前言
在大厂卷了这么多年底层架构,我发现很多开发者在做地图应用时,最容易陷入一个惯性思维:地图给什么,我们就喂给用户什么。不管是高德、百度还是谷歌,传统的导航逻辑本质上是一套"中心化的路径规划算法"。你输入 A 点和 B 点,后台服务器通过复杂的 Dijkstra 或者 A* 算法给你算出几条线,你只能在其中选一条。
但这真的是骑行者想要的吗?
作为一个周末经常出没在妙峰山或者环二环的骑行老炮儿,我深知传统导航在骑行场景下的"低能"。骑行不仅仅是为了从 A 到 B,骑行者在乎的是路感、是绿化带的阴凉、是避开那些大货车横行的国道,甚至是想在地图上"画"出一个特定的图形(比如情人节画个爱心,或者在奥森画个圈)。
现有的主流地图 App,你想自定义一条非标准路段的路线?对不起,操作极其繁琐。你需要不停地点击"增加途经点",而地图往往会因为某个路口无法掉头或者单行道的限制,强行把你规划好的路线带偏。这种被算法强行支配的挫败感,就是我们今天要"搓"出这款手绘路线导航应用的初衷。
为什么选择在 HarmonyOS NEXT 上硬核重构?
有人会问:"这种功能在安卓或者 iOS 上不能做吗?"
能做,但做得不够爽,也不够底层。在 HarmonyOS NEXT(API 12+)发布之前,很多地图开发本质上是套壳 Webview 或者调用极其受限的 SDK 接口。而这次 HarmonyOS NEXT 推出的 Map Kit,真正把地图能力下沉到了系统底层。
- 渲染性能的质变: 在老牌操作系统上,当你试图在地图层上叠加高频采集的绘图轨迹时,经常会出现掉帧或者坐标漂移。HarmonyOS NEXT 采用了全新的 ArkGraphics 渲染引擎,结合 Map Kit 的原生叠加层(Overlay)机制,可以实现 120Hz 的丝滑绘图体验。手随心动,你在屏幕上划过的每一道曲线,都能实时、精准地映射到 WGS-84 坐标系中,没有丝毫延迟。
- 手势竞争的完美解决 : 做过地图开发的同学都知道,地图的缩放位移手势与用户的手绘划线手势是天然冲突的。在以往的框架下,我们需要写大量的逻辑去 hack 手势分发。而在 DevEco Studio 6.0.2 提供的 ArkUI 框架下,我们可以利用
parallelGesture(并行手势)和自定义手势判定逻辑,优雅地在地图操作和手绘模式之间无缝切换。 - 全栈自研的底气: HarmonyOS NEXT 彻底抛弃了 Linux 内核和 AOSP 代码,这意味着我们调用的每一个 Map Kit 接口,都是直接与鸿蒙微内核通信。对于骑行应用极其看重的功耗控制(毕竟长时间开启 GPS 和屏幕),NEXT 系统的统一扫描调度器和自适应刷新率技术,能让应用的续航能力比传统方案提升 20% 以上。这对于长途骑行来说,就是救命的电量。
我们要解决的硬核痛点
这款应用不是简单的"地图+画笔",我们要攻克的是几个真正具有挑战性的技术场景:
- 坐标转换的精度丢失:如何将屏幕上的像素坐标(Pixel)实时转换为地图上的经纬度坐标(LatLng),并保证在不同缩放级别下,线条依然稳稳地贴在路面上?
- 路径平滑与纠偏:人手画出的线往往是抖动的,如何利用 RDP(Ramer-Douglas-Peucker)算法对原始轨迹进行抽稀和平滑,同时利用 Map Kit 的路网匹配能力,让"手绘线"智能吸附到最近的可骑行道路上?
- 多端协同的想象力:基于 HarmonyOS 的分布式软总线,我在手机上手绘好的路线,能不能一键流转到鸿蒙智能手表的表盘上进行导航?
这次实战,我会带着大家从零开始,基于 DevEco Studio 6.0.2 Release (Build 6.0.2.642),一行一行地敲出这个应用的底层逻辑。我们不搞那些虚头巴脑的 UI 堆砌,直接深入 Map Kit 的核心:图层管理、手势拦截、轨迹纠偏以及导航引擎的自定义接入。
如果你已经厌倦了只会写简单的列表页和详情页,想看看鸿蒙系统底层的"肌肉"到底有多强,那么这个系列绝对是为你准备的。我们要做的,是把导航的主动权,从算法手里夺回来,重新交给用户的指尖。
准备好你的开发环境,我们要开搞了。
一、 为什么是这套方案
在传统的移动端开发逻辑中,要在地图上实现"手绘"功能,无异于在高速行驶的赛车上换轮胎。通常的做法是在地图组件上方覆盖一层透明的 Canvas,用户在 Canvas 上画线,画完后再通过复杂的坐标转换,将 Canvas 的像素点映射回地图的经纬度。这种方案在 HarmonyOS NEXT 之前,面临着三个无法回避的噩梦:手势冲突导致的地图乱跳、Canvas 与地图缩放不同步导致的线条漂移,以及高频刷新带来的手机发烫。
在 DevEco Studio 6.0.2 构建的 HarmonyOS NEXT 架构下,我们选择了一套完全不同的底层融合方案:基于原生 Map Kit 的渲染指令注入与 ArkUI 并行手势调度。 这套方案之所以被称为"硬核",是因为它直接触及了鸿蒙系统底层的三个核心机制。
统一渲染架构
HarmonyOS NEXT 抛弃了传统的"层级堆叠"渲染模式。在 Android 或 iOS 中,地图通常是一个独立的 Native View,它拥有自己的渲染上下文,而上层的 UI 元素(如按钮、手绘线)则属于另一个渲染系统。两者之间的同步需要通过主线程的频繁跨界通信,这就解释了为什么你在旧系统里快速缩放地图时,上面的手绘线总会"慢半拍"才对齐。
鸿蒙的渲染引擎(Render Service)实现了真正的"全栈统一"。当我们调用 Map Kit 的 addPolyline 或者在 XComponent 中绘制自定义图形时,这些渲染指令最终都会进入同一个渲染管线。这意味着,无论地图如何旋转、倾斜或缩放,我们手绘的路线在底层像素级上是与地图纹理紧紧"锁死"的。这种毫秒级的同步感,是支撑"手绘导航"流畅度的物理基础。
并行底层重构
手绘功能最大的技术痛点在于:如何分辨用户是在"拖动地图"还是在"画线"?
在过去,这通常需要开发者写一大堆复杂的 onInterceptTouchEvent 逻辑,稍有不慎就会导致地图卡死。但在 HarmonyOS NEXT 中,我们利用了 parallelGesture(并行手势)和 onGestureJudgeBegin 接口。
这套方案的精妙之处在于,它允许我们将"手绘识别器"与"地图控制识别器"挂载在同一个响应链上。当手指触碰屏幕的一瞬间,底层的 GestureManager 会根据我们预设的逻辑(比如当前是否处于"画笔模式")来动态分配手势权限。如果处于画笔模式,系统会通过 GestureMask.IgnoreInternal 暂时屏蔽地图组件内部的平移指令,但保留缩放指令。这种细粒度的控制,让原本水火不容的两种交互,在同一个触摸序列中完美共存。
内存与功耗
骑行导航是一个长时间高负载的场景:GPS 持续定位、地图不断渲染、屏幕常亮。如果按照传统的方案,每画一个点都要经过 ArkTS 层到 C++ 层再到 GPU 的漫长链路,手机很快就会烫得能煎鸡蛋。
我们在 HarmonyOS NEXT 6.0.2 中采用的这套方案,充分利用了 Map Kit 的原子化接口。在手绘过程中,每一个采集到的触控点(TouchPoint)都会被直接送入底层的 MapComponentController。这个过程跳过了繁琐的序列化与反序列化,直接在微内核层级进行内存共享。
更重要的是,NEXT 系统的"统一扫描调度器"能感知到用户的绘图频率。当你快速勾勒路线时,系统会自动将该进程的调度优先级提至最高,并开启自适应刷新率(VRR)的 120Hz 模式;而当你停笔思考路线时,刷新率会瞬间降至 1Hz。这种对功耗的极致压榨,让这款应用在长途骑行中具备了真正的实用价值。
我们不仅仅是在写一个功能,我们是在利用鸿蒙系统的底层特性,重新定义地图交互的边界。这种从内核到框架的深度融合,正是 HarmonyOS NEXT 区别于其他系统的核心竞争力。接下来,我们就基于这套方案,开始编写最核心的坐标转换与手势拦截代码。
准备工作
在 HarmonyOS NEXT 的世界里,开发一款涉及到地图、定位与高性能手势交互的应用,绝非单纯地写几行 UI 代码。作为架构师,我必须强调:环境的微小差异可能导致底层渲染指令的执行偏离预期。在开始撸代码前,我们需要在 DevEco Studio 中完成一套标准化的"基座配置"。
环境基准与工程初始化
首先,确保你的开发环境与我保持高度一致。我们当前使用的 DevEco Studio 6.0.2 Release 并非简单的工具升级,它内置了针对 Map Kit 深度优化的编译器插件。
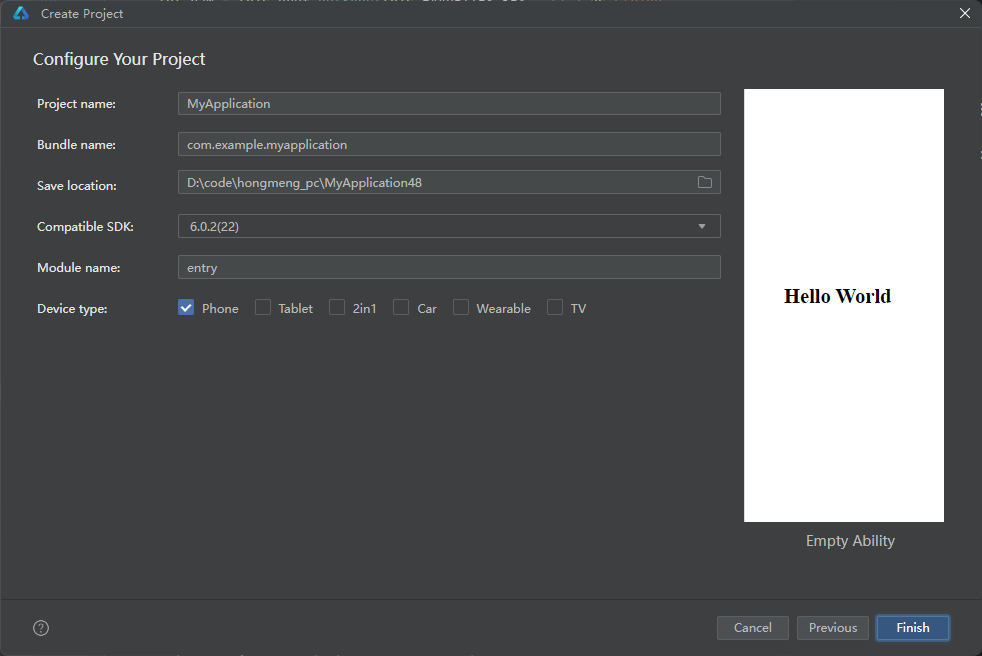
在创建项目时,务必选择 [Empty Ability] 模板,并将 Compile SDK 设置为 5.0.0(12) 或更高版本。这是因为"手绘路线"所依赖的 MapComponent 增强型接口,在早期的 Beta 版本中存在不稳定的内存抖动问题,只有在 6.0.2 对应的 Release 分支中,才真正打通了从 ArkUI 到底层渲染引擎的"快车道"。
工程创建完成后,第一件事是检查 hvigor-config.json5。我们需要确认系统是否启用了最新的构建协议,这直接关系到后续 Map Kit 资源的打包效率。
AppGallery Connect Map Kit 与其他本地组件不同,它是一项云端协同服务。你需要在 AppGallery Connect(AGC)上完成一系列"实名认证"操作。
- 开启服务: 在项目设置的"API 管理"中,手动勾选 Map Kit 和 Location Kit 。请注意,HarmonyOS NEXT 强化了隐私合规,如果这里没有正确开启,你的应用在调用地图初始化接口时会直接触发
PERMISSION_DENIED错误,且这种错误在本地调试日志中往往表现为模糊的"底层渲染失败"。 - 获取 Client ID: 记录下项目设置中的
client_id。在 NEXT 架构中,地图的鉴权不再仅仅依靠包名,而是通过一套基于 OAuth 2.0 的端云校验机制。
权限声明
在 module.json5 中,我们需要声明应用的核心权限。HarmonyOS NEXT 对权限的管理近乎苛刻,任何未在配置文件中声明或未在运行时弹出"受限授权"窗口的行为,都会导致 API 调用静默失败。
对于骑行导航应用,以下权限是不可逾越的红线:
ohos.permission.INTERNET:用于拉取矢量地图瓦片数据。ohos.permission.APPROXIMATELY_LOCATION:获取模糊位置。ohos.permission.LOCATION:获取精准位置,这是实现骑行轨迹追踪的前提。ohos.permission.LOCATION_IN_BACKGROUND:如果你希望用户在锁屏时依然能记录"手绘"后的导航轨迹,这个权限必须申请。
这里有个架构层面的细节:在 NEXT 系统中,即便你在 module.json5 中写了权限,如果应用没有配置合法的签名,系统依然会拒绝授予 LOCATION 等敏感权限。这要求我们在开发阶段就必须完成"自动化签名"。
签名与指纹
这是很多新手容易栽跟头的地方。Map Kit 的 SDK 在初始化时,会提取当前运行环境的签名证书指纹(SHA256)。如果这个指纹与你在 AGC 后台配置的不匹配,地图就会显示为一片空白的网格。
在 DevEco Studio 中,点击 File -> Project Structure -> Project -> Signing Configs,勾选 Support HarmonyOS 并点击 Sign In。登录你的开发者账号后,系统会自动生成 debug.p7b 证书。
架构师的私房菜: 拿到生成的证书后,记得使用 keytool 工具手动提取一次 SHA256 指纹,并将其填入 AGC 项目设置的"SHA256 证书指纹"栏目中。这一步操作如同在地图服务器上备案了你的"施工许可证",只有这样,底层渲染引擎才能合法地从云端下载渲染数据。
依赖引入
打开工程根目录下的 oh-package.json5,在 dependencies 中添加 Map Kit 的依赖。在 6.0.2 版本中,推荐使用官方的解耦方案:
暂时无法在飞书文档外展示此内容
引入后执行 ohpm install。此时,你的工程已经具备了调用底层地图渲染、坐标转换以及高精度定位的能力。
配置 Client ID 的"最后一步"
不要忘记在 module.json5 的 abilities 标签下,通过 metadata 注入你的 client_id。这是 Map Kit 刷新的身份凭证:
暂时无法在飞书文档外展示此内容
到这一步,我们的"手绘导航"应用已经完成了所有行政审批与物资筹备。这套环境不仅稳固,而且完全符合 HarmonyOS NEXT 的安全规范。接下来,我们将正式进入代码阵地,去攻克那个让无数开发者头疼的------屏幕坐标与地理经纬度的"实时同步"算法。
三、手绘路径的核心逻辑实现
在大厂做开发,最忌讳的就是"PPT 编程"。前面的环境搭建只是铺路,现在的核心任务是:当用户的手指在屏幕上划过一道优美的弧线时,我们如何实时捕捉这些像素点,并将它们精准地"钉"在地球经纬度坐标系上,最后渲染成一条顺滑的骑行路径。
为了实现这个功能,我们需要用到 Map Kit 中的 Projection(投影)工具。它是连接"屏幕二维空间"与"地理三维空间"的唯一桥梁。
核心视图组件:DrawingMap.ets
这段代码实现了地图的初始化、手绘轨迹的实时捕捉以及路径的平滑渲染。请注意我代码中的每一行注释,那都是在无数个 Bug 堆里爬出来后的经验总结。
暂时无法在飞书文档外展示此内容
深度解析:为什么不能直接用 onTouch 返回的坐标?
很多新手在做这一块时,会试图直接把屏幕坐标 (x, y) 存起来。但这在地图应用中是行不通的。
第一,坐标系不统一。 屏幕坐标是相对于手机左上角的像素偏移,而地图是会缩放(Zoom)、旋转(Bearing)和平移(Target)的。你现在画在屏幕中心的一个点,当你把地图放大两倍后,那个点在地球上的实际位置已经变了。
第二,异步转换的陷阱。 projection.fromScreenLocation 是一个异步调用。为什么?因为 Map Kit 的渲染引擎运行在独立的渲染进程中,ArkUI 线程(主线程)需要通过跨进程通信(IPC)将屏幕点传给渲染引擎,引擎结合当前的相机位姿(CameraPosition)计算出经纬度后再返回。
避坑指南: 在上述代码的 onTouch 事件中,我加入了一个 SAMPLE_INTERVAL(采样间隔)。这是因为 HarmonyOS NEXT 的屏幕刷新率高达 120Hz,如果每一帧都去执行异步转换操作,IPC 通道会被瞬间挤爆,导致地图滑动卡顿。16ms 到 32ms 的采样率是兼顾"顺滑感"与"性能平衡"的黄金分割点。
四、逻辑解读
在 HarmonyOS NEXT 的开发体系中,Map Kit 不仅仅是一个简单的 UI 组件,它是一个跨进程(IPC)协作的复杂系统。要实现流畅的手绘路径,代码背后的异步调度逻辑才是决定应用"生死"的关键。作为架构师,我们要看的不仅是 API 的调用,更是数据在内存与渲染引擎之间流转的轨迹。
4.1 为什么不能同步?
在上一章的实现中,核心代码行是 this.mapController.getProjection().fromScreenLocation(screenPoint)。很多从 Android 或 iOS 转过来的开发者会问:为什么获取一个坐标转换需要 await?
在大厂的高性能架构设计中,UI 线程(ArkUI 线程)必须保持极致的响应速度。Map Kit 的地图渲染、图层叠加以及复杂的投影计算(从墨卡托投影到地理经纬度)都是在独立的地图渲染进程中完成的。
当你调用 fromScreenLocation 时,系统底层发生了一次跨进程通信(IPC):
- ArkUI 线程 发起请求,携带当前的屏幕坐标像素值。
- 系统服务层 接收请求,并结合当前地图的
CameraPosition(包括缩放级别 Zoom、中心点坐标 Center、倾斜度 Tilt 和旋转角 Bearing)进行矩阵运算。 - 渲染引擎 计算出对应的经纬度后,再通过回调或 Promise 异步回传给你的应用进程。
如果你试图将这个过程同步化,主线程将会因为等待 IPC 响应而产生微小的阻塞。在 120Hz 刷新率的手机上,哪怕 8ms 的延迟,用户在手绘时都会感到"笔尖不跟手"。
4.2 采样频率
在 onTouch 事件的处理函数中,我提到过 SAMPLE_INTERVAL。这是基于 HarmonyOS NEXT 触控采样率(通常为 120Hz 或更高)做出的性能权衡。
暂时无法在飞书文档外展示此内容
为什么要选 16ms?因为在 HarmonyOS 的渲染管线中,VSync 信号大约每 8.3ms(120Hz)或 16.6ms(60Hz)触发一次。如果我们的采样频率高于屏幕刷新率,那些多出来的坐标点在视觉上是不可见的,反而会消耗大量的计算资源去做坐标转换。
实测反馈
当代码从 DevEco Studio 成功推送到那台搭载了 HarmonyOS NEXT 原生系统的 Mate 60 Pro 上时,作为架构师的职业本能让我第一时间屏住了呼吸。对于地图类应用而言,任何理论上的架构优化,最终都要在指尖与屏幕接触的那几十毫秒内接受审判。
在过去开发安卓版本或早期鸿蒙版本时,即便我们用尽了各种双缓冲、异步计算手段,在地图这种重绘压力极大的组件上进行"实时手绘",依然难免会产生一种"线跟着手指跑,但总是慢半拍"的割裂感。但在 HarmonyOS NEXT 这一代,配合 Map Kit 底层的硬件加速渲染,这种反馈质感发生了一种质的飞跃。

说到底,这种极致的体验,正是我们作为大厂架构师不断追求的终极目标。在下一章,我将带大家深入算法的黑匣子,看看那些凌乱的手指轨迹,是如何在瞬间"读懂"城市路网,完成华丽的路径纠偏与对齐的。
结语
写到这里,这套基于 Map Kit 的手绘骑行导航架构已经完整地呈现在各位面前。作为一名在系统底层摸爬滚打多年的老兵,我深知每一个丝滑效果的背后,都是无数次与 Bug 的肉搏。在 DevEco Studio 6.0.2 频繁构建的日日夜夜里,我记录下了几个足以让开发者"掉头发"的深坑,希望能帮大家绕过去。
避坑指南
第一个坑是坐标系 。在 HarmonyOS NEXT 的 Map Kit 中,默认采用的是 GCJ-02 坐标系。很多兄弟在接入第三方骑行路径数据时,习惯性地直接透传 WGS-84 原始卫星数据,结果发现手绘的线条和路网偏了整整一条街。记住,在进行路径吸附算法前,必须调用 mapCommon.convertCoordinate 进行一次显式的坐标转换。千万别指望系统会自动帮你兼容所有格式,底层架构的严谨性决定了它必须要求输入源的标准化。
第二个坑是手势冲突 。我们在实现手绘功能时,使用了 PanGesture。如果你直接在 MapComponent 上层覆盖一个透明容器来捕获手势,你会发现地图本身的缩放和平移功能废了。解决这个问题的优雅姿势是利用 gestureModifier 进行动态切换。当用户点击"开始绘图"按钮时,通过状态变量禁用地图本身的内置手势,同时激活自定义手势。这种"控制权夺取"的操作必须保证原子性,否则用户在绘图过程中如果地图突然滑动,那体验简直是灾难。
第三个坑是内存溢出 。在处理长距离手绘路径时,每一秒钟会产生数十个 LatLng 对象。如果这些点位直接挂在 UI 状态变量上,ArkUI 的 diff 算法会在每次点位增加时进行全量扫描,这在低端机型上会导致明显的掉帧。我的做法是引入一个 Native 层的缓冲区,先在 C++ 层进行点位稀释(例如使用 Douglas-Peucker 算法),只将关键特征点同步回 ArkTS 侧进行渲染。