1 问题描述
使用飞马SLAM手持激光扫描仪采集数据后,我们需要对数据进行解算处理。本文以SLAM100为例进行操作说明。

2 操作步骤
- 打开飞马无人机管家。点击SLAM应用里的处理程序。

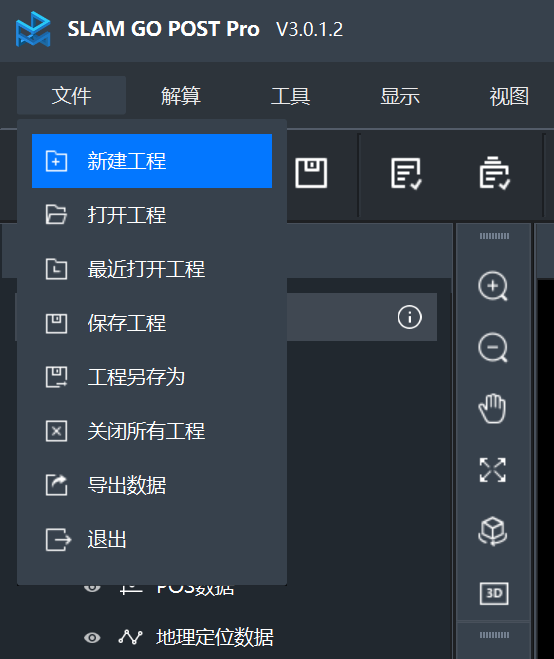
- 点击 文件 >> 新建工程。
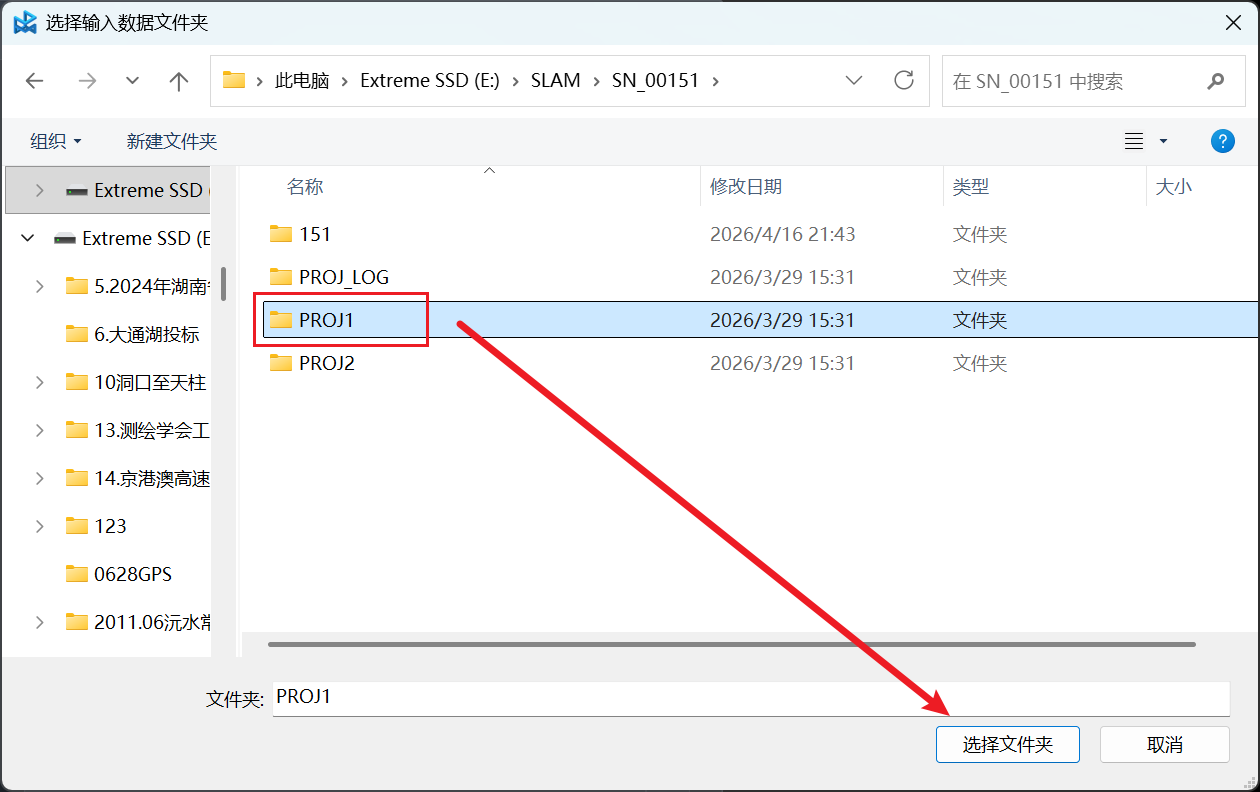
- 选择数据文件夹。
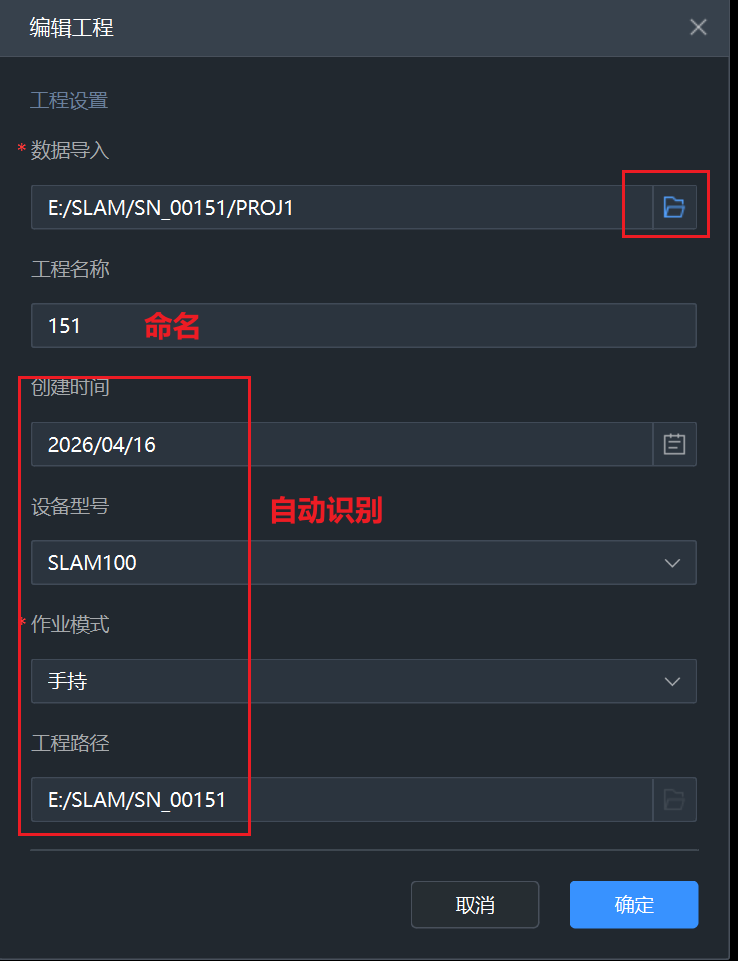
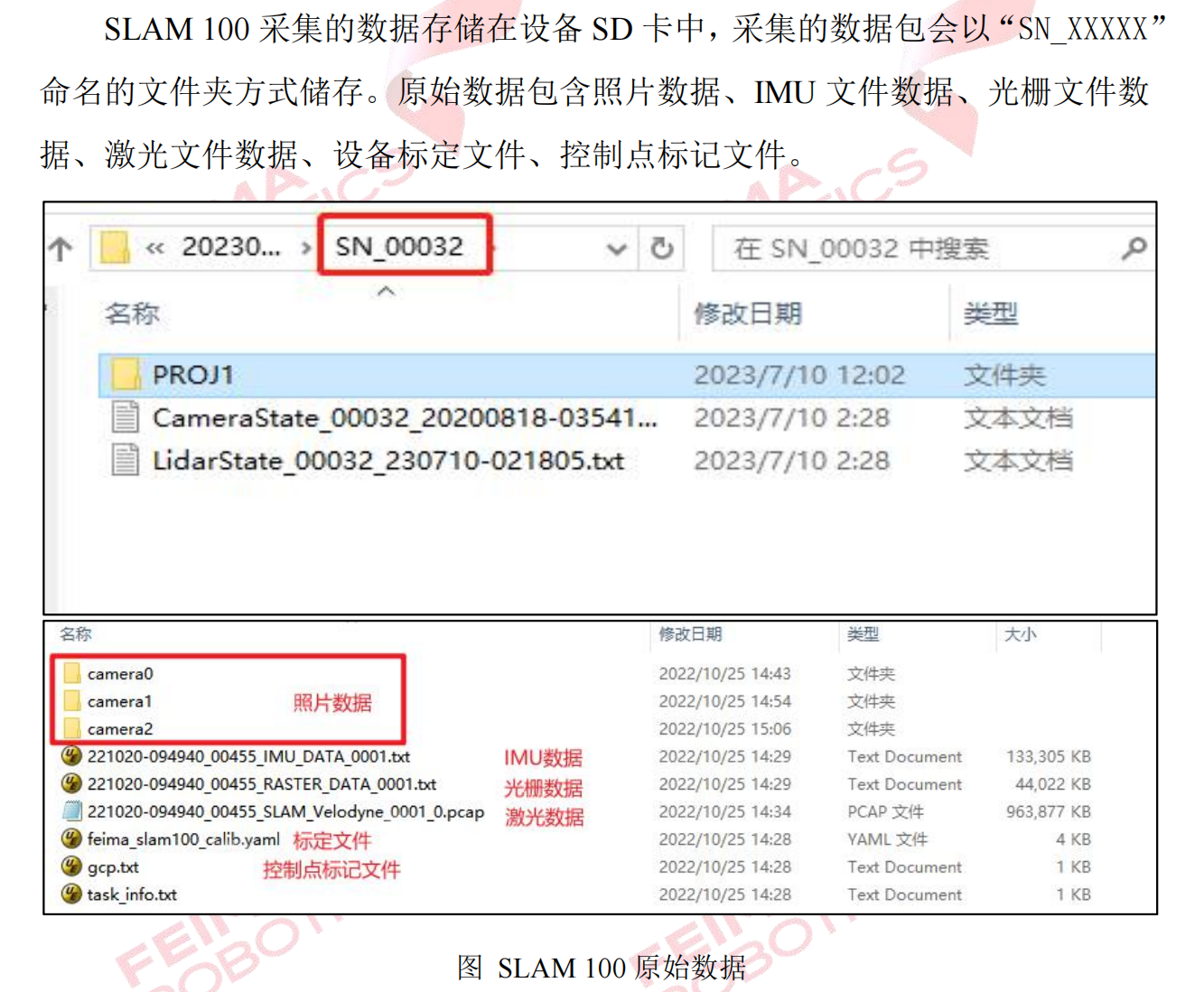
数据说明:
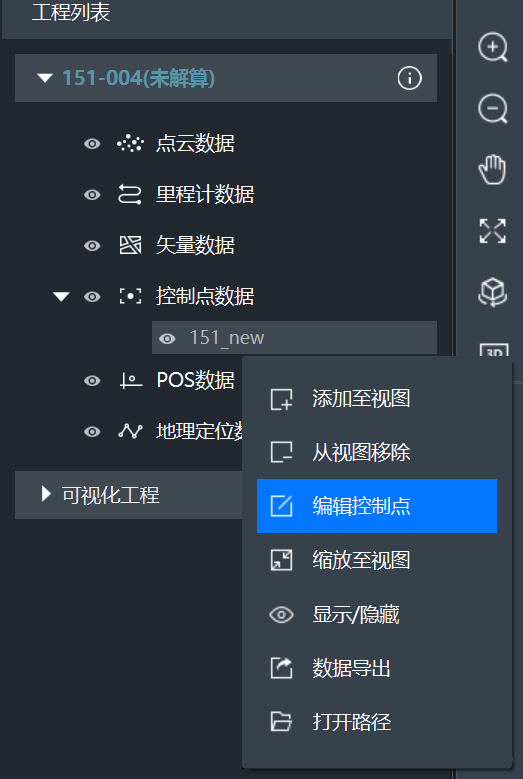
- 添加控制点数据。

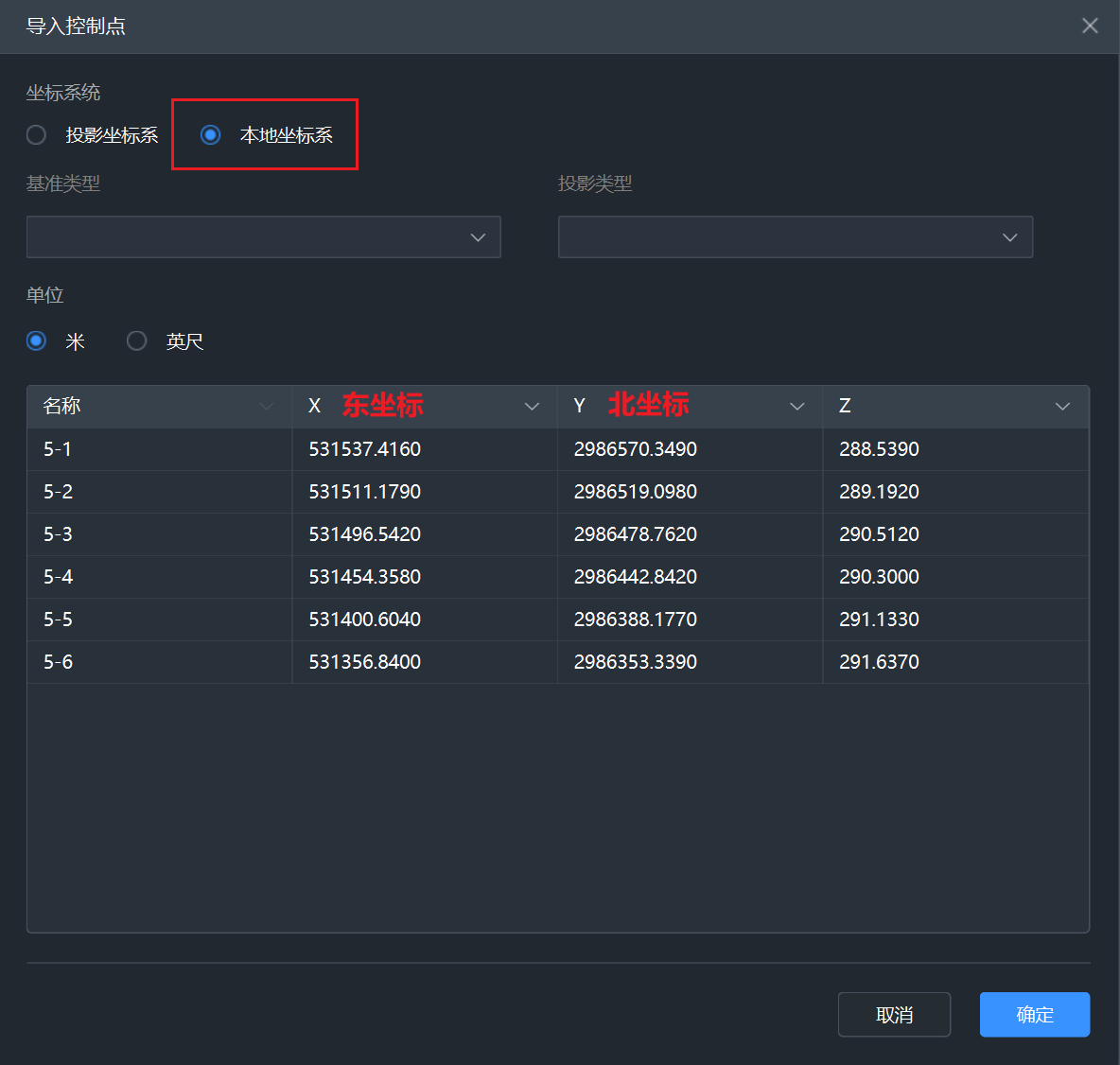
- 添加完成后,可编辑控制点进行查看,检查数据顺序是否一一对应。
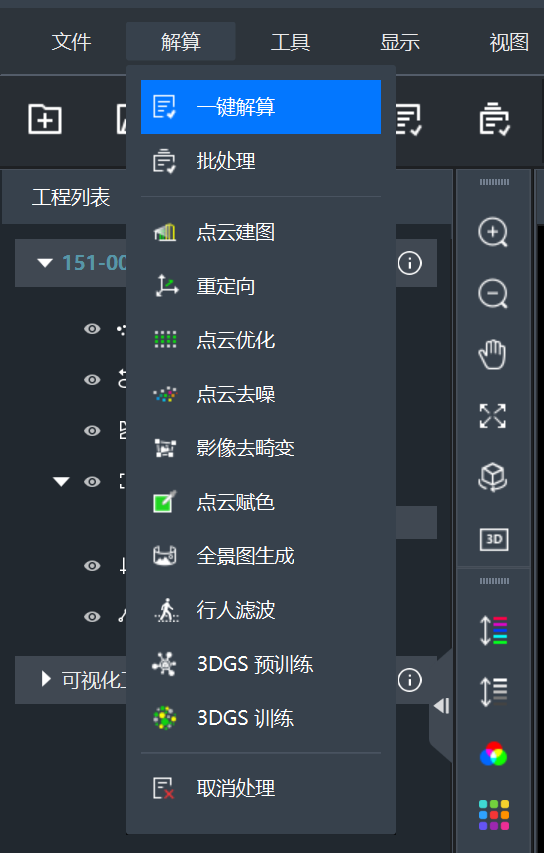
- 点击一键解算(也可以先一键解算,在添加控制点进行重定向)
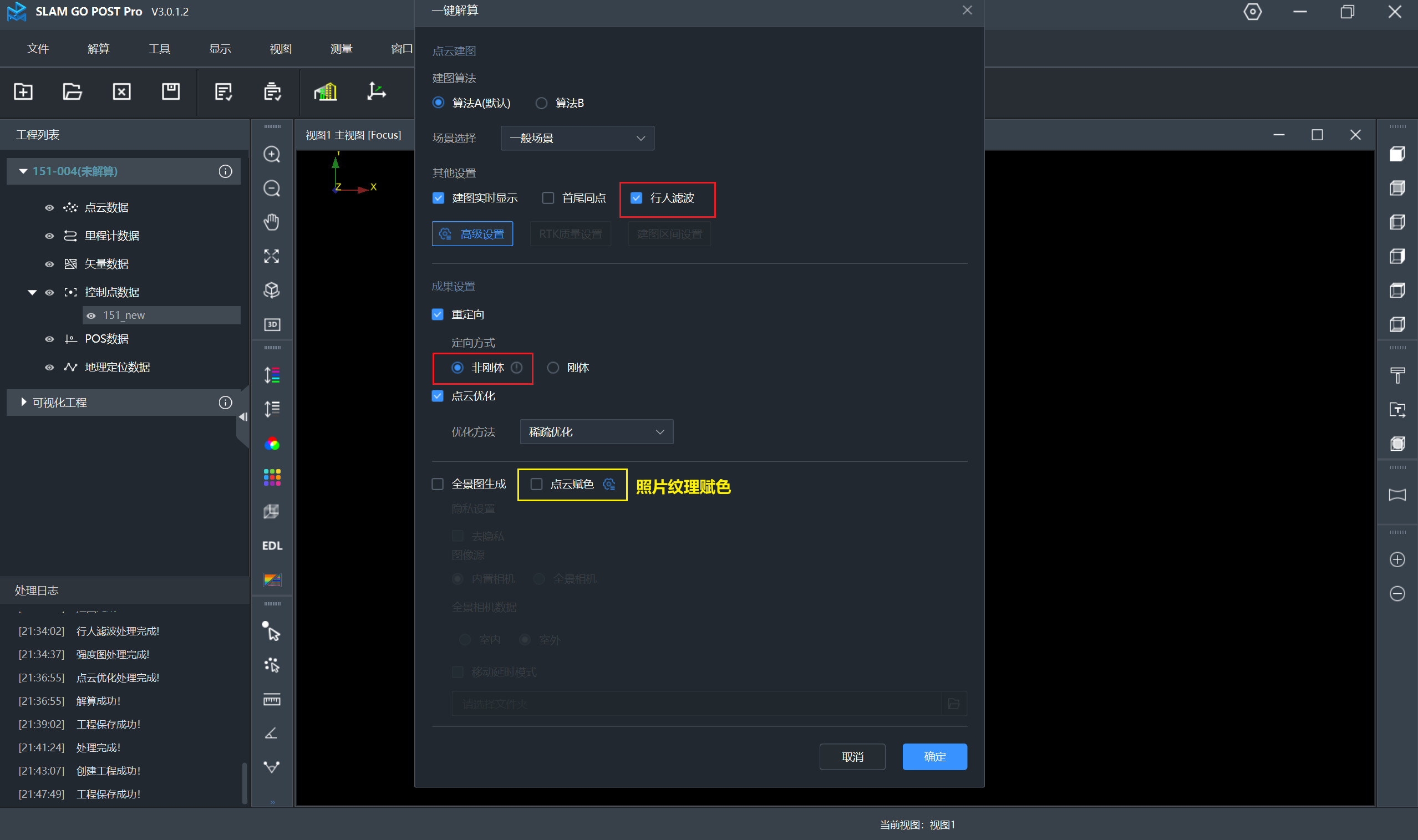
- 等待解算完成。
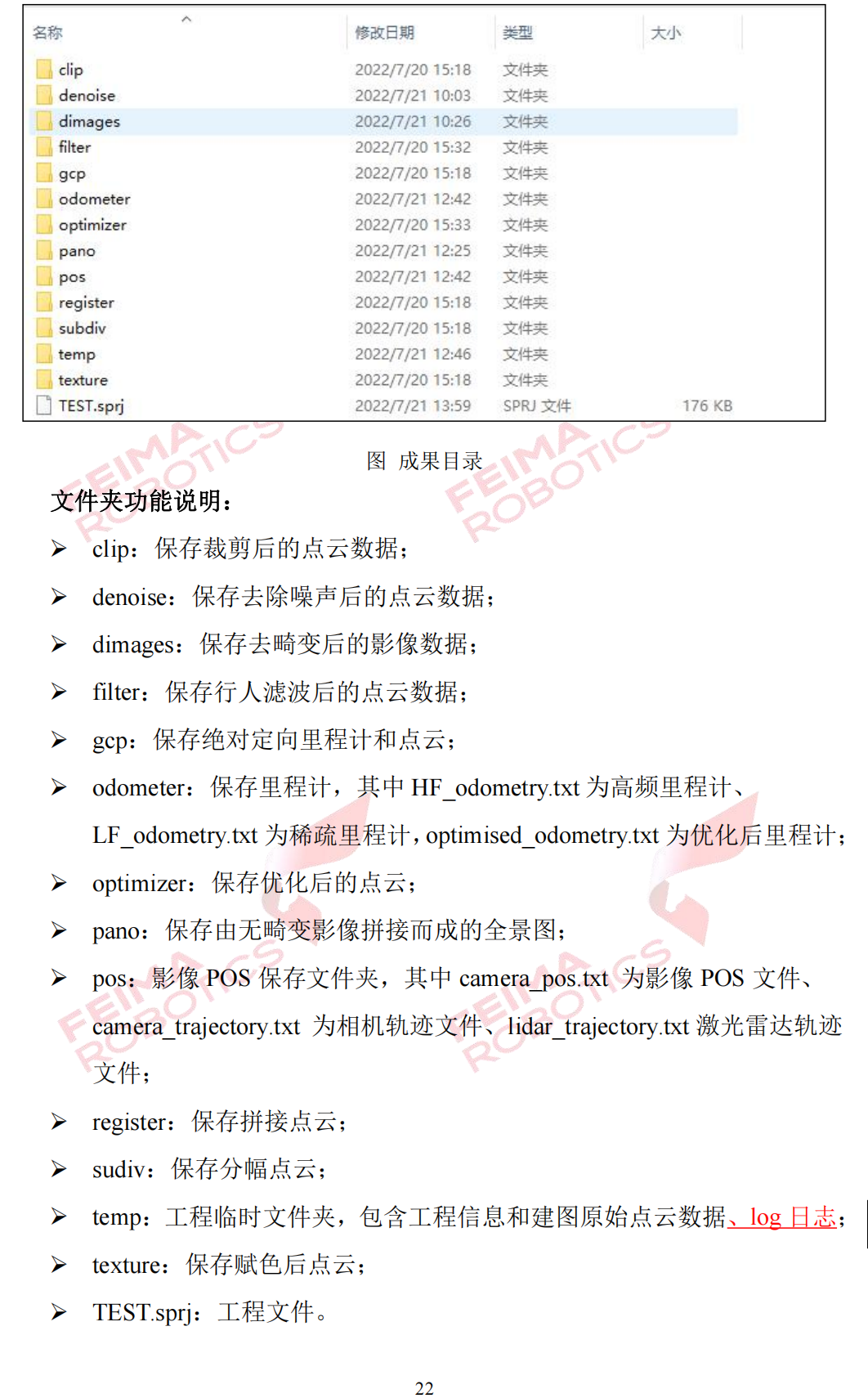
3 成果说明
4 常见问题
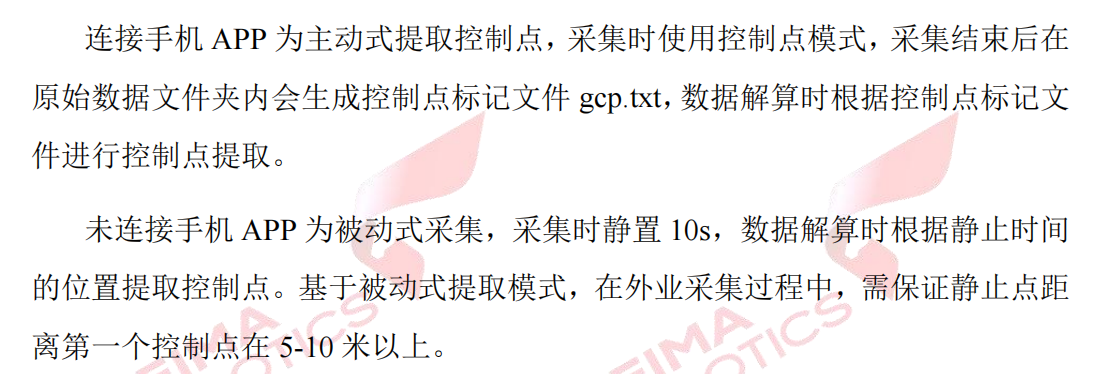
4.1 控制点提取
使用飞马SLAM手持激光扫描仪采集数据后,我们需要对数据进行解算处理。本文以SLAM100为例进行操作说明。