在具身智能与机器人精细操作领域,纯视觉模型在柔性抓取、精密装配等场景存在明显局限,难以判断力度、滑移与接触形变,易造成物体损坏或任务失败。前沿研究证实,触觉感知 可有效弥补视觉短板,而Robotiq TSF-85 触觉指尖传感器正是实现视觉 --- 触觉融合、支撑模型性能提升的关键硬件方案。
纯视觉瓶颈:薯片实验揭示触觉刚需
视觉 - 语言 - 动作模型在薯片拾取等精细任务中,难以区分稳定握持与挤压破碎。只有触觉信号能提供压力、振动、力 / 扭矩反馈,修正视觉估计误差,保障操作安全与稳定。
Robotiq TSF-85 触觉传感器指尖 :把精准触觉赋予机器人
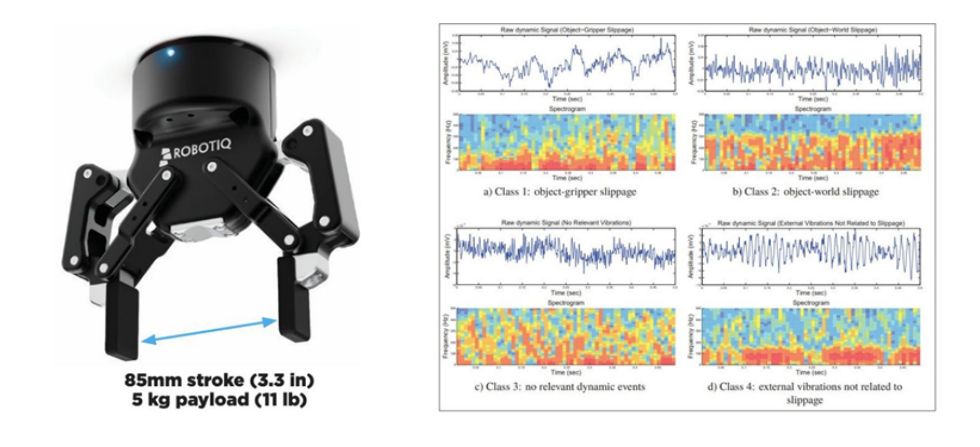
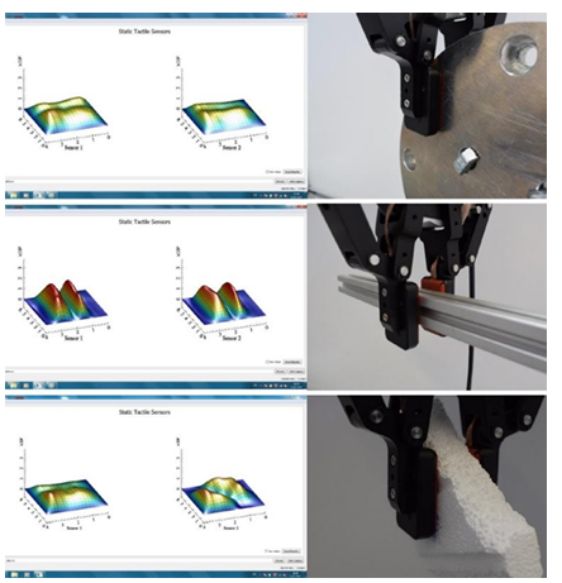
TSF-85搭载 4×7 触觉阵列、1000Hz 高频采样与 IMU 本体感知,可直接适配 Robotiq 2F-85 二指电爪,即插即用,无缝对接科研与工业平台。
· ✅ 压力分布感知:实时呈现接触面受力,适配易碎、异形、柔性物料
· ✅ 微滑移提前检测:毫秒级预警,动态调整夹持力,有效提升任务稳定性
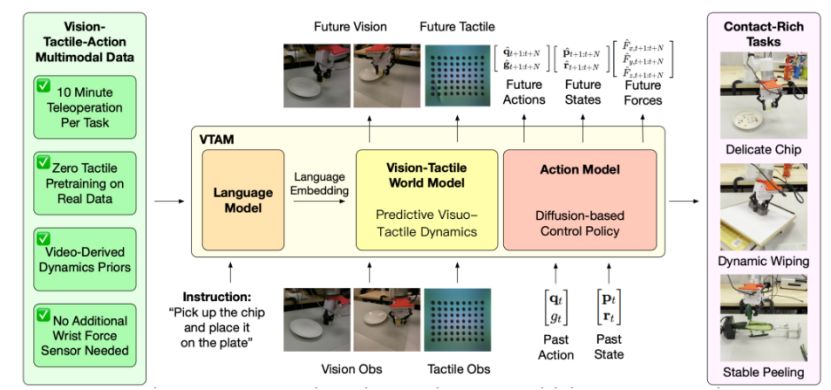
· ✅ 多模态数据输出:为 VTAM 等视觉 - 触觉融合模型提供高质量训练样本
· ✅ 工业级可靠:兼容 ROS2,部署便捷,适用于具身智能、精密装配、柔性抓取
视觉 + 触觉融合:模型效率与成功率双提升
融合TSF-85 触觉传感器指尖数据的VTAM,在接触密集型任务中表现更稳定,可用更少演示数据达到目标效果,降低训练成本,提升部署效率。
***资料来源:***arXiv:2603.23481
TSF-85 触觉传感器指尖让触觉信号深度参与策略学习,而非简单附加,使机器人从 "看得到" 升级为 "摸得准、握得稳"。
【结语】
TSF-85 触觉传感器指尖以高性能硬件落地前沿触觉研究成果,打通视觉 --- 触觉双模态数据闭环,为具身智能、精细操作、自动化产线提供可靠支撑。助力科研与工业客户快速实现机器人智能化升级。
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询sales@cnbestec.com