空地协同监测:GNSS-Denied UAV+UGV Collaborative Inspection
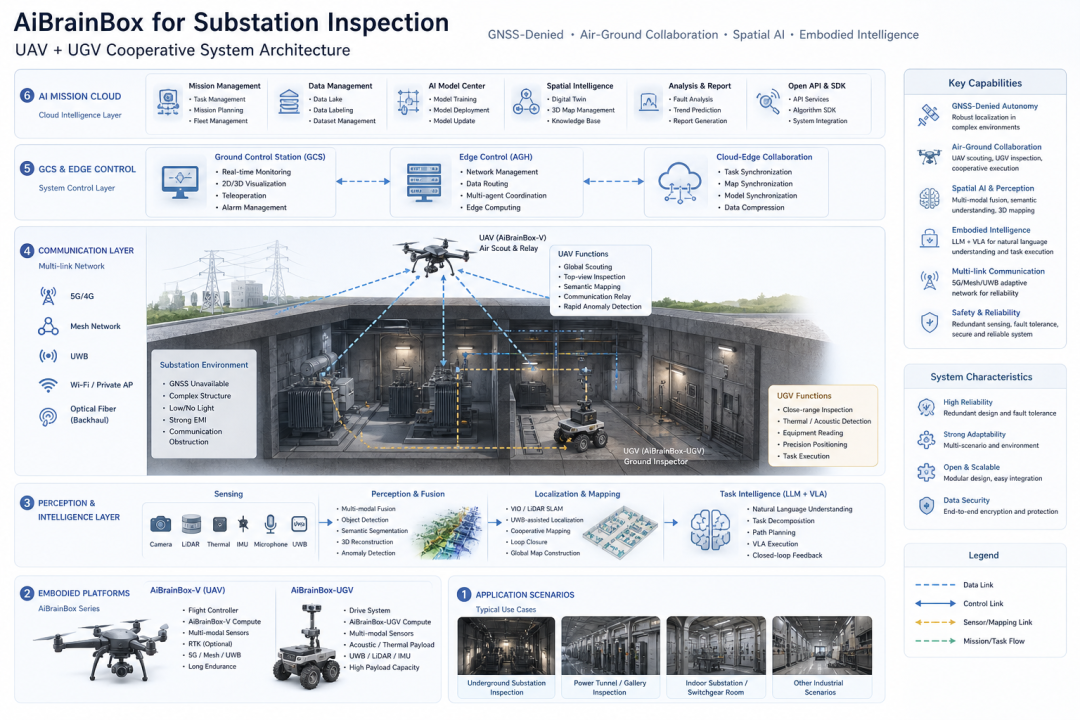
AiBrainBox-Substation

AiBrainBox-V Air Scout:空中侦察
AiBrainBox-G Ground Inspector:地面精检

*
AiBrainBox Relay Hub:协同中继

*
AI Mission Cloud
应用场景:
-
隧道
-
地铁
-
矿井
-
管廊
-
地下停车场
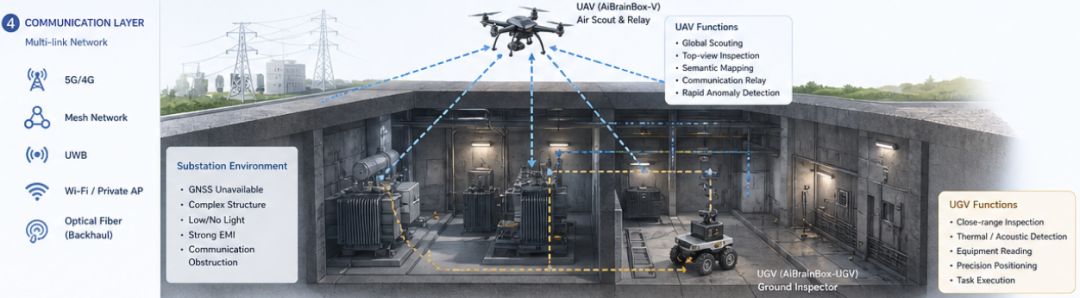
地下变电站 GNSS-Denied UAV+UGV Collaborative Inspection
包括:
1. 地下变电站
-
封闭空间
-
GNSS完全失效
-
光照复杂
-
EMI(强电磁干扰)
-
通信遮挡严重
2. 地下综合管廊电力舱
-
长走廊
-
多岔路
-
重复纹理
-
低光/无光
3. 室内变电站 / 配电室
-
空间狭窄
-
障碍密集
-
高精设备密布
核心任务
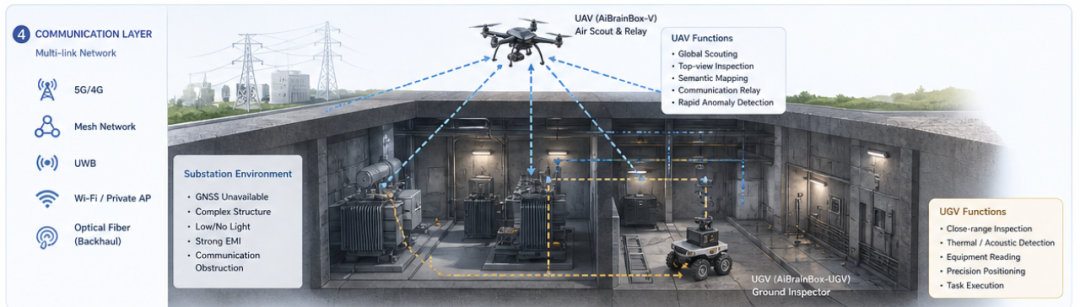
UAV负责-空中快速感知
-
高位巡检
-
顶部设备检测
-
通信中继
-
全局建图
UGV负责-地面精细执行
-
近距离检测
-
声学检测
-
热成像
-
精准复查
所以本质是:
UAV = Scout(侦察)
UGV = Operator(执行)
这是非常典型的空地协同范式。
技术挑战
Challenge 1:GNSS完全拒止
传统无人机:GNSS失效 = 基本"失明"
AiBrainBox-V / UGV 多模态融合:
-
VIO
-
LiDAR SLAM
-
UWB
-
Map Matching

Challenge 2:通信严重受限
地下环境:
-
5G衰减
-
Mesh多跳不稳定
-
墙体阻挡
UAV悬停充当:动态空中中继站
研究方向:
-
Relay placement
-
Dynamic topology optimization
-
Link adaptation
Challenge 3:空地时空对齐
难点:UAV和UGV看到的世界不同。
-
UAV:俯视
-
UGV:平视
跨视角统一地图:
Global Substation Coordinate Frame多机器人协同SLAM
核心:
时序同步:PPS/PTP
外参标定:UAV / UGV / AGH
Shared Map Frame
Challenge 4:任务分工
UAV适合:
快速巡检
-
扫描全局
-
异常初筛
-
热点检测
-
异物识别
全局语义地图
生成:
-
开关柜位置
-
变压器位置
-
通道结构
UGV适合:
近距离精检
比如:
-
局放声学检测
-
接头热异常
-
仪表读数
任务链:
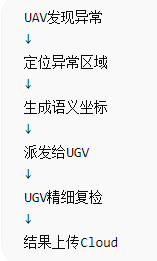
这是一个完整的协同闭环。
技术框架(AiBrainBox视角)
六层:
Layer 1:Embodied Layer
UAV:AiBrainBox-V
传感器:
-
多目
-
固态LiDAR(可选)
-
工业级IMU
-
RTK(地面可用时)
-
UWB
UGV:AiBrainBox-UGV
增加:
-
热成像
-
声学阵列
-
PTZ inspection head
Layer 2:Perception Layer
UAV:全局空间感知
输出:
-
Sparse 3D map
-
Semantic topology
UGV:局部精细感知
输出:
- Dense inspection detail
融合后:
Hierarchical Map
Layer 3:Localization Layer
采用双层定位:
Global Layer(UAV主导):全局地图构建
Local Layer(UGV主导):局部高精定位
通过:
Cooperative Relocalization
即:UGV在UAV地图中重定位。
Layer 4:Communication Layer
多链路:
Primary:Mesh
Secondary:5G
Backup:UWB ranging
关键算法:动态链路调度
根据:
-
RSSI
-
latency
-
packet loss
切换链路。
Layer 5:Task Intelligence Layer
LLM/VLA切入点。
任务:
"检查B2区域3号变压器顶部绝缘子"
系统拆解:
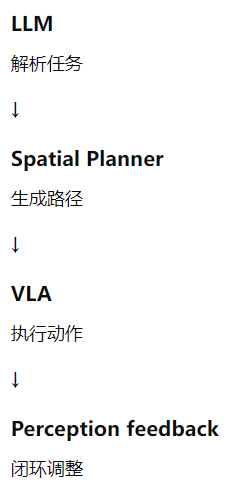
这是很完整的 embodied AI。
Layer 6:Mission Cloud
作用:
数据闭环:异常 → 标注 → 重训
数字孪生:地下变电站数字地图
知识库
设备语义知识:
-
变压器
-
母线
-
开关柜
支持语义推理。
科研方向
方向1:GNSS-denied Air-Ground Cooperative SLAM
方向2:Semantic Task Allocation
UAV发现 → UGV执行
方向3:Dynamic Relay Optimization
UAV作为通信中继
方向4:Substation VLA
自然语言:"检查温度异常区域"
机器人自主执行。
方向5:Multi-modal Fault Understanding
融合:
-
RGB
-
Thermal
-
Acoustic
-
LiDAR
进行故障理解。