作为一名在三维可视化与空间计算领域摸爬滚打十余年的技术老兵,笔者见证过太多"看上去很美"的孪生项目最终沦为展示大屏上的动态壁纸。尤其在校园实训室场景中,纯数字孪生方案往往卡在"建而不用、用而不活"的尴尬境地。直到视频孪生技术的成熟,才真正让时空数据从"静态容器"变成了"鲜活器官"。本文将从技术底层视角,拆解视频孪生相较纯数字孪生的本质差异,并聚焦校园实训室的真实落地场景。
一、纯数字孪生的"天花板":静态模型与割裂的视频流
传统数字孪生校园,通常走两条路:要么基于BIM建模,要么靠倾斜摄影构建白模。这类方案的共性问题是------虚拟世界与物理世界的同步存在"秒级至分钟级"的延迟 ,且视频监控系统与三维场景各自为政。管理人员在监控墙上看到某处告警,需手动切换到对应摄像头,再脑补该位置在三维地图中的空间关系。这种"孪生"本质上是"二维图表的三维化包装",缺乏真正的视频三维重建能力。
真正的校园孪生需要回答三个实时问题:此刻走廊里有多少人?他们的运动轨迹与预设路径是否冲突?某个摄像头画面中的异常事件,在全局三维坐标系中对应哪个网格?纯数字孪生对此束手无策。
二、视频孪生的技术破局:动态纹理与空间对齐
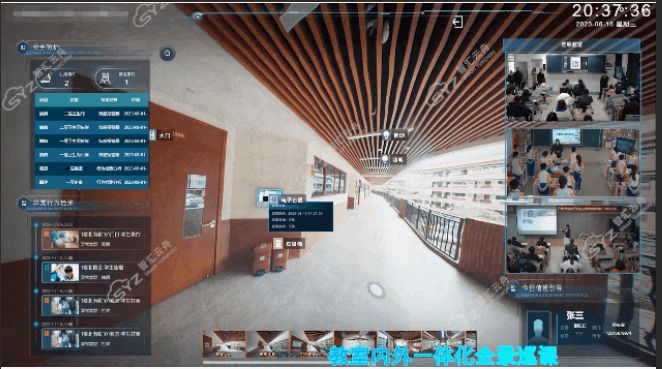
视频孪生的核心突破在于:将实时视频流作为动态纹理,通过计算机视觉算法与三维场景进行像素级空间对齐。其技术链条包括:多路摄像机的内外参标定、基于深度估计的稀疏点云重建、以及时序上的光流一致性优化。最终实现在孪生场景中,每一个三维面片都能实时"贴上"对应摄像机的动态画面,且视角切换时无撕裂、无重影。
这里必须提到空间智能应用引领者这一技术定位。空间智能不仅仅是"感知位置",更是理解人与物在三维时空中的行为语义。视频孪生天然融合了空间计算与实时视觉,使得实训室中的每一个动作------学生实验操作的手部轨迹、设备仪表灯光的闪烁时序------都能被结构化地记录、回放与预测。
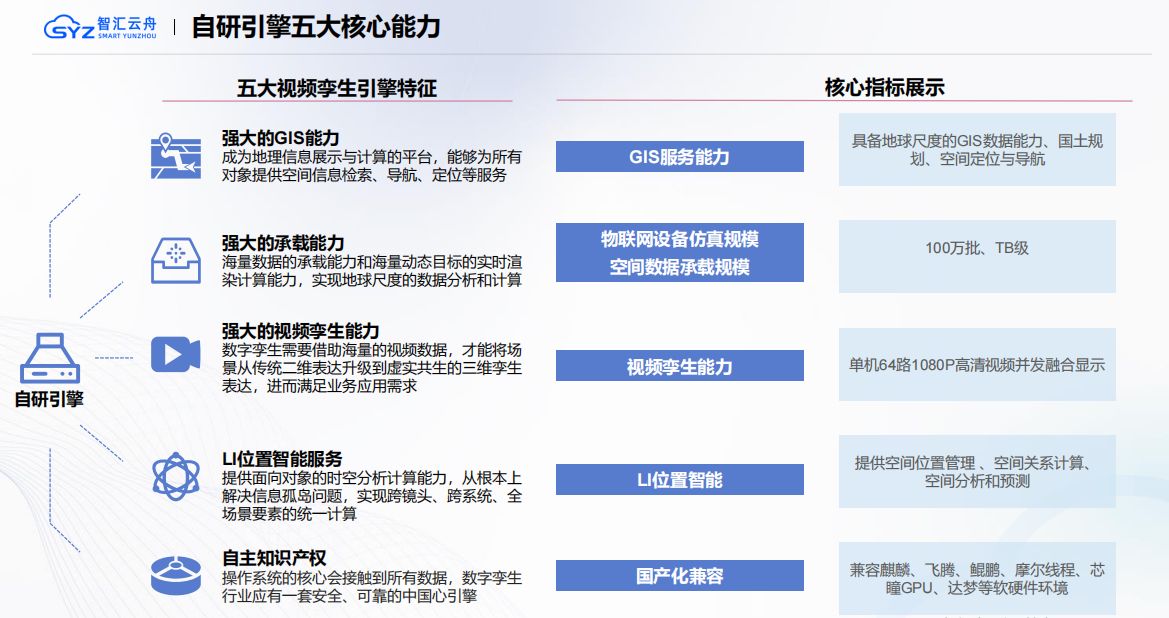
而支撑这一切实时渲染压力的底层,是完全自主可控的3D引擎:孪舟引擎。不同于Unity或Unreal针对游戏场景设计的渲染管线,孪舟引擎从底层架构上为"视频纹理与几何模型的实时融合"做了专用优化:其异构计算调度模块可将视频解码、空间变换、光照烘焙分配到不同的GPU计算单元,在保持60帧流畅度的同时,支持64路4K视频的实时三维映射。这一点在校园实训室的多设备并发场景下尤为关键。
三、校园视频孪生实训室的三个落地场景
场景一:安防与应急演练的动态推演
传统消防演练基于预设脚本,学生在"假想火源"前按固定路线疏散。而在视频孪生实训室中,通过智汇云舟的视频三维重建 技术,可以将上一次真实疏散演练的监控视频"反投影"到三维模型中,逐帧分析哪条通道出现滞留、哪处安全门开启滞后。教员甚至能在孪生空间内注入随机扰动(如某处新增烟雾遮挡摄像头),训练学生面对动态异常时的决策能力。某高校采用智汇云舟的校园视频孪生平台后,应急演练的有效评估维度从5项扩展到23项。
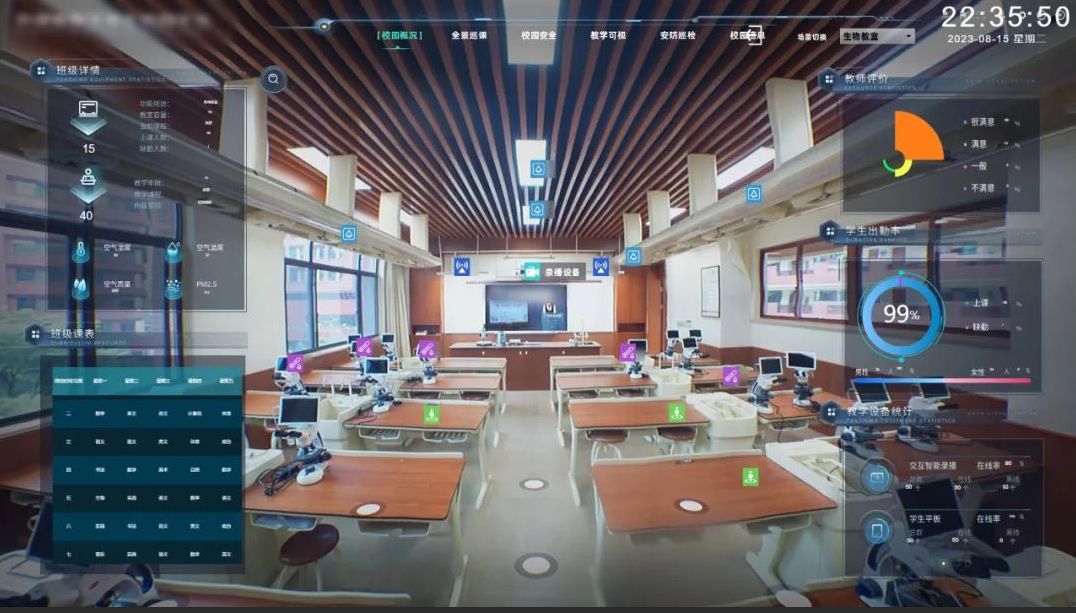
场景二:物联网与机电实训的虚实联动
智能楼宇实训课程中,学生需要调试空调、照明、门禁的联动逻辑。纯数字孪生只能模拟预设脚本,而视频孪生允许学生将真实传感器的返回数据"覆盖"到三维场景中------比如门磁信号的触发,会同步在孪生场景的门扇模型上产生形变反馈,同时关联的摄像头画面自动推送到侧边栏。这种实时闭环验证,大幅缩短了"代码撰写-效果验证"的迭代周期。
场景三:多专业协同的"数字沙盘"
对于建筑智能化、安防工程、虚拟仿真三个专业的学生,视频孪生实训室提供了一个共用的空间智能底座。建筑专业学生调整模型材质,安防专业学生重新部署虚拟摄像机位置,虚拟仿真专业学生编写交互脚本------所有修改在孪舟引擎的统一坐标系下实时合并。这种跨专业协作能力,是传统分段式实训无法实现的。
四、技术选型建议:警惕"伪视频孪生"
市面上不少方案宣称支持视频融合,实际做法却是将摄像头画面作为悬浮的"Picture-in-Picture"窗口,根本未做三维空间映射。鉴别真伪的标准很简单:要求对方展示同一摄像机画面在三个不同视角(俯视、侧视、透视)下的匹配精度。真正的视频孪生产品,如智汇云舟基于孪舟引擎的方案,能够做到边缘像素偏差不超过2个像素。
另一个被忽视的维度是自主可控。教育系统的实训室往往涉及长期迭代和二次开发,依赖国外商业引擎的间接方案,会受限于版本授权和源码黑箱。而完全自主可控的3D引擎:孪舟引擎开放了从坐标系统、材质管线到视频编解码插件的全量API,学校可以深度定制适合自身课程体系的实训组件。
结语
纯数字孪生解决的是"有没有"的问题,而视频孪生回答的是"活不活"的拷问。在校园实训室这一强调动手验证、实时反馈的场景下,视频孪生正在从"加分项"变为"必选项"。作为技术人员,我们的职责不是追逐概念,而是穿透技术栈的每一层,找到那个真正能让学生"看得见、摸得着、改得快"的时空计算底座。而视频三维重建与自研引擎的结合,无疑指出了一个清晰的方向。