适用:S7-1200/1500 PLC、Profinet 通讯、全套参数 + 地址 + 程序 + 故障排查
一、前期准备
- 硬件
- AMS3048i 激光测距传感器
- 带 Profinet 口西门子 1200/1500 PLC
- 工业网线、24V 直流电源
- 软件
- 博途 TIA Portal
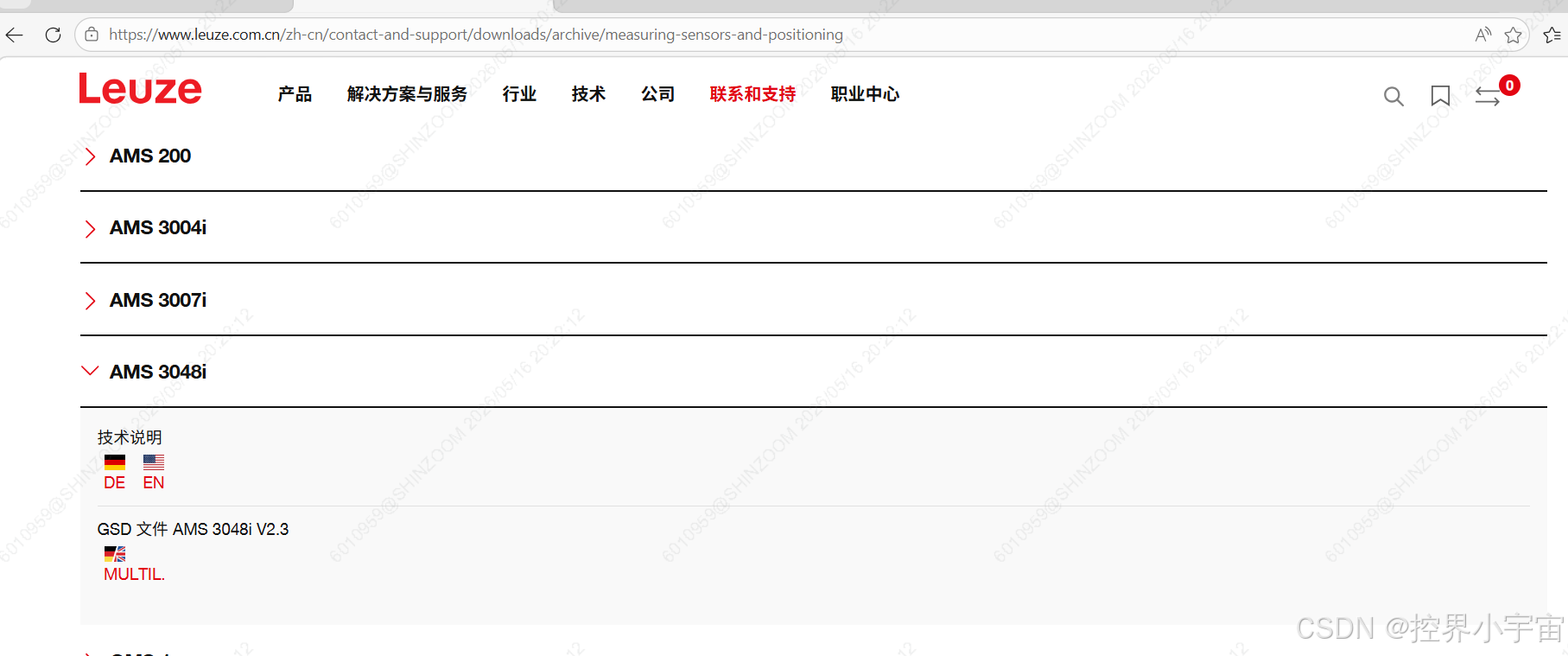
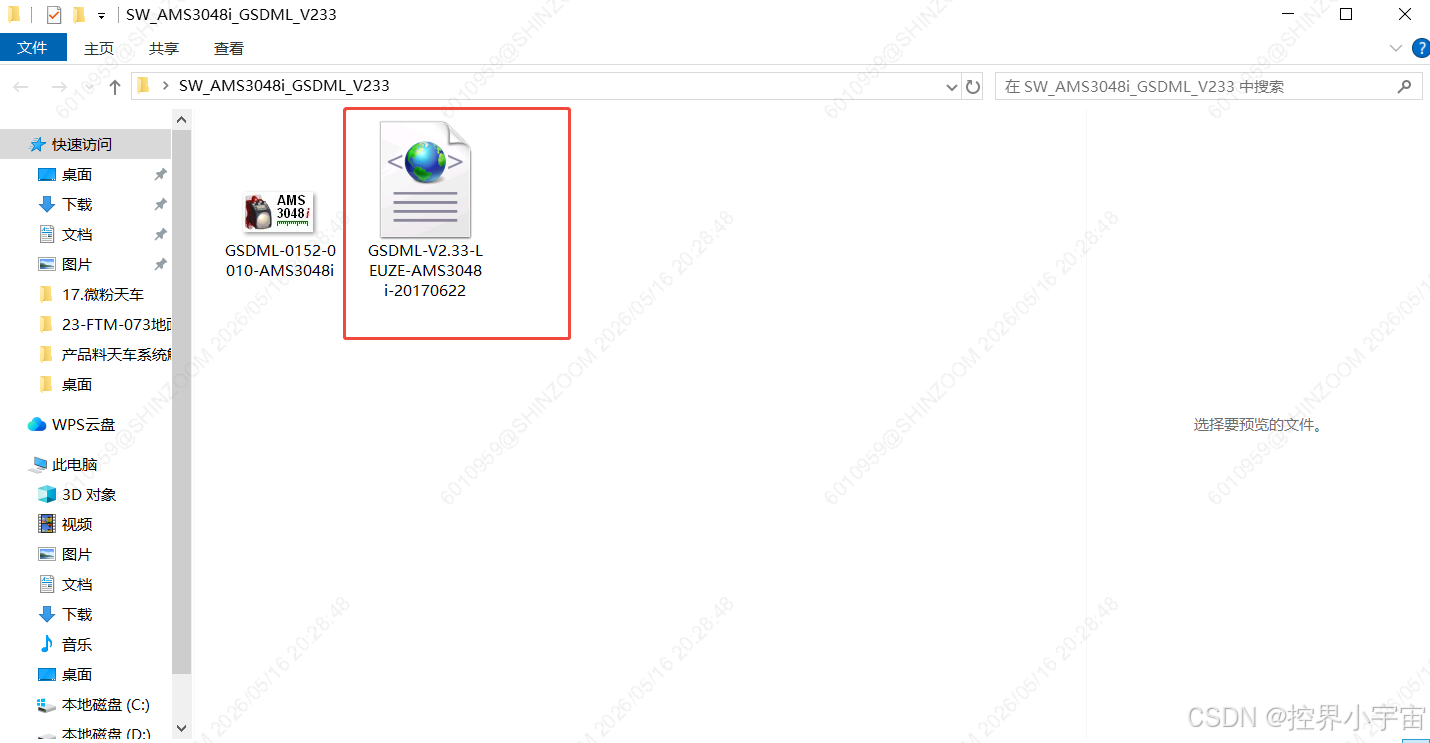
- 劳易测官方AMS348i Profinet GSDML 文件(必须安装)
2.传感器本机设置(重中之重) 1)传感器上电,进入面板菜单2)设置IP 地址 :例 192.168.1.203)设置子网掩码 :255.255.255.04)设置Profinet 设备名称 (英文小写,无空格)5)通讯模式选择 Profinet IO 6)确认测距量程、单位默认 0.1mm7)网线接传感器BUS IN口,BUS OUT 可级联其他设备
二、安装 GSD 文件(首次必做)
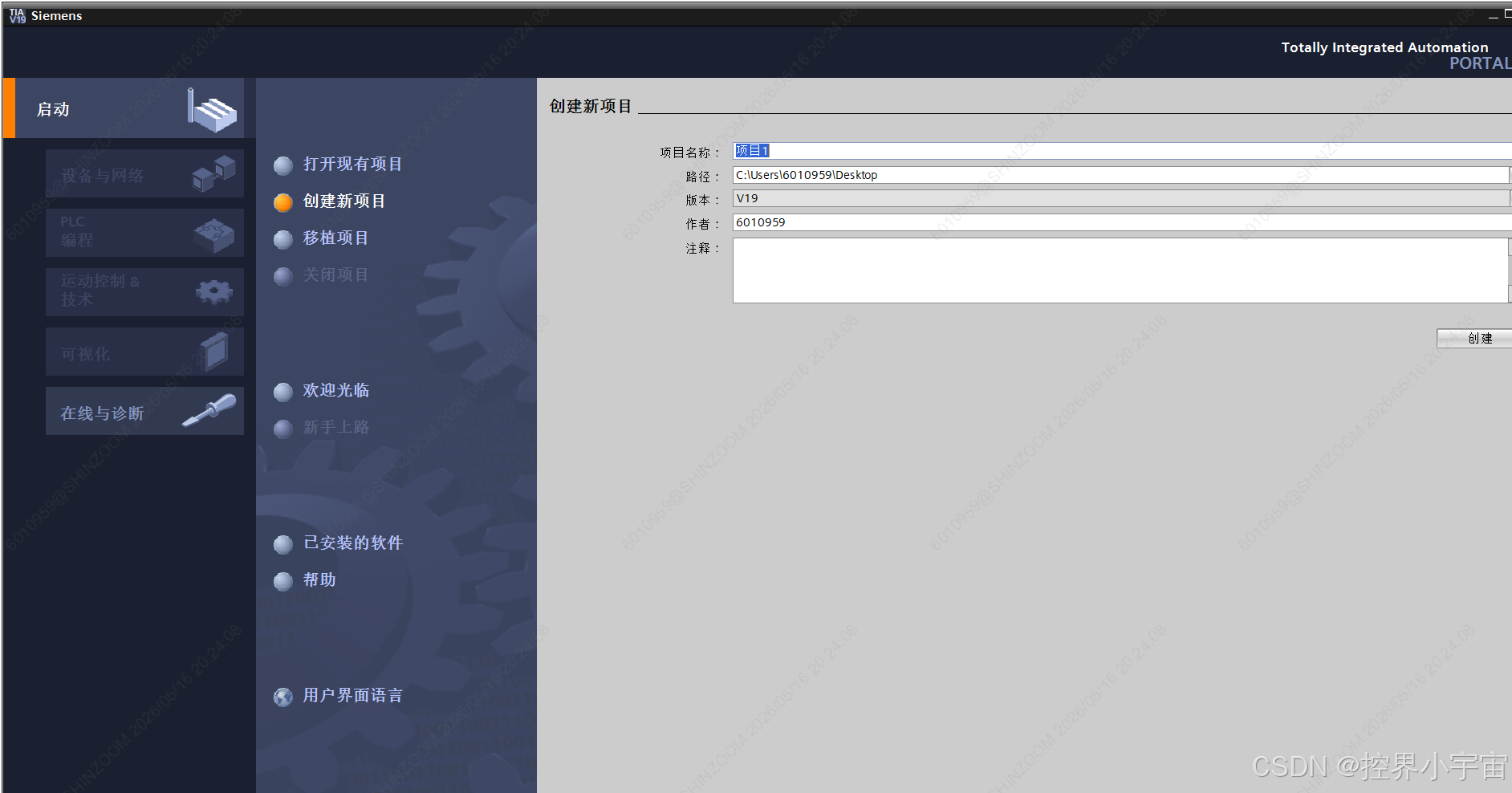
- 打开博途软件,新建空白项目
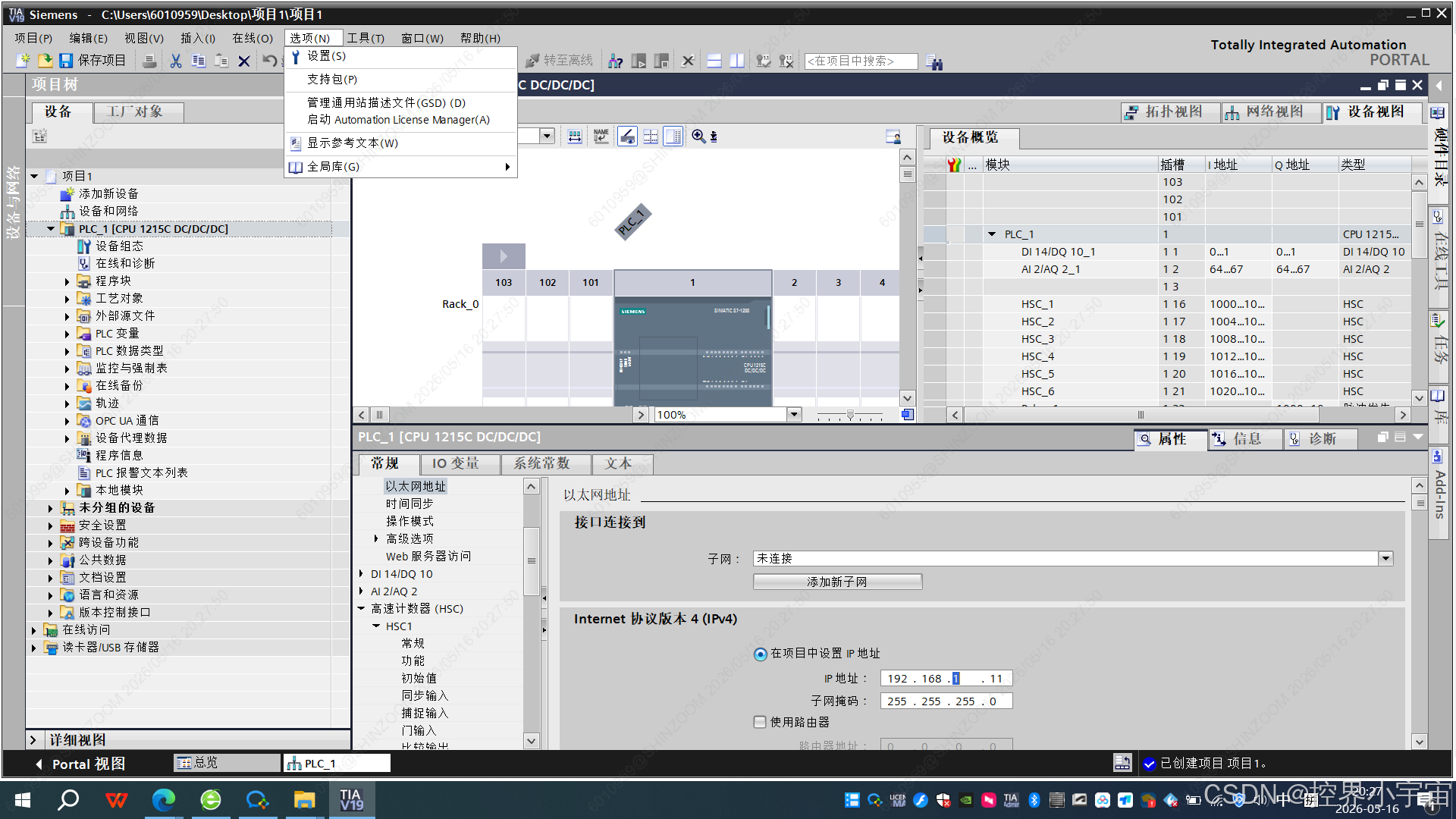
- 顶部菜单栏:选项 → 管理通用站描述文件 (GSD)
- 点击安装 ,找到下载好的 AMS348i GSDML 文件
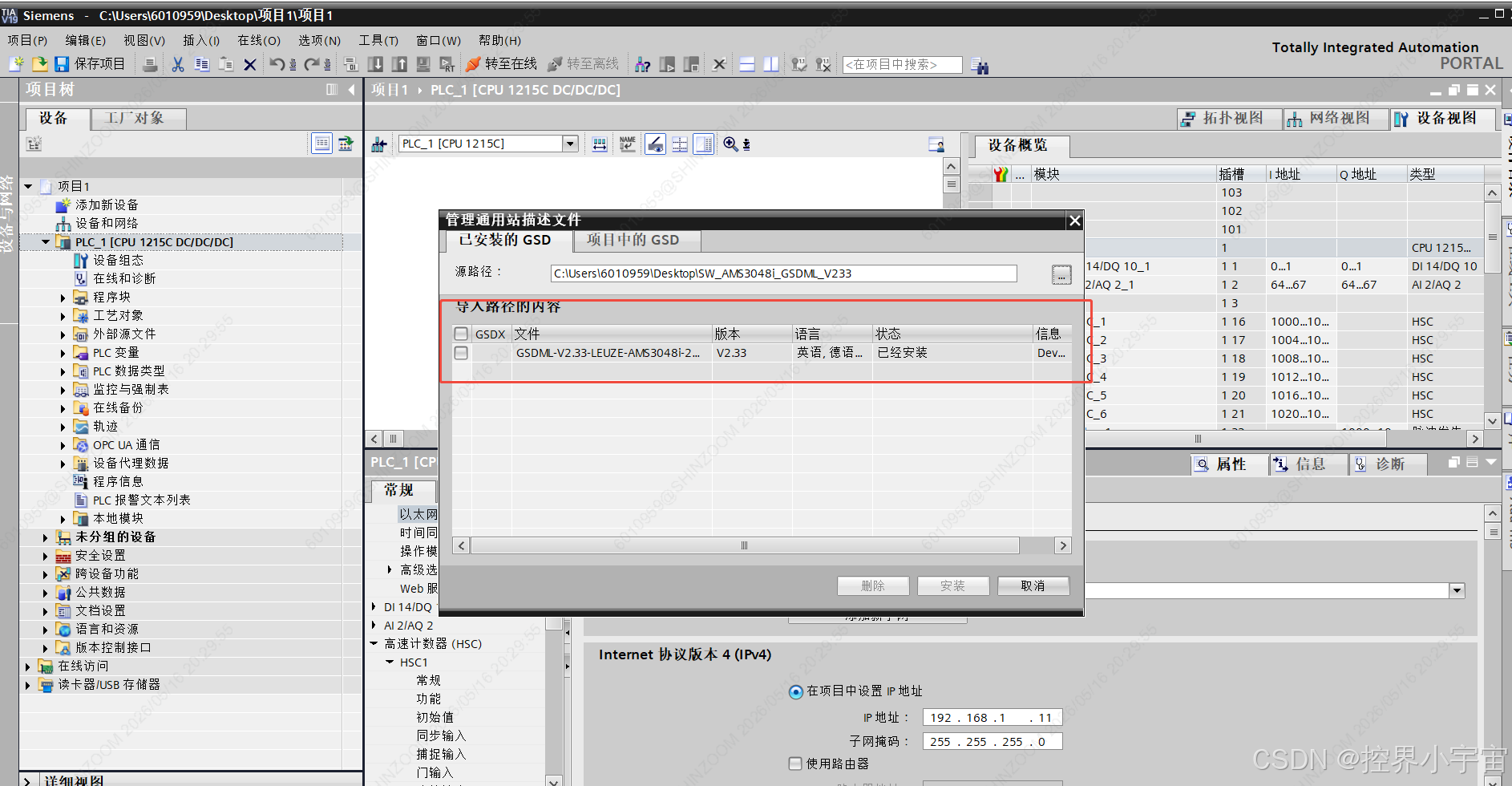
- 等待安装完成,重启博途生效
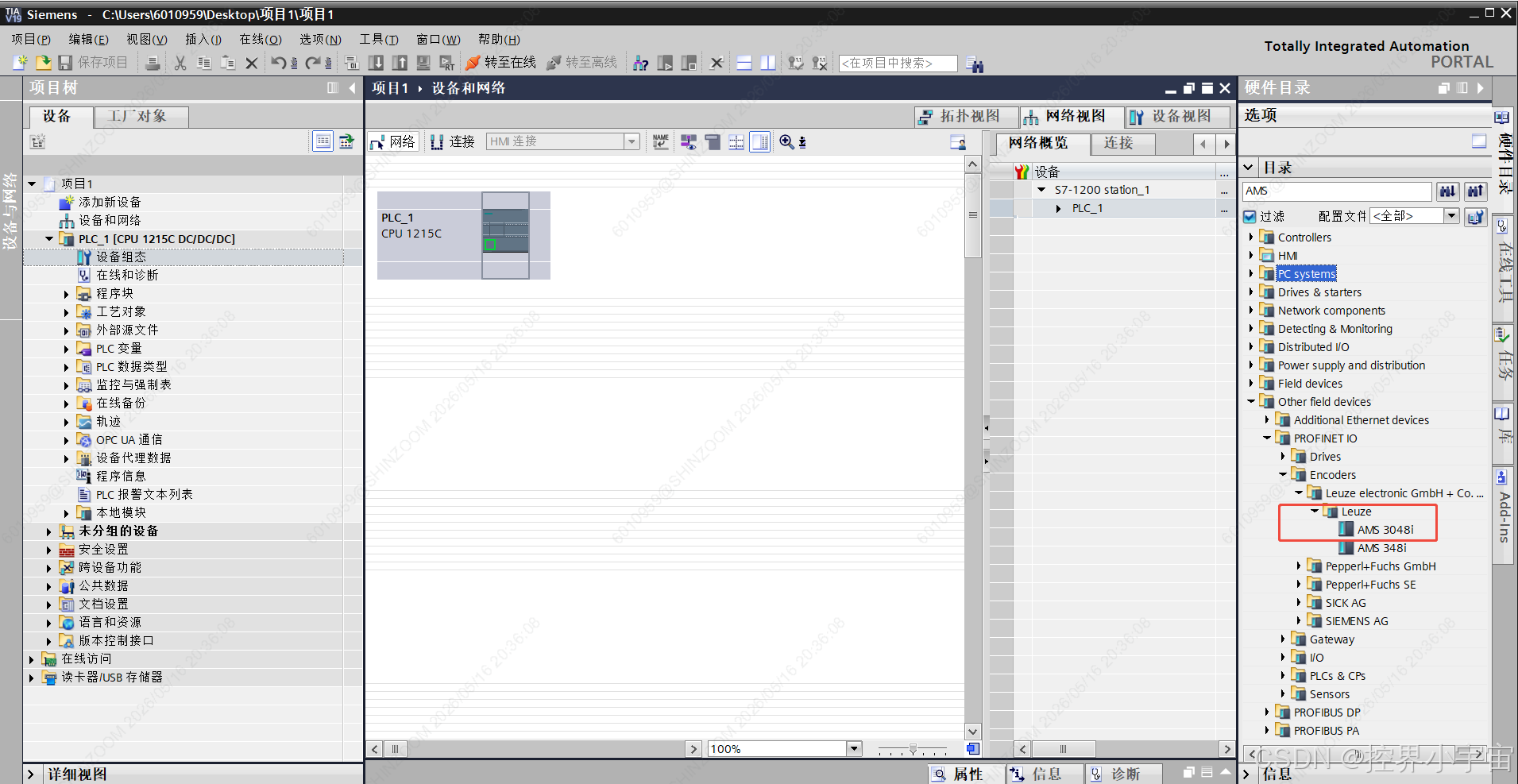
- 安装完成位置:硬件目录 → 其他现场设备 → Profinet IO → Leuze → AMS 348i
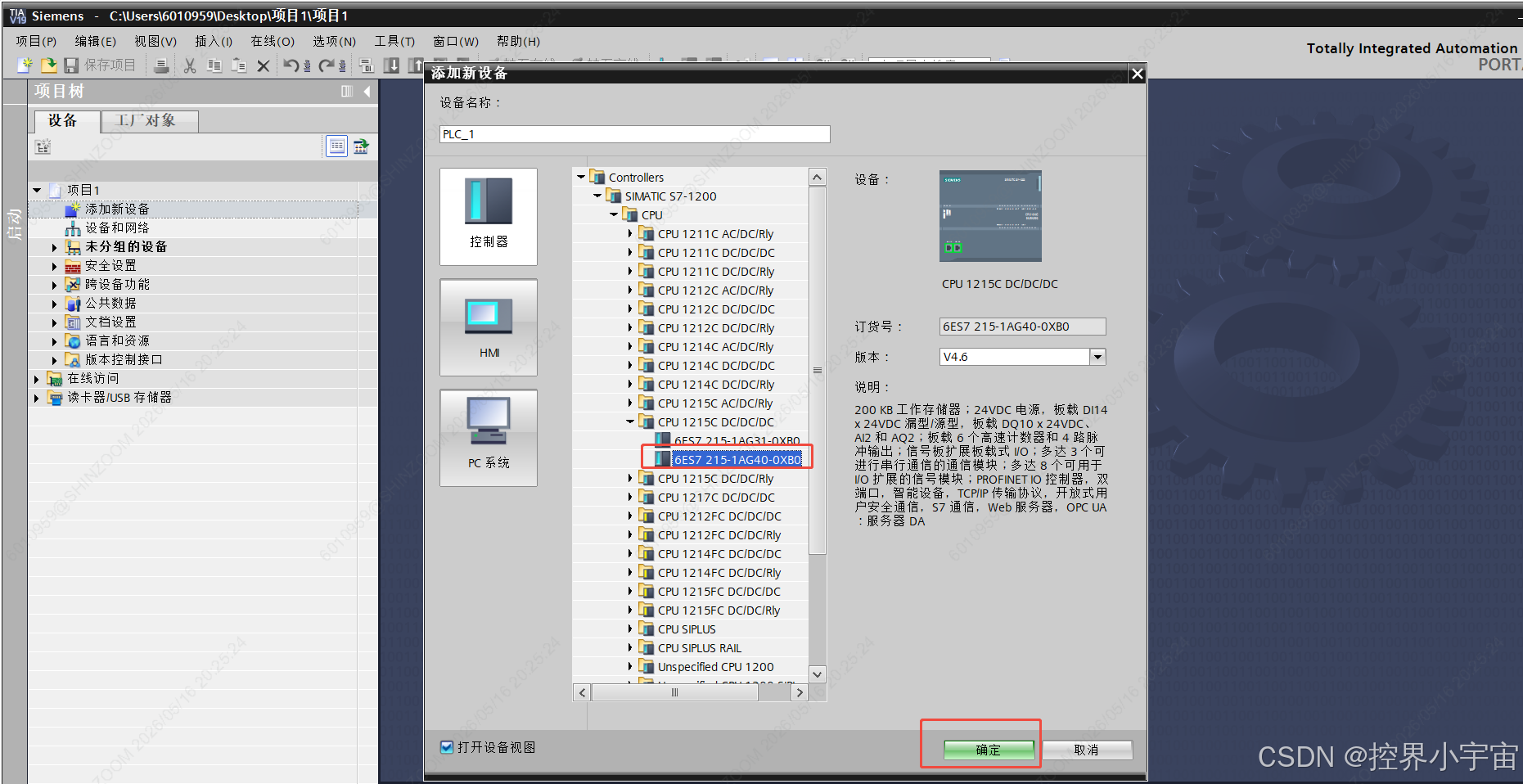
三、新建项目 + 组态 PLC
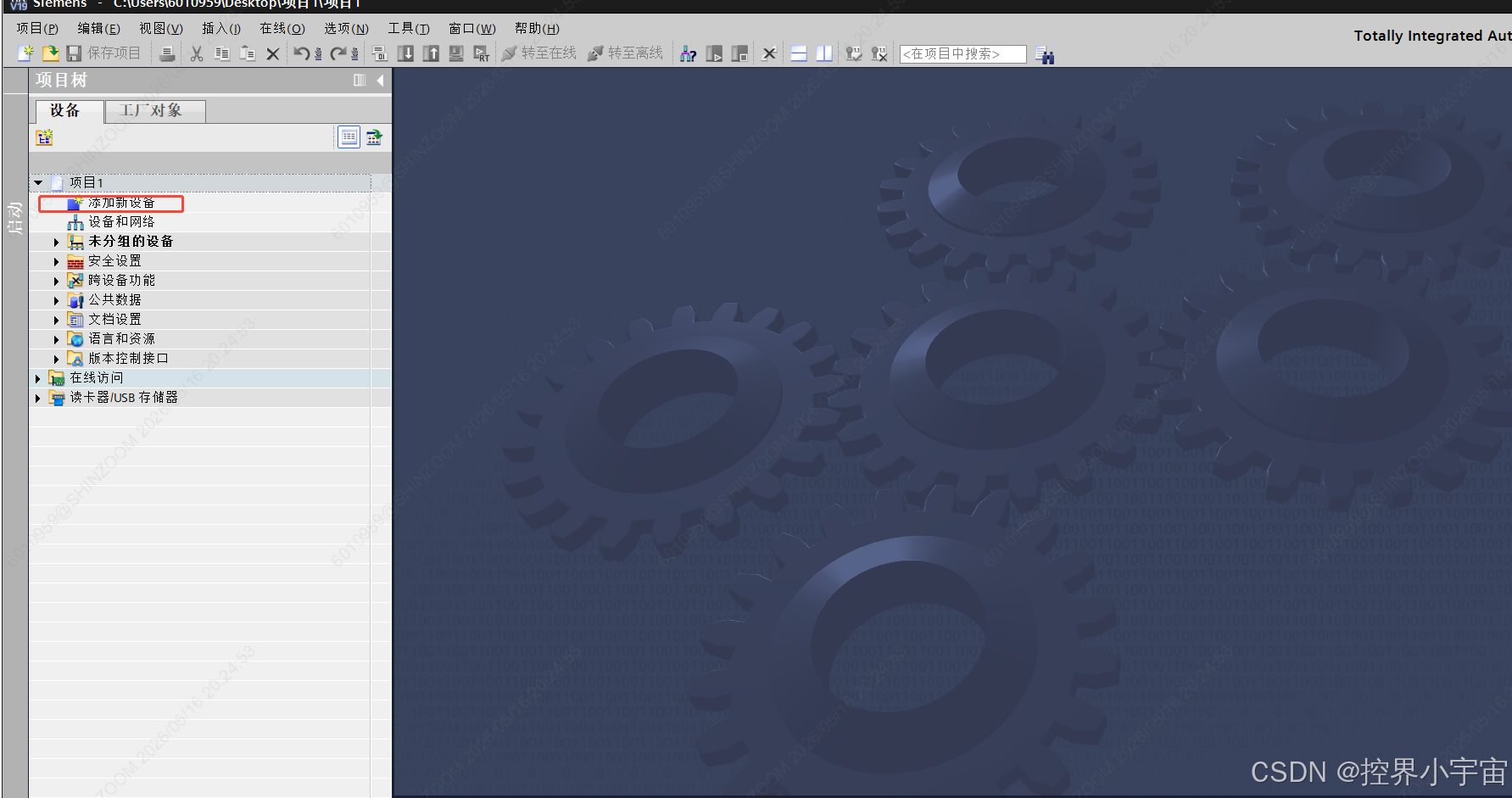
- 创建新项目,进入项目视图
- 点击添加新设备 ,选择对应型号 CPU
- 选中 PLC 以太网口,设置 PLC IP示例:PLC IP:
192.168.1.10掩码:255.255.255.0保证 PLC、传感器、电脑同网段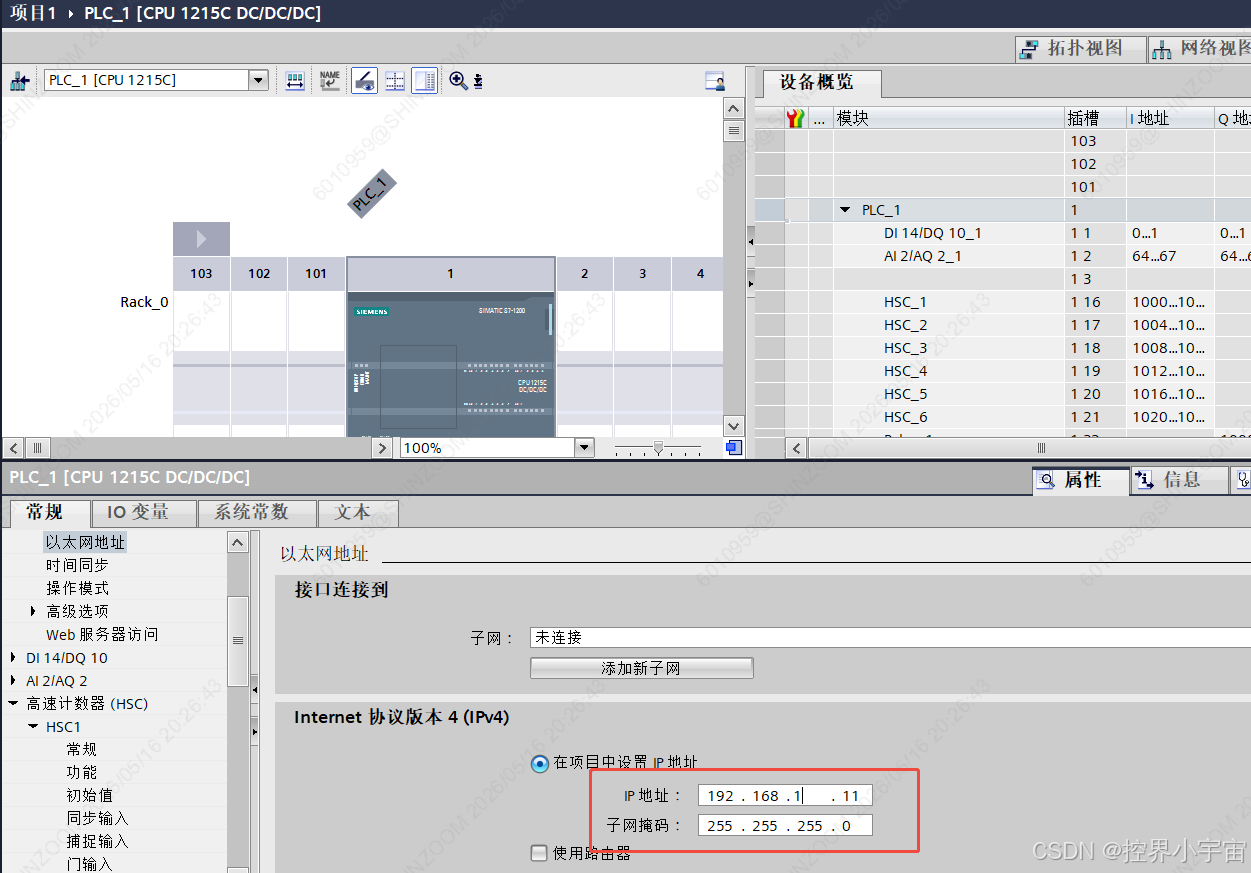
四、网络视图组态 Profinet 从站
- 左侧打开设备和网络 → 切换网络视图
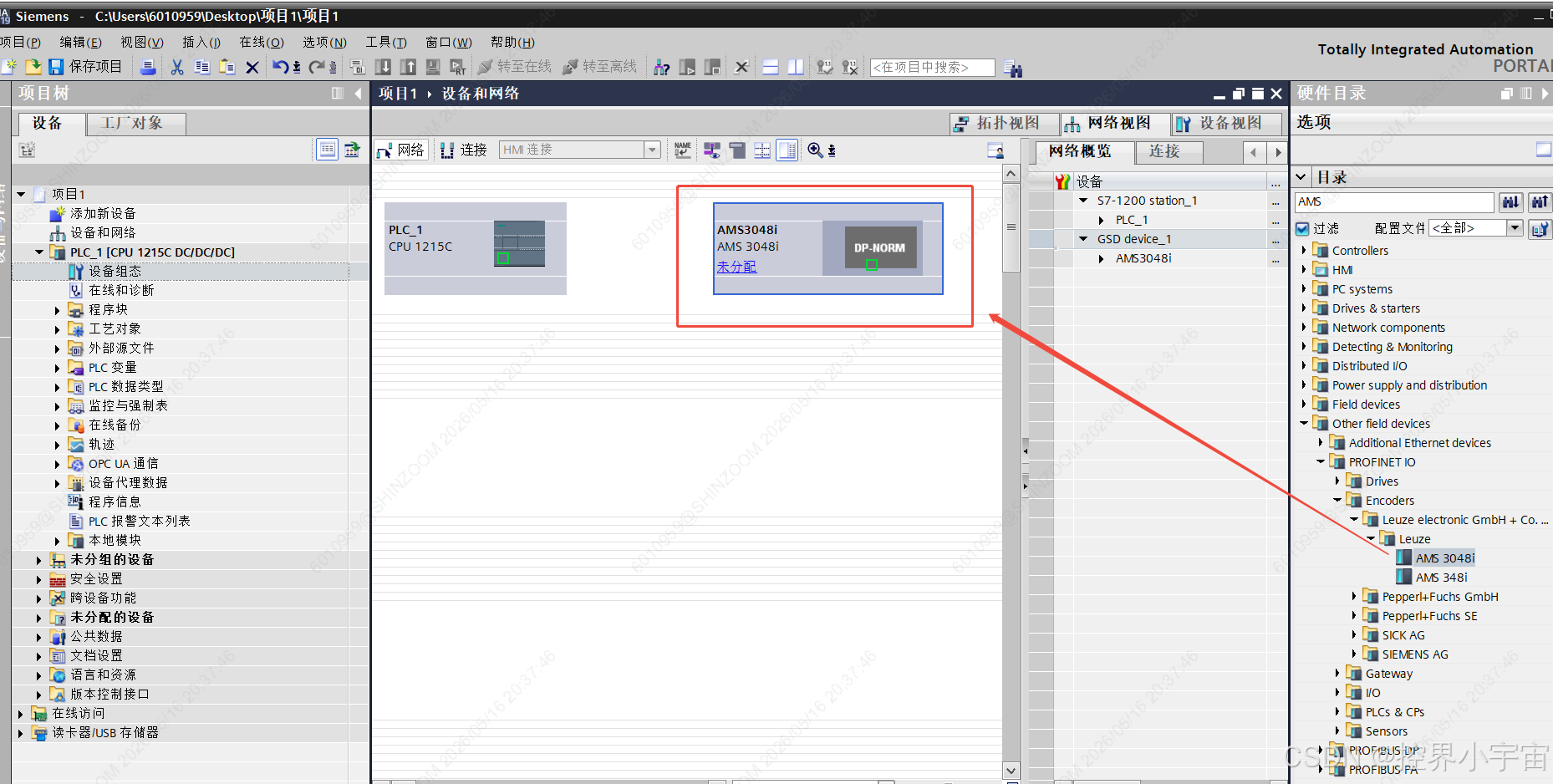
- 右侧硬件库找到 AMS348i ,鼠标拖拽到画布
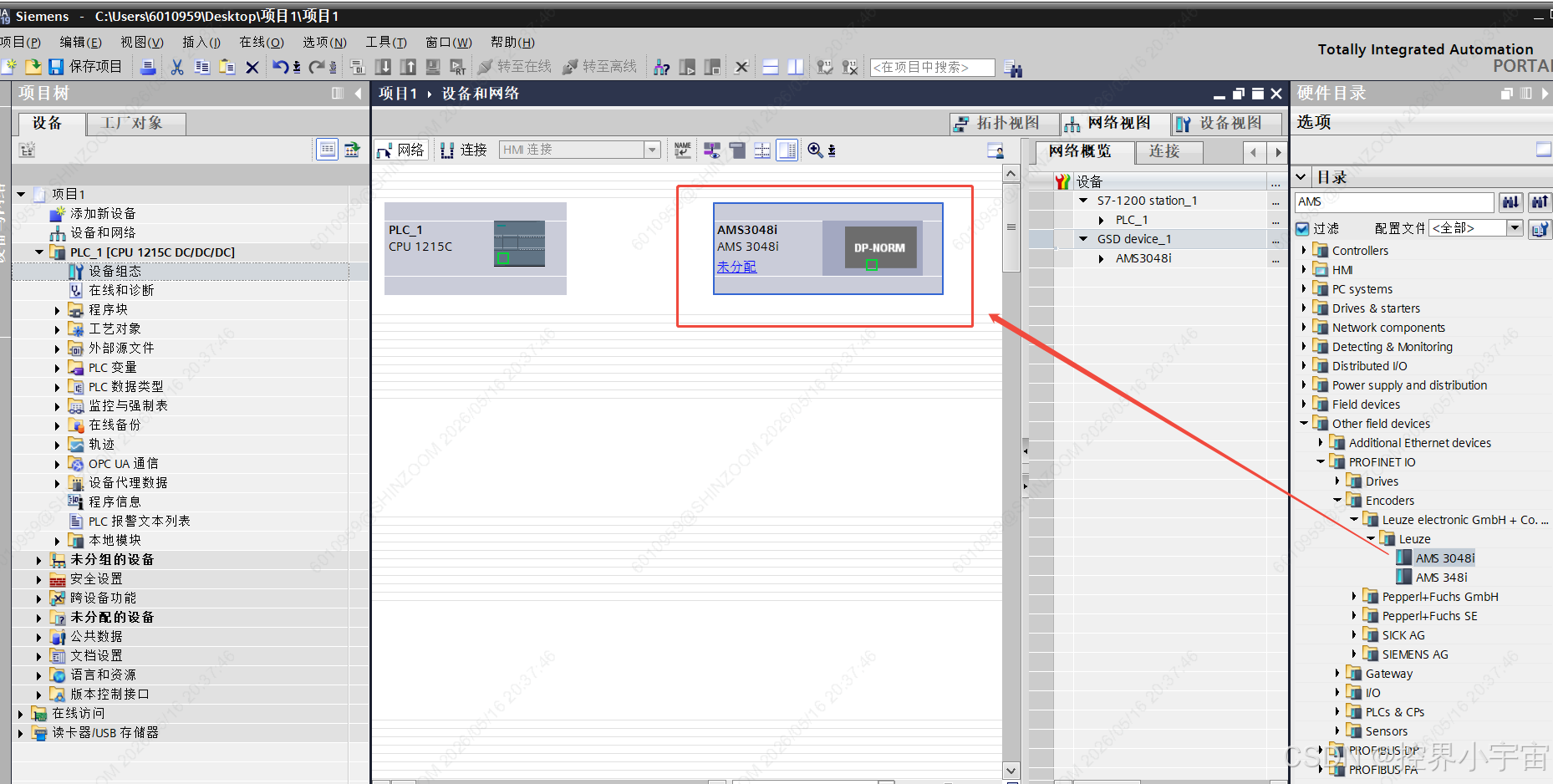
- 鼠标按住 PLC 以太网口,拉线连接 AMS348i 以太网口
- 选中 AMS348i 设备,右侧属性面板设置:
- IP 地址:和传感器面板设置一致
192.168.1.20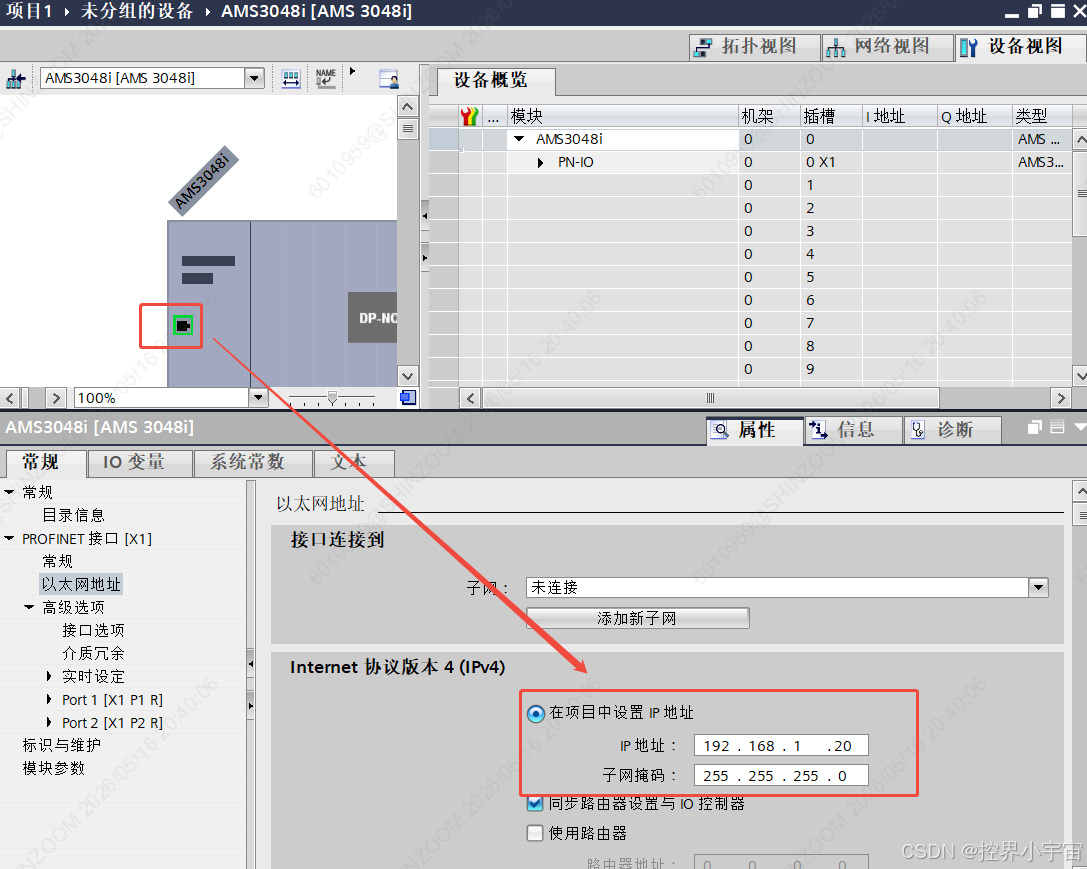
- Profinet 设备名称:与传感器面板完全一致
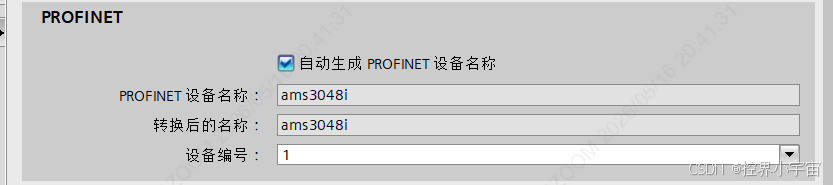
- 设备编号默认即可
五、IO 地址分配(详细数据含义)
双击画布中 AMS348i,进入设备组态右侧添加所需通讯模块,完整常用模块:
1. 输入数据(PLC 读取传感器数据)
1)Position value_1 4Byte 距离值 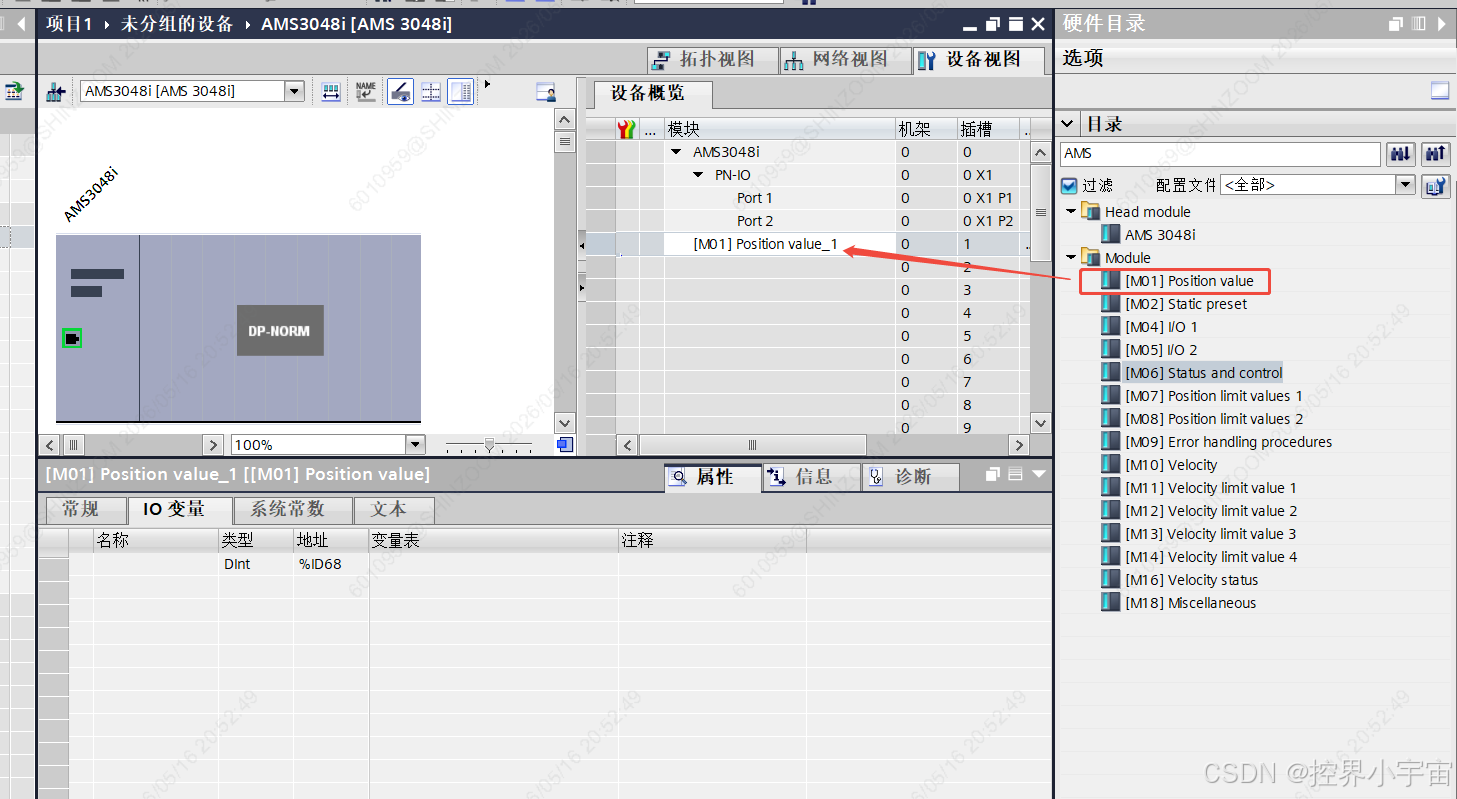
- 数据类型:32 位有符号整数 DINT
- 占用地址:4 个字节
- 单位:0.1 毫米
- 含义:实时测量距离2)Status 2Byte 状态字
- Position value :位置值(通常 mm 为单位)
- value_1 :就是模块 1 输出的那个位置值
2. 输出数据(PLC 下发控制指令)
1)M06:Status and control = 状态与控制模块 2Byte 控制字 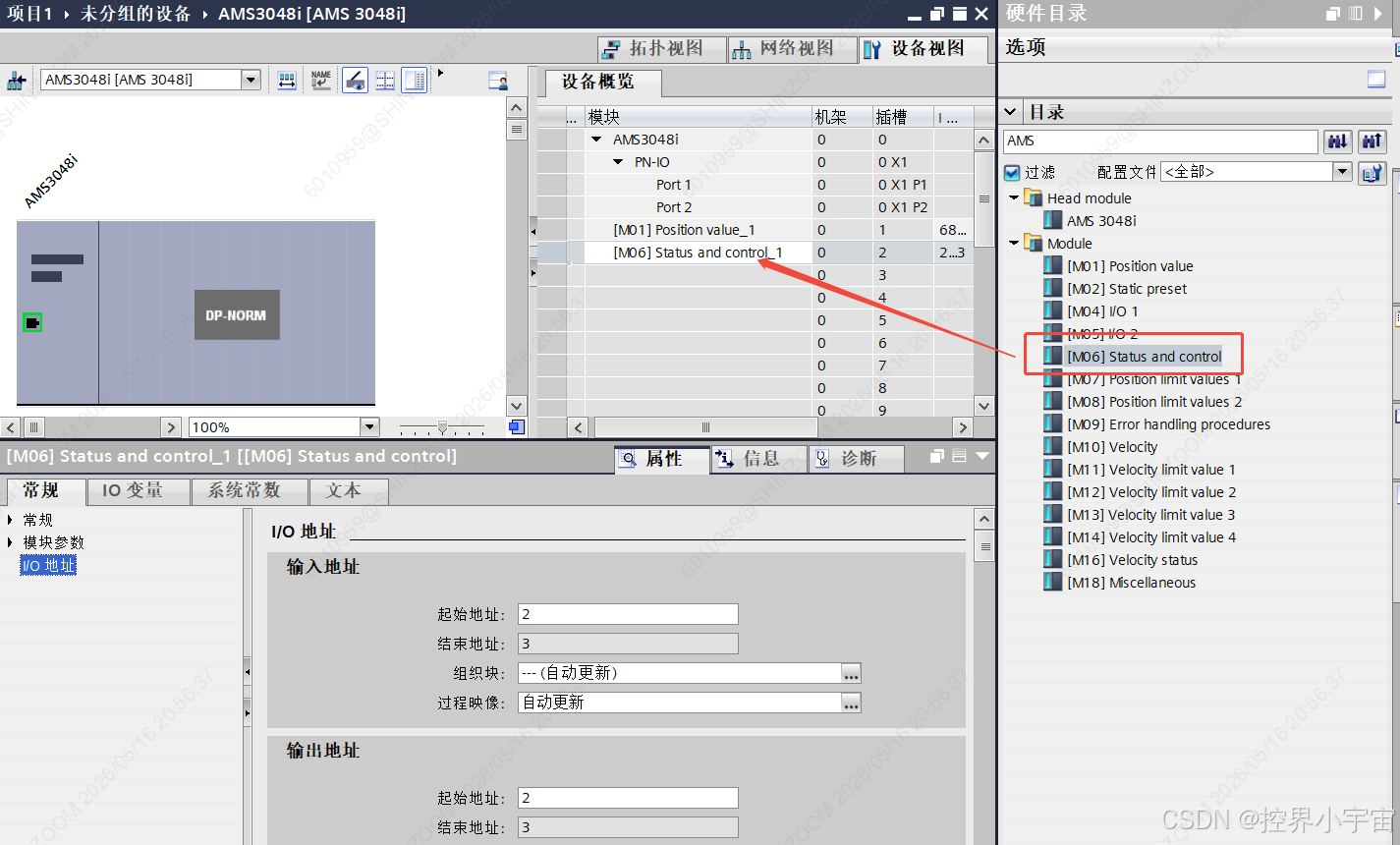
| 位 | 名称 | 含义(=1 时) |
|---|---|---|
| Bit 0 | RDY | 设备就绪(正常工作) |
| Bit 1 | RUN | 设备运行中(正在定位 / 测距) |
| Bit 2 | STBY | 待机模式 |
| Bit 3 | ERR | 故障(硬件 / 通讯 / 测量错误) |
| Bit 4 | WRN | 警告(信号弱、即将超限等) |
| Bit 5 | POS_OK | 位置有效(当前位置可信) |
| Bit 6 | CAL | 标定状态(正在标定 / 已标定) |
| Bit 7 | RES | 保留(固定 0) |
控制字 Control
| 位 | 名称 | 含义(PLC 写 1 触发) |
|---|---|---|
| Bit 0 | RES_DEV | 设备复位(清除故障) |
| Bit 1 | ACK_ERR | 错误确认(清除 ERR 标志) |
| Bit 2 | STBY_ON | 进入待机 |
| Bit 3 | STBY_OFF | 退出待机 |
| Bit 4 | CAL_START | 启动标定 |
| Bit 5 | LASER_ON | 激光打开(仅激光类) |
| Bit 6 | LASER_OFF | 激光关闭 |
| Bit 7 | RES | 保留(写 0) |
3. 自动地址分配规则
博途自动分配 PI 区输入、PQ 区输出举例分配地址:
- 实时距离:PIW100~PIW103(DINT 格式)
- 状态字:PIW104
- 控制字:PQW100
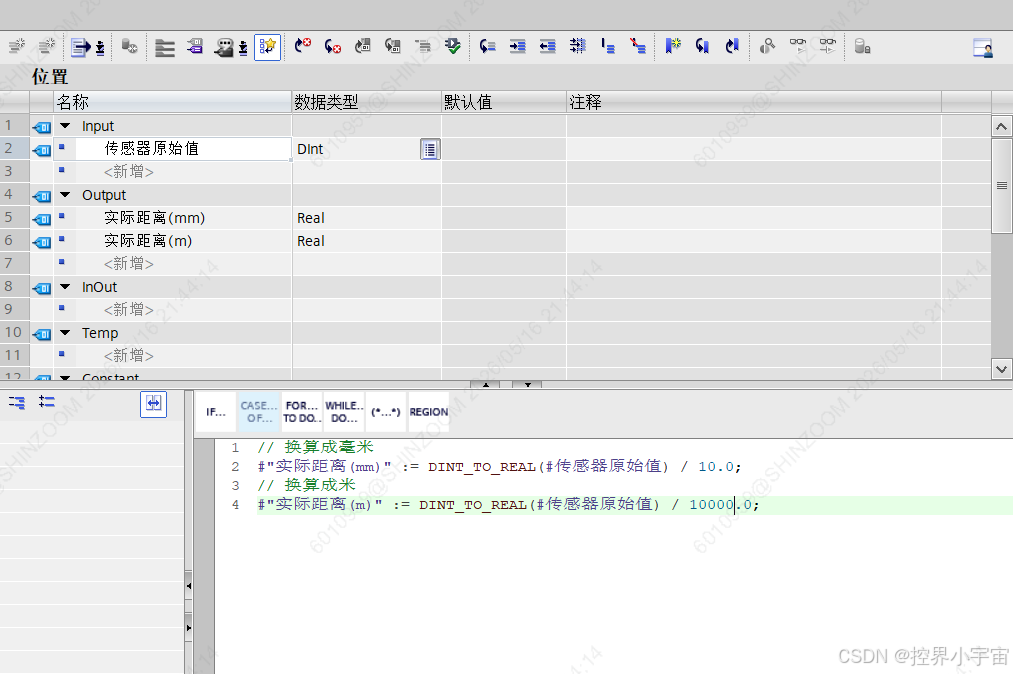
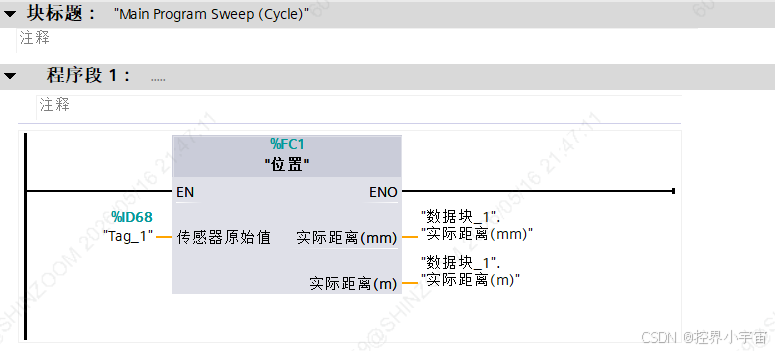
六、数据换算公式(最常用)
传感器原始值 = 整数,单位0.1mm
-
转毫米
实际距离(mm) = 原始数值 ÷ 10
-
转米
实际距离(m) = 原始数值 ÷ 10000
七、完整实用程序
1. 读取实时距离
2. 读取传感器状态
Sensor_Status := IW2;
// 状态位判断
// 第0位:测距就绪 第1位:超出量程 第2位:信号弱3. PLC 控制传感器(清零 / 复位)
// 上升沿触发测距值清零
IF Reset_Sensor THEN
PQW100 := 16#0001;
ELSE
PQW100 := 16#0000;
END_IF;八、项目下载与联机调试
- 编译整个项目,无报错
- 点击下载,勾选 PLC+Profinet 设备一并下载
- 联机在线监控
- 传感器Profinet 绿灯常亮:通讯正常
- 绿灯闪烁:未建立连接
- 红灯报错:参数不匹配、断线、IP 冲突
九、常见报错与解决详解
1.无法建立 Profinet 连接
- 设备名称不一致(最常见),PLC 组态和传感器面板必须一模一样
- IP 网段不一致,修改电脑、PLC、传感器统一网段
- GSD 版本与传感器固件不匹配,更换对应 GSD
2.读取数值固定不变
- 激光被完全遮挡、无反射面
- 超出传感器最大测量量程
- 未开启测量使能
3.数值跳动不准
- 反射面粗糙、强光干扰
- 降低传感器测速,开启滤波参数
4.地址报错、IO 访问错误
- 删减多余未使用的 IO 模块,只保留需要的
十、最简常用精简组态方案(现场快速用)
只添加 2 个模块即可满足 90% 现场使用
- 输入:4Byte 实时距离
- 输出:2Byte 控制字无需多余模块,通讯最稳定、无冗余报错