A Low-Complexity Method for FFT-based OFDM Sensing
I.SIGNAL MODEL OF OFDM SENSING
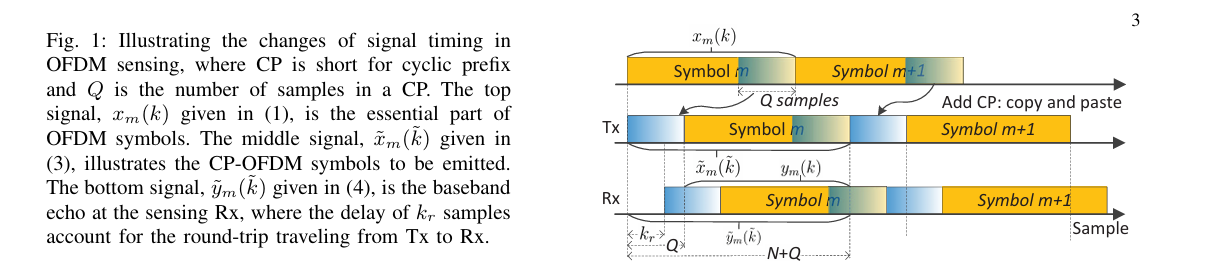
假设sm(n)s_{m}(n)sm(n)表示第m(0,1,2,⋯ ,M−1)(0,1,2,\cdots,M-1)(0,1,2,⋯,M−1)个OFDM符号,存在N个数据符号需要发送。N个数据符号通过N个正交子载波发送,其中T=NTs,B=1/TsT=NT_s,B=1/T_sT=NTs,B=1/Ts,T为数据符号长度T=1/ΔfT=1/\Delta fT=1/Δf。则第m个符号第k个时域信号可表示如下:
xm(k)=1N∑n=0N−1sm(n)ej2πnkTs/T=1N∑n=0N−1sm(n)ej2πnk/N(1) x_{m}(k)=\frac{1}{N}\sum_{n=0}^{N-1}s_{m}(n)e^{j2\pi nkT_s/T}=\frac{1}{N}\sum_{n=0}^{N-1}s_{m}(n)e^{j2\pi nk/N}\tag{1} xm(k)=N1n=0∑N−1sm(n)ej2πnkTs/T=N1n=0∑N−1sm(n)ej2πnk/N(1)
由式子1可知OFDM相当于将N个数据通过尺度为N的DFT(IDFT)实现,反过来也是一样的。
由于循环移位特性,时域数据的时延相当于频域数据的一个相移因此式1也可以写成
xm(<k−l>N)=1N∑n=0N−1(sm(n)e−j2πln/N)ej2πnk/N(2) x_{m}(\left<k-l\right>N)=\frac{1}{N}\sum{n=0}^{N-1}\left(s_{m}(n)e^{-j2\pi ln/N} \right)e^{j2\pi nk/N}\tag{2} xm(⟨k−l⟩N)=N1n=0∑N−1(sm(n)e−j2πln/N)ej2πnk/N(2)
<k−l>N\left<k-l\right>N⟨k−l⟩N表示对N取模,lll表示RX处的回波时延。如图一所示OFDM符号的前面加了长度为Q的循环前缀,因此OFDM信号可表示为:
x~m(k~)=xm(<k~−Q>N),k=0,1,⋯ ,N+Q−1(3) \tilde{x}{m}(\tilde{k})=x_{m}(<\tilde{k}-Q>_{N}),k=0,1,\cdots,N+Q-1 \tag{3} x~m(k~)=xm(<k~−Q>N),k=0,1,⋯,N+Q−1(3)
将k=<k~−Q>Nk=<\tilde{k}-Q>{N}k=<k~−Q>N带入1,即可得到图1所示x~m(k~)\tilde{x}{m}(\tilde{k})x~m(k~)和xm(k)x_{m}(k)xm(k)的关系。
接下来我们建立一个信号模型来描述目标回波。为了方便处理我们建立一个只有单个目标的感知模型。其距离、速度、回波系数分别为r,v,αr,v,\alphar,v,α,更近一步假设r,v,αr,v,\alphar,v,α在M个OFDM符号内保持不变。OFDM信号来回假设产生了kr=⌊2r/(CTs)⌉k_r=\lfloor 2r/(CT_s) \rceilkr=⌊2r/(CTs)⌉个时延的样点。⌊x⌉\lfloor x \rceil⌊x⌉表示向下取整,C电磁波传播速度,TsT_sTs为采样时间。同样的物体的Doppler频偏可表示为fd=2vfc/Cf_d=2vf_c/Cfd=2vfc/C。考虑 krk_rkr和fdf_dfd后目标物体回波可表示为:
y~m(k~)=αx~m(k~−kr)e2πmT~fd,k~=0,1,2,⋯ ,N+Q+1(4) \tilde{y}{m}(\tilde{k})=\alpha\tilde{x}{m}(\tilde{k}-k_r)e^{2\pi m\tilde{T}f_d},\tilde{k}=0,1,2,\cdots,N+Q+1\tag{4} y~m(k~)=αx~m(k~−kr)e2πmT~fd,k~=0,1,2,⋯,N+Q+1(4)
T~=T+QTs\widetilde{T}=T+QT_sT =T+QTs表示OFDM包含CP的符号长度。
II. FFT-BASED OFDM SENDING(FOS)
如图1所示y~m(k~)\tilde{y}{m}(\tilde{k})y~m(k~) 包含一个循环前缀。如果kr≤Qk_r\le Qkr≤Q,移除y~m(k~)\tilde{y}{m}(\tilde{k})y~m(k~) 前Q个样点。将式子4展开:
Yb(k)=α∑n=0N−1e−j2πnkrNe−2πknN×∑m=0M−1e2πmT~fde−j2πbmM(5) Y_b(k)=\alpha \color{Orange}{ \sum_{n=0}^{N-1}e^{-\frac{j2\pi nk_r}{N}}e^{-\frac{2\pi kn}{N}}}\times\color{red}{\sum_{m=0}^{M-1}e^{2\pi m\tilde{T}f_d}e^{-j\frac{2\pi b m}{M}}}\tag{5} Yb(k)=αn=0∑N−1e−Nj2πnkre−N2πkn×m=0∑M−1e2πmT~fde−jM2πbm(5)
上述式5我们忽略发送信号sm(n)s_{m}(n)sm(n)。由上可得∣Yb(k)∣|Y_{b}(k)|∣Yb(k)∣ 在k†=N−krk^{\dagger}=N-k_rk†=N−kr以及b~†=MT~fd\tilde{b}^{\dagger}=M\tilde{T}f_db~†=MT~fd取最大值。因为kr=⌊2r/(CTs)⌉k_r=\lfloor 2r/(CT_s)\rceilkr=⌊2r/(CTs)⌉以及fd=2v/λf_d=2v/\lambdafd=2v/λ,因此可以获得
r^≈(N−k†)CTs/2v^≈b†C/(2MfcT~) \color{Orange}{\hat{r}\approx(N-k^{\dagger})CT_s/2}\\ \color{red}{\hat{v}\approx b^{\dagger}C/(2Mf_c\tilde{T})} r^≈(N−k†)CTs/2v^≈b†C/(2MfcT~)
上述为OFDM 感知的基本原理但是理想很丰满现实却很残酷。由于多径存在会存在很多背景干扰以及OFDM无线系统中组帧时M一般很小多普勒的分辨率也是一个很大的问题,CP长度也会影响距离的估计范围。