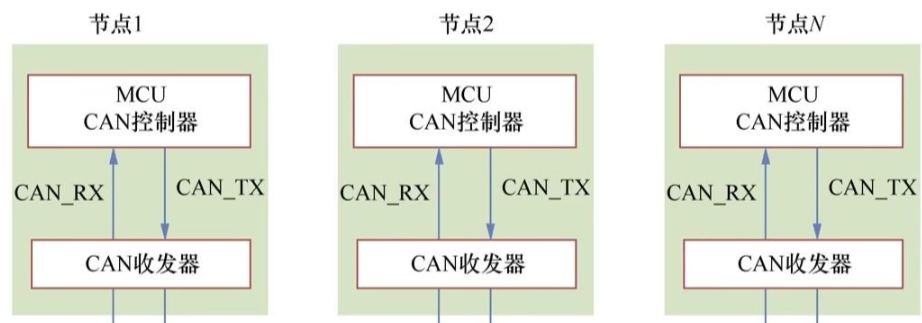
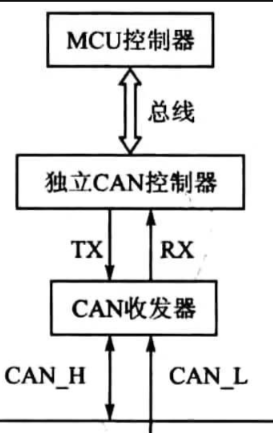
CAN控制器和收发器
硬件上,一个典型的CAN节点有三层:MCU → CAN控制器 → CAN收发器 → 总线。
- CAN控制器 :很多MCU内部集成了(比如NXP的S32K系列、Infineon的TC3xx)。它负责把你要发的数据按照上面的帧格式打包,加上CRC、处理仲裁、管理发送接收邮箱。你写代码调
Can_Write,实际就是往控制器的某个邮箱里扔了8个字节和ID,剩下的控制器帮你干。 - CAN收发器:独立芯片(比如TJA1050、MCP2551)。它的工作很简单------把控制器输出的数字信号(TTL电平)转换成CAN_H/CAN_L的差分信号,反过来也一样。收发器坏了,控制器正常,总线也没反应。
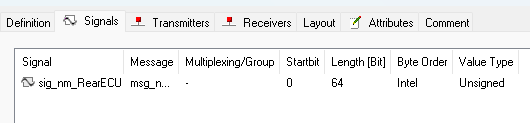
DBC是什么?
CAN总线上一来一回全是二进制:0x123 00 64 00 00 00 00 00 00。光看这些数字,你知道车速是多少吗?不知道。
DBC(CAN Database)就是把这串二进制翻译成人话的词典。它是一个文本文件,里面定义好了:
- 哪个ID对应什么报文
- 报文的哪个字节(哪几个位)表示哪个信号
- 信号叫什么名字(比如
VehicleSpeed) - 数据类型(有符号/无符号/单精度浮点)、字节序(Intel/Motorola)、精度(factor)、偏移量(offset)、物理范围
举个例子:DBC里写着ID 0x123的报文,Byte0和Byte1拼成一个16位无符号整数,乘以0.01后就是车速,单位km/h。那你收到00 64(十六进制)→ 0x0064 = 100 → 100×0.01 = 1.0 km/h。没错,你发现这里有问题------DBC里配的factor是0.01,物理值就是1.0 km/h;如果factor是1.0,那100就代表100 km/h。这些数字怎么来的,取决于传感器的定义。
DBC和AUTOSAR的关系
你在AUTOSAR里配Com模块,本质上就是把DBC里每条报文、每个信号的信息,填到Com模块的配置容器里。DBC里有一个Signal叫VehicleSpeed,Com模块里就要有一个ComSignal,属性一模一样:起始位、长度、字节序、因子、偏移量。DBC里有一个报文,周期20ms,Com模块里就要配一个ComIPdu,发送类型配成周期20ms。
为什么这一步很重要
很多人一上来对着Davinci或EB配置界面发懵,根本原因就是脑子里没有DBC这根弦。DBC是你从"物理总线上的二进制"到"应用层能用的物理值"之间的那座桥。你把这个桥搭清楚了,AUTOSAR的Com配置就是照葫芦画瓢。下面我们的实战,就从一个最简单的DBC文件开始。
5:实战工具认知
打开配置工具之前,有件事得先讲明白------AUTOSAR这三层架构到底是怎么用工具落地的。很多新人一开始就懵,是因为分不清EB、MATLAB、Vector这些工具到底是干啥的,它们之间什么关系。
先记住一句话:MATLAB做应用,Vector做系统,EB做底层。
我画个简单的三层架构,你就明白了:
- 应用层(Application Layer):这里面跑的是你的算法逻辑------车速怎么算、灯光怎么控、电机怎么转。这一层跟硬件完全无关。
- 运行时环境(RTE):应用层和底层之间的"桥梁",负责把算法要发的信号传递下去,把底层收到的信号传上来。
- 基础软件层(BSW):这才是真正跟芯片打交道的部分。CAN驱动、操作系统、通信协议栈,全在这一层。
那工具怎么分工?
MATLAB/Simulink做应用层 。你在Simulink里搭模型、写算法,生成C代码。这些代码就是SWC(Software Component),跑在RTE上面。用学术点的话说,MATLAB负责"基于模型的设计",你画好算法框图,它帮你生成符合AUTOSAR标准的组件代码。
Vector工具做系统设计和RTE生成 。Vector的工具链有两把刷子:DaVinci Developer用来设计SWC的架构------定义端口、接口、数据类型。
EB tresos和configuration做基础软件配置 。这一层最接地气。你在EB里配置CAN控制器用哪个波特率、Dio引脚映射到哪个寄存器、OS任务周期是多少毫秒------然后它生成BSW代码和MCAL驱动。EB管的是"底层怎么跑"。
三者的关系怎么串起来?
我给你说人话:
- 你在MATLAB里把算法模型搭好,生成SWC代码
- 你在Vector DaVinci里把这些SWC的接口定义清楚,生成RTE
- 你在configuration里把CAN、GPIO、OS这些底层驱动配好,生成BSW
- 最后把这三坨代码编译到一起,烧进芯片
说白了,你不用在EB里关心应用层算法怎么写,也不用在MATLAB里纠结CAN寄存器配哪个值。各司其职,各管一摊 。
我们接下来要做的CAN报文配置,主力战场在Vector(配RTE和通信矩阵)。MATLAB那一层,等你的信号能发出来、收回去,再往上加算法逻辑。
把这三把工具的分工搞清楚了,后面的配置就不会再"串戏"了。
6:实战流程
我们以EB tresos配底层,Vector Davinci配RTE和通信矩阵为例。你不需要同时打开两个工具,但脑子里要清楚:EB管BSW,Vector管RTE和SWC之间的信号路由。
发送一帧CAN报文,需要配置哪些模块?
从应用层往下走,一共经过五个核心模块:RTE → Com → PduR → CanIf → Can。每个模块配什么,我拆开讲。
1. RTE(运行时环境)
RTE不是你自己配的,是Vector工具根据SWC的端口定义自动生成的。你需要做的是:在Davinci Developer里,把SWC的发送端口(Sender Port)和一个信号绑定。比如你建一个SWC叫"VehicleSpeedProvider",它有一个发送端口叫"SpeedOut",你要把这个端口映射到Com模块里的某个Signal。
RTE的作用就是生成一个函数调用------当你的应用代码想发车速时,调用Rte_Write_SpeedOut(SpeedValue),这个函数里再调用Com模块的发送接口。
2. Com模块(通信模块)
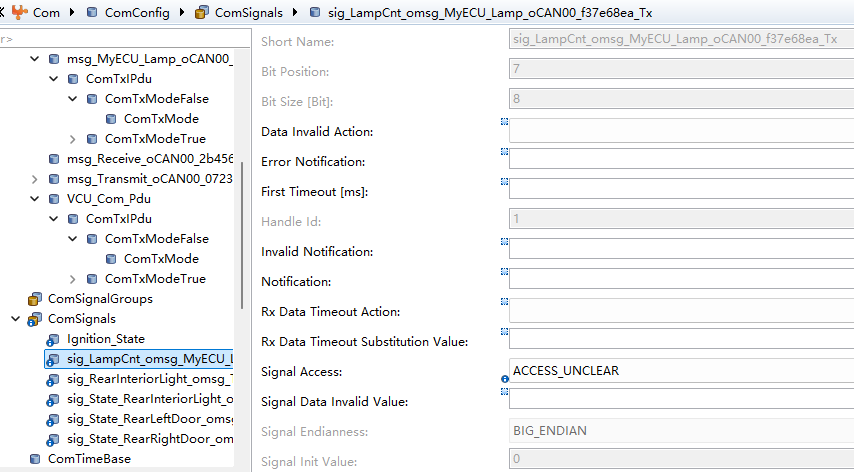
这是你最需要花时间配的地方。在configuration里打开Com模块,主要配三类参数:
-
ComSignal :定义一个信号。参数包括:
ComSignalName:信号名字,比如"VehicleSpeed"ComSignalType:数据类型,比如UInt16ComSignalBitPosition:起始位,比如0(表示从第0位开始)ComSignalBitLength:位长度,比如16位ComSignalByteOrder:字节序,BOOLEAN(小端/Intel)或BOOLEAN(大端/Motorola)ComSignalInitValue:初始值,比如0ComSignalEndianness:字节序类型
-
ComIPdu:把Signal打包成一个Pdu。参数包括:
-
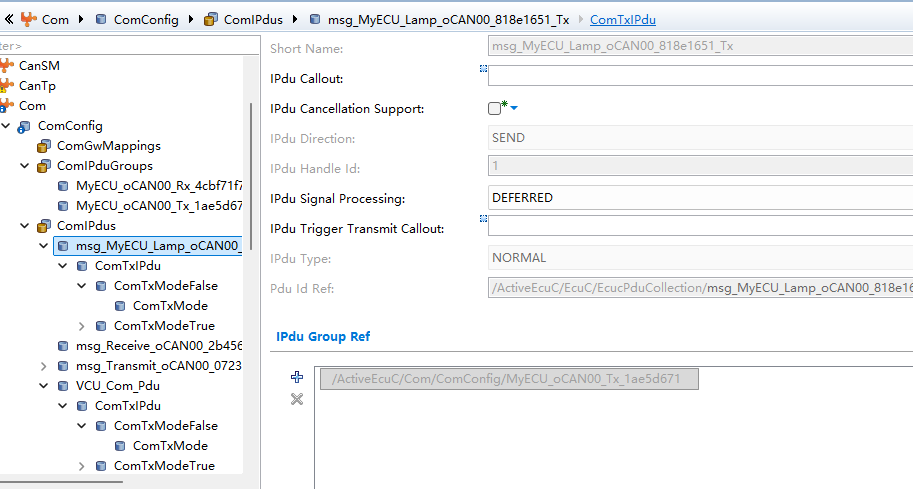
-
ComIPduName:Pdu名字,比如"Msg_VehicleSpeed"ComIPduSignalRef:引用刚才配的VehicleSpeed信号ComIPduSduLength:Pdu的总长度,比如4字节ComIPduTxModeTrue:发送类型,选TRUE表示周期发送ComIPduTxModeTimePeriod:周期,比如10000微秒(10ms)
-
ComIPduGroup:可选,把多个Pdu分组管理。
关键细节 :ComIPduTxModeTrue配了周期发送后,Com模块内部会启动一个定时器,每个周期自动调用Com_MainFunctionTx,把信号值打包发下去。
3. PduR模块(协议数据单元路由器)
PduR基本不用配,用默认值就行。你需要确认的是:PduR的路由表里,从Com过来的Pdu被路由到了CanIf。EB里一般在PduRRoutingTables容器里配一条规则:SourceModule = Com,DestinationModule = CanIf。
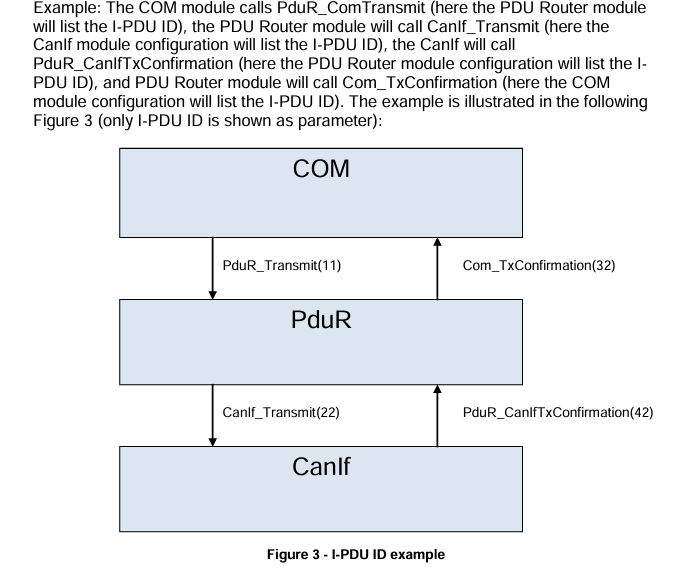
PduR的作用就是个"二传手"------Com调用PduR_ComTransmit,PduR查路由表,调用CanIf_Transmit。
4. CanIf模块(CAN接口)
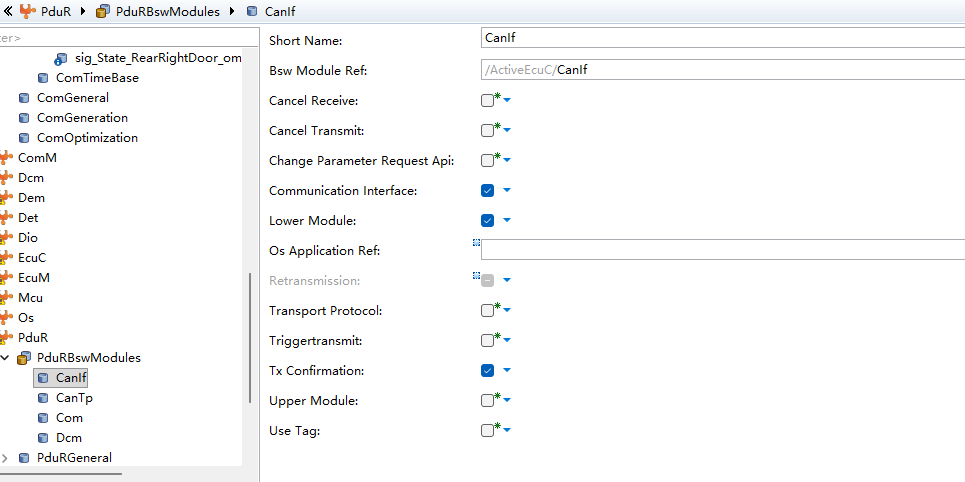
CanIf的关键配置是硬件对象句柄(HOH)。你需要做:
-
创建一个
CanIfHoh(硬件对象句柄),参数包括:CanIfHohId:Hoh编号,比如0CanIfHohType:类型,发送选CANIF_HOH_TYPE_TX,接收选CANIF_HOH_TYPE_RXCanIfHohCanId:CAN ID,比如0x123CanIfHohCanIdType:ID类型,标准帧(11位)选CANIF_CANID_TYPE_STANDARDCanIfTxBufferType:发送缓冲区类型,一般选CANIF_TX_BUFFER_TYPE_BASIC
-
把PduR过来的Pdu和这个Hoh绑定:在
CanIfTxPduCfg里配CanIfTxPduCfgHohRef指向刚才的Hoh。
CanIf的作用就是:拿到PduR传下来的数据,找到对应的Hoh,再调用Can驱动的发送函数。
5. Can模块(CAN驱动)
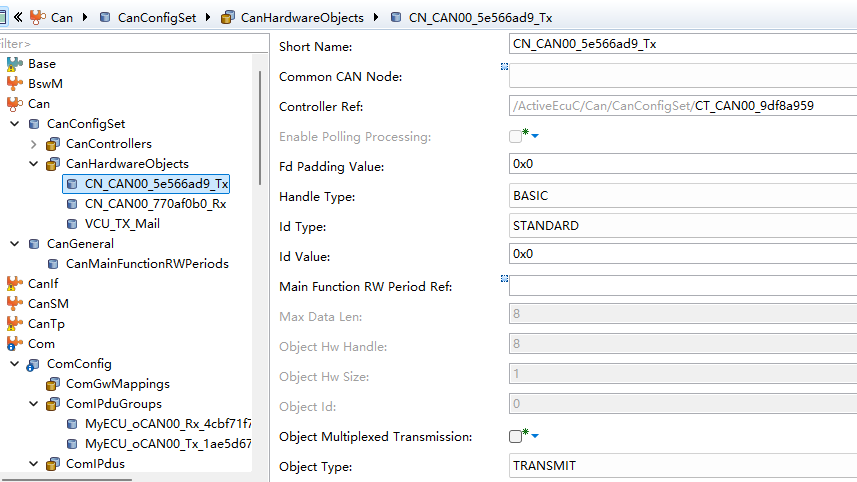
Can模块配最底层的东西:
CanControllerBaudRateConfig:波特率,最常见的是500000(500kbps)或250000CanControllerWakeUpSupport:是否支持唤醒CanHohMapping:把CanIf的Hoh映射到真实的CAN控制器邮箱(Mailbox)
Can驱动不做任何协议逻辑,只做寄存器操作------把数据从指定邮箱写到发送缓冲区,启动发送。
完整链路串一遍
你在应用代码里调用Rte_Write_SpeedOut(100),这个100是物理值(km/h)。RTE调用Com_SendSignal(VehicleSpeed, 100),Com模块根据因子和偏移量换算成原始值,存到Signal缓冲区。Com的周期函数到期,把多个Signal打包成I-PDU,调用PduR_ComTransmit。PduR查路由表,调用CanIf_Transmit。CanIf找到Hoh 0(CAN ID=0x123),调用Can_Write(Hoh0, data, 8)。Can驱动把数据写进控制器邮箱,硬件自动完成SOF、CRC、ACK的封装,发到总线上。
7:整体复盘
写到这里,该收尾了。
你还记得文章开头我说的那句话吗------"从零实现一帧CAN报文的发送和接收"。
现在回头看,我们干的远不止这一件事。我们借着这一帧报文,把AUTOSAR通信协议栈的每一层都亲手摸了一遍。从RTE到Com,从Com到PduR,从PduR到CanIf,再从CanIf到Can驱动,最后到总线上那个实实在在的波形。
这条链路,我再用文字给你串一次。
你写了一行代码,调用Rte_Write_SpeedOut(100),告诉RTE:我要发车速100。RTE不废话,直接调Com模块的发送接口。Com模块拿到这个物理值,根据你配的因子和偏移量,换算成原始值,存到对应的Signal缓冲区里。然后你配的那个周期定时器到了------比如10ms------Com模块醒了,把所有待发的Signal按照字节序、起始位,一个比特一个比特地塞进I-PDU里,打包成一个完整的字节数组。它喊一声PduR_ComTransmit,把数据递出去。
PduR接过数据,翻了翻你配的路由表,发现这条Pdu的目的地是CanIf,二话不说调CanIf_Transmit。CanIf拿到数据,看了一眼你配的硬件对象句柄------哦,这个Pdu用的是Hoh 0,CAN ID是0x123,标准帧。它把数据和这个Hoh绑在一起,调Can_Write扔给CAN驱动。
CAN驱动是最实在的那一层。它不管什么Signal、Pdu、路由,只管一件事:把数据从指定的邮箱搬到CAN控制器的发送缓冲区里,然后往发送寄存器里写一个启动位。剩下的------SOF、ID、CRC、ACK、EOF------全是硬件自己干的事。你拿CAN卡一抓,ID 0x123的报文,8个字节的数据,周期10ms,稳稳地挂在总线上。
这就是从你的手指敲出的数字,到总线上跳动的电平,走过的每一步。
你发现没有,我们从头到尾没按规范文档的顺序学。规范是按模块拆开的------Com一个PDF,PduR一个PDF,CanIf一个PDF。如果你顺着规范学,你会先花三个月背每个模块的结构体定义,背完了还是不知道这些模块怎么串起来。
但我们换了一个顺序。我们从"我要发一帧报文"这个具体的问题出发,从上往下推。推的过程中,你自然要知道Com模块怎么配Signal、PduR怎么配路由表、CanIf怎么配Hoh、Can驱动怎么配波特率。你不是在背规范,你是在解决一个个真实的问题。问题驱动认知,而不是规范驱动认知。
这两种学习路径的区别,我说给你听。
第一种,背规范。你知道了ComIPdu的TxModeTrue可以配周期发送,但你不知道这个参数不配代码会卡死在哪里。第二种,实战倒推。你配了周期10ms,发现报文根本没发,你查了半天,最后发现Com_MainFunctionTx这个函数根本没被OS调用。于是你回去配OS Task,把Com主函数挂进去。这个坑你踩过一次,一辈子不会忘。
这就是工程师思维和考试工程师思维的分水岭。
考试工程师拿到问题,第一反应是翻规范------"规范第几章怎么写的"。工程师拿到问题,第一反应是搭环境、抓log、加断点------让事实说话。规范永远不会告诉你"你的Com主函数没被调度",逻辑分析仪会。
所以我想跟你说的是,这篇文章从头到尾,我真正想传递给你的,不是AUTOSAR的配置步骤,而是一种思维方式:
先让东西跑起来,再用跑起来的结果去反哺你对规范的理解。
一帧CAN报文很小,小到只有8个字节。但它足够你打通AUTOSAR通信协议栈的任督二脉。你亲手配过这一轮之后,再去翻那些几千页的SWS,你会发现------原来规范里每一句话,背后都是让你踩过的一个坑、调通过的一条链路。
规范是前人踩完坑之后写的总结,不是你踩坑之前的教科书。
最后一句话:去跑你的第二帧报文吧。这一回,你不用再看这篇文章了。