从"传感器融合"升级为"多机器人约束融合系统"-Factor Graph 多约束融合
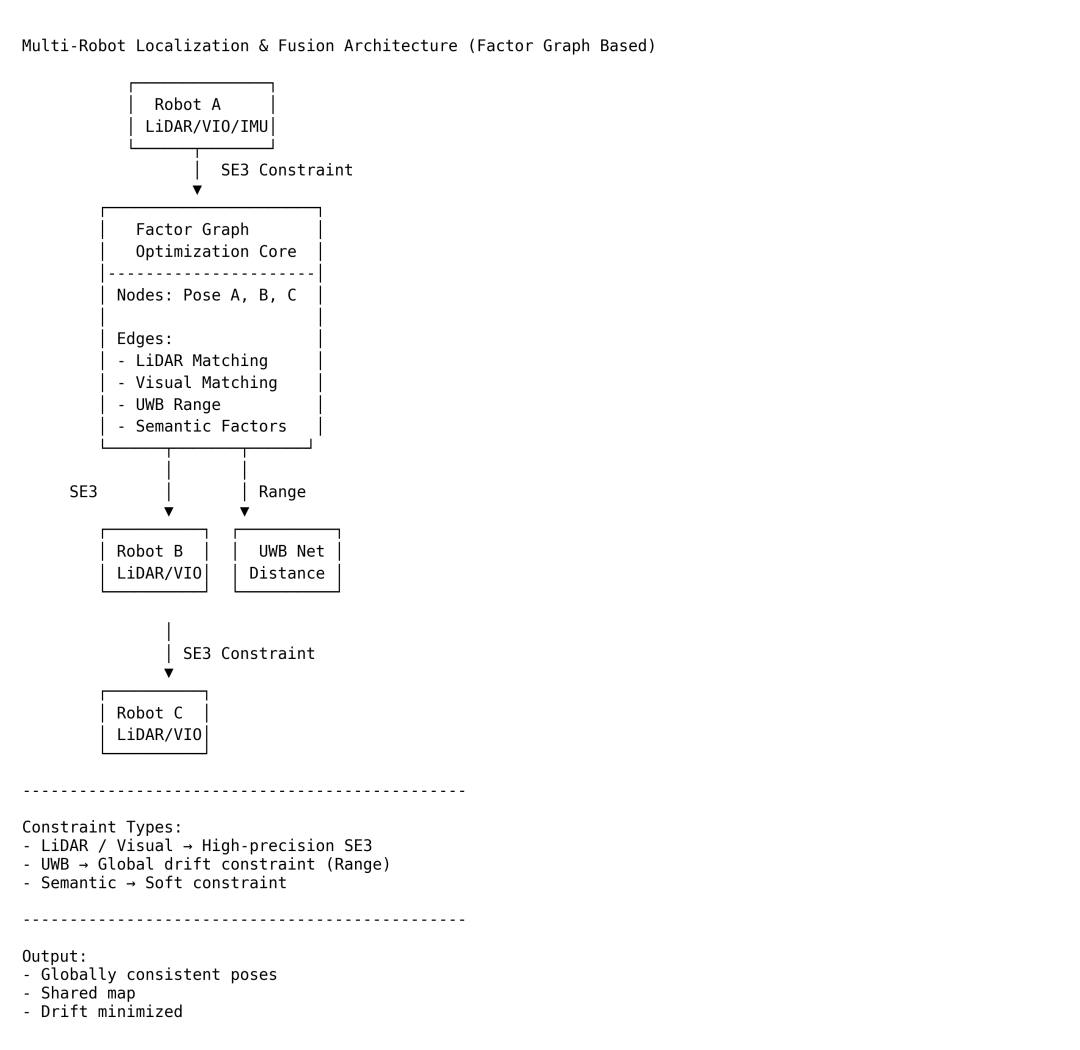
多机器人融合定位系统架构图
包含:
-
Factor Graph结构
-
各类约束关系
-
UWB/视觉/LiDAR如何融合
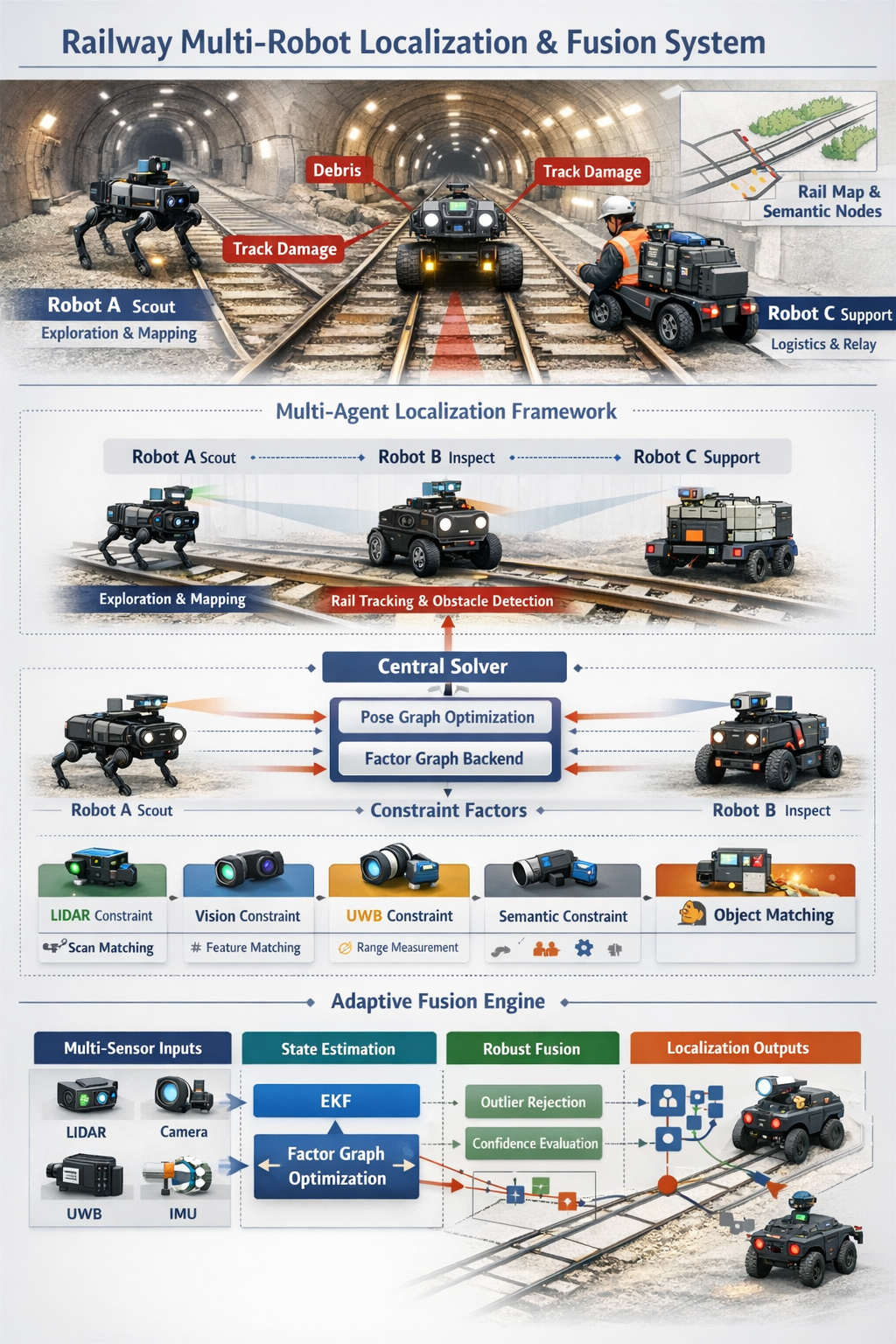
核心技术架构 / 协同定位引擎
采用基于因子图的多机器人融合定位框架,实现激光、视觉、UWB与语义的多约束联合优化
We adopt a factor-graph-based multi-robot localization framework with multi-constraint fusion (LiDAR, vision, UWB, and semantic).
"核心价值"
🔥 1. "约束融合"
- Constraint Fusion(多机 + 图优化)
🔥 2. UWB的正确定位
✔ UWB = Range Constraint(辅助)
❌ 不是主定位
🔥 3. 支持"异步、多源、不完备数据"
Factor Graph 最大优势:
-
不需要同步
-
不怕丢数据
-
可以后端优化
👉 非常适合地下环境
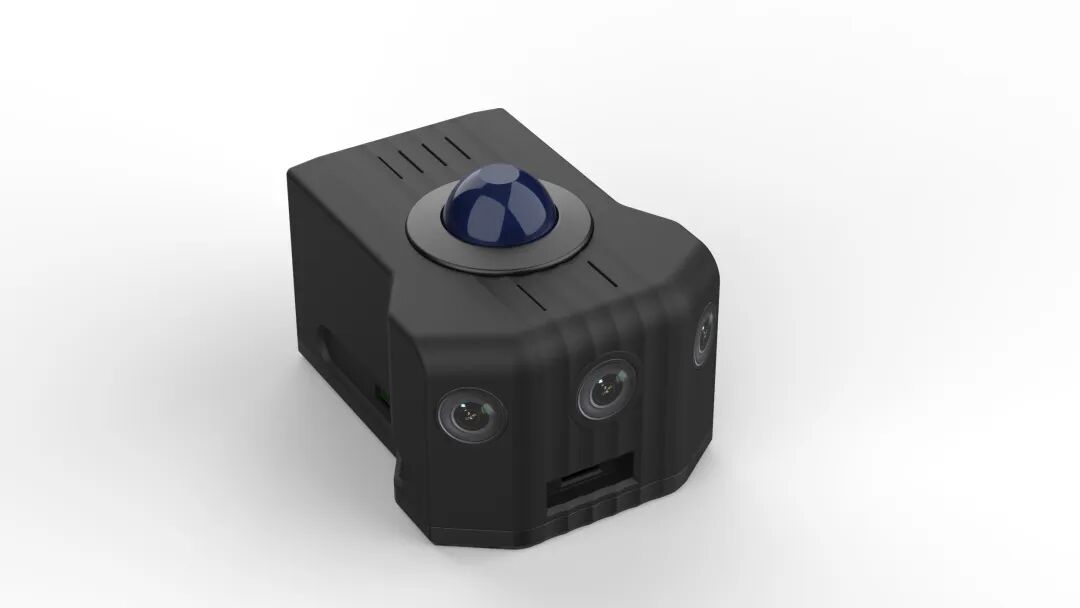
1️⃣ 单机(UGV / 机器狗)-AiBrainBox-UGV
-
激光雷达(主几何)
-
三目视觉(语义 + VIO补偿)
-
工业级IMU(短时稳定)
👉 这套组合本质是:
✔ LiDAR主导 + Visual辅助 + IMU桥接
在GNSS拒止环境下:
| 能力 | 评价 |
|---|---|
| 短时定位 | 很强 |
| 中期稳定 | 可控 |
| 长期漂移 | 依赖回环 |
👉 结论:
✔ 单机完全够做"可靠自主"
🚀 多源约束融合(Multi-Constraint Fusion)
1️⃣ 三类约束
🔷 A. 几何约束(主)
来源:
-
LiDAR Scan Matching
-
Visual Feature Matching
👉 输出:
- 相对位姿(SE3)
✔ 精度最高
✔ 作为主约束
🔷 B. 距离约束(辅助)
来源:
- UWB
👉 输出:
- 距离约束(range factor)
✔ 抗漂移
✔ 但不能独立使用
🔷 C. 语义约束
来源:
- YOLO / CLIP
例如:
-
同一个设备
-
同一个轨道段
👉 输出:
- 软约束(semantic factor)
✔ 非常关键(行业领先点)
"协同定位引擎"
✔ Multi-Robot Localization Engine
🔥 建议1:定位模型升级
从:
单机SLAM
升级为:
✔ Multi-Agent SLAM(Factor Graph)
🔥 建议2:UWB定位角色重定义
从:
测距模块
升级为:
✔ 全局漂移约束源
🔥 建议3:做"2.5D模式"(非常实用)
-
XY 强约束
-
Z 弱约束
-
roll/pitch 来自IMU
👉 适合:
-
铁路
-
地下通道
-
仓储
🔥 建议4:加入"相对观测触发机制"
例如:
-
两机器人距离 < 10m
-
自动触发:
-
LiDAR匹配
-
视觉匹配
-