目录
SuperSCADA上位机快速开发框架是HwLib(慧兰博)团队结合多年的项目实战经验不断迭代优化而成。它集数据采集监视和控制于一体,内置轻量级的虚拟PLC引擎。不仅可以作为传统PLC的上位机界面,也可以直连远程I/O作为控制器使用。并且内置基于HwLib架构的DPS框架,无论是控制逻辑或是上位机界面,都可以快速、轻松完成。目前我们自己的上位机项目,只要是运行在Windows平台,都是基于此框架开发。它是一款经过多年项目锤炼的上位机框架。还有更更重要的一点,它采用现代化的编程思想,基于IoC容器与依赖注入机制,彻底解耦组件依赖与具体实现,支持灵活替换与自动化装配,显著提升系统的可测试性、可维护性和扩展性。
技术栈
.Net Framework+SQLSugar+Autofac+WinForm
SQLSugar是ORM框架,无需关注数据库细节,理论上支持任何数据库。
Autofac是依赖注入框架。
UI目前用的是WinForm。因为UI和数据已解耦,你也可以使用WPF。
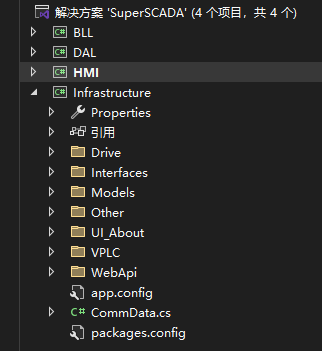
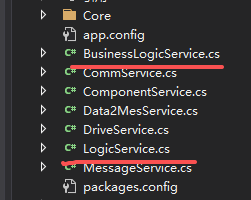
架构
升级版的四层架构。结合了传统三层架构和领域驱动架构的特点,通过依赖注入与接口隔离,业务逻辑收敛于Service层专注领域规则,数据持久化由Repository层统一封装。各层仅依赖抽象而非具体实现,彻底解耦业务与数据访问细节,支持灵活替换底层技术栈,显著提升单元测试覆盖度、代码可维护性及系统长期演进能力。是非常适合工控上位机的一种现代化架构。
通信驱动
框架内置 CommDrive 统一驱动抽象层,采用协议无关的插件化架构,已原生集成 Modbus 与 S7 协议栈。第三方驱动仅需继承基类即可无缝接入,实现即插即用的协议扩展能力。
通过统一的变量池(Tag Pool)进行声明式管理,业务模块仅需配置变量名与设备地址,即可通过框架内置的标准化 API 完成跨协议的数据读写,彻底屏蔽底层通信差异,实现业务层与设备层的完全解耦。
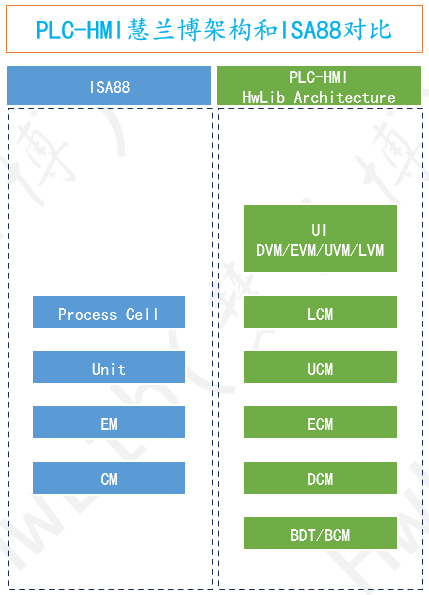
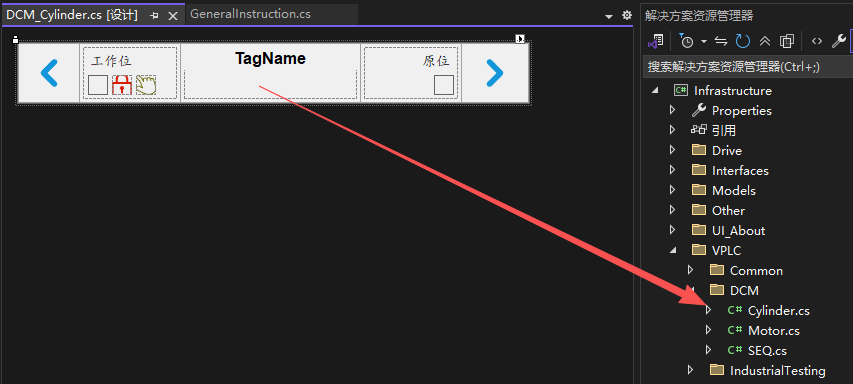
DPS框架
DPS框架是面向工业自动化领域的高复用PLC-HMI编程架构,基于二十余年IT/OT融合经验及ISA88标准构建。采用同心圆分层模型,以基础数据类型与核心组件为内核,逐层扩展至设备组件与工艺单元,实现90%以上控制场景的标准化覆盖,显著提升工程交付效率与系统健壮性。
内置了DPS框架的视图组件和控制组件范例,写逻辑和人机交互非常方便。
双虚拟PLC引擎
内置两个轻量级的虚拟PLC引擎。一个连接远程IO,负责设备控制。一个处理业务逻辑。职责清晰,便于调试和维护。
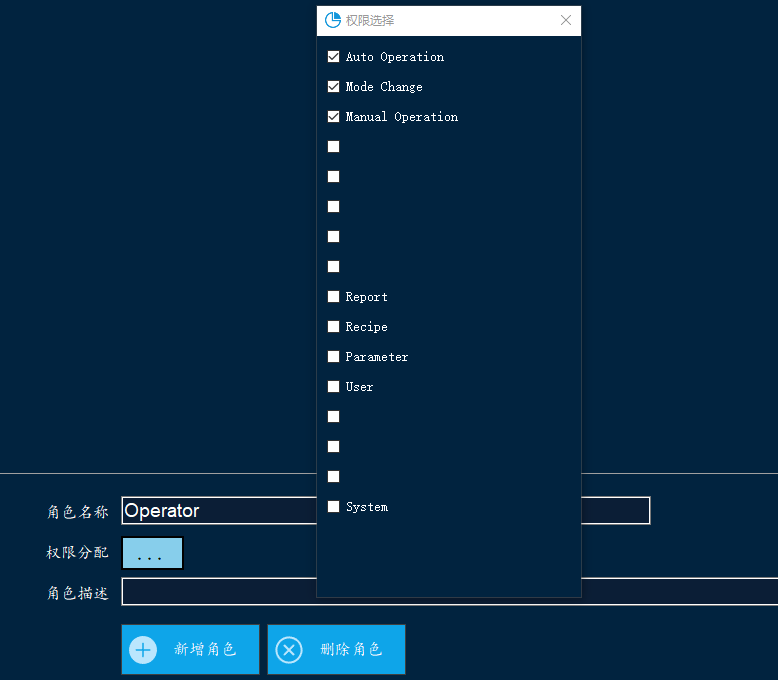
权限管理
基于角色的权限管理。可以为用户指定角色,为不同角色指定权限。
SuperSCADA是一款采用现代化编程思想的全能型上位机框架。它不仅仅是一个项目快速开发利器,大部分项目,基于它修修改改即可完成。并且是一个知识沉淀的工程化基座,通过依赖注入、仓储模式与领域分层架构,将业务共性逻辑与工程最佳实践固化为高复用度的模块化组件,实现个人或者团队技术经验的持续积累与标准化传承。
SuperSCADA上位机框架是之前上位机项目实例的升级替代产品。所有上位机项目实例的用户可以免费升级。