📄 论文解析:GA3T ------ 让无人机和无人车一起"看懂"野外地形的数据集
论文全名: GA3T: A Ground-Aerial Terrain Traversability Dataset for Heterogeneous Robot Teams in Unstructured Environments
发布时间: 2026年5月(arXiv:2605.06478v1)
机构: 德雷塞尔大学,费城
数据集链接: https://drexel0-my.sharepoint.com/personal/sc3568_drexel_edu/_layouts/15/onedrive.aspx?id=%2Fpersonal%2Fsc3568_drexel_edu%2FDocuments%2FDRAS2026 GA3T Dataset\&ga=1
一、问题背景:野外机器人"睁眼瞎"的困境
自动驾驶领域已经积累了海量数据集,但那是在划好线的公路上,规则清晰,地面平整。把机器人扔进森林、河岸、泥泞的野地,情况就完全不同了。
单靠一台地面机器人(UGV)在野外穿行,面临的感知难题是显而易见的:
- 视野受限:树木、灌木、地形起伏把周围的地面景象切割成碎片,机器人只能看到眼前一小块
- 遮挡严重:前方的一个泥坑可能完全被枝叶遮住,等发现时已经陷进去了
- 模态单一:RGB 相机在强光、暗影交替的树林里表现不稳定,单一传感器容易失效
那如果加上一架无人机(UAV)从空中俯瞰呢?理论上完美------但现实中,适合训练和验证这类空地协同感知算法的真实世界数据集,几乎不存在。
现有数据集的通病是:要么专注 SLAM、强调广度覆盖而不是重叠视角;要么在仿真环境生成,缺乏真实传感器的噪声和漂移;要么在相对开阔的场景收集,缺乏密集植被和复杂地形。更关键的是,几乎没有人在非结构化野外环境中同时收集异构空地机器人的多模态数据。
GA3T(Ground-Aerial Team for Terrain Traversal)就是为填补这个空白而生的。
二、应用场景:哪里需要"空地协同感知"?
这个数据集瞄准的不是某一个具体算法,而是一类真实需求:
| 场景 | 为什么需要空地协同 |
|---|---|
| 搜救行动 | 灾区植被密集、地形破碎,地面机器人难以掌握全局,UAV 提供航拍指引 |
| 农林巡检 | 地面机器人深入林间,UAV 从上方识别病虫害区域、水体位置 |
| 军事侦察 | 地面机器人需实时获取空中情报,热成像帮助在遮蔽条件下定位目标 |
| 野外科考 | 科学考察队部署机器人团队,感知地质、植被、土壤状态 |
| 无人化物流 | 复杂地形中的最后一英里,UAV 提前探路,UGV 选择最优可通行路径 |
| 自主越野导航 | 机器人需要实时判断哪些地形可通行,哪些是陷阱(深泥、积水、陡坡) |
这些场景都有一个共同点:单一视角不够用,必须融合空中和地面的互补感知。
三、数据集内容:一份"接地气"的野外记录
3.1 硬件平台
GA3T 的主角是两位搭档:

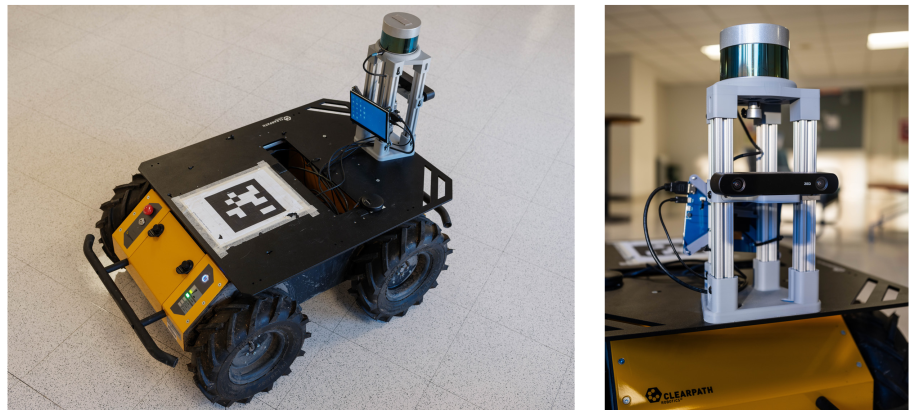
地面机器人 Clearpath Husky A200,身上挂满了传感器:
- Velodyne VLP-32C 32 线激光雷达(最远 200 米,全向扫描)
- ZED 2 双目相机(含内置 IMU)
- Garmin GPS 接收器
- NVIDIA Jetson Orin NX 板载计算机(运行 ROS 1)
- 索尼 PS5 手柄遥控(是的,就是那个游戏手柄)
空中搭档 Autel EVO II Dual 640T V3,一架带热成像的无人机:
- 高分辨率 RGB 相机(最高支持 8K 视频)
- FLIR 热红外相机(640×512,温度精度 ±3°C)
- GPS 遥测
- 续航约 38 分钟

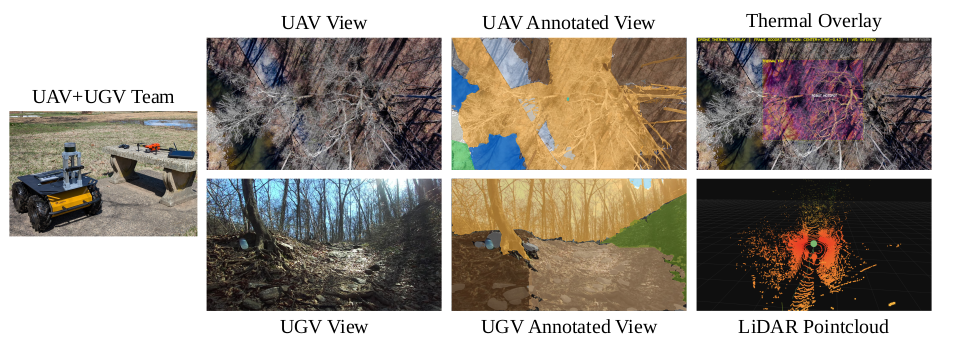
两者的组合非常互补------UGV 提供密集的几何感知,UAV 提供宽广的视角和热成像上下文。
3.2 采集环境:不是公园,是真正的野外
数据集在 4 个真实户外环境中采集,合计超过 13,000 帧同步数据,约 29 分钟:
- 森林小径:地面崎岖,岩石泥土交错,树冠密集,遮挡严重
- 森林宽路:相对平坦,但存在视觉欺骗性------看起来类似的区域可能是泥坑也可能是硬地
- 河岸乱石滩:大石头、砾石、泥土混合,地面起伏剧烈,树少,UGV 在空中视角下更清晰
- 泥泞草地(约 8000 帧,含手工精标注):有草地、泥坑、积雪、水坑......Husky 在这里差点翻车,是全数据集中最"刺激"的一段
值得一提的是,数据采集选在早春 ,树木尚未长叶,UAV 能透过稀疏枝杈部分看到地面和 UGV------这不是偶然,而是刻意设计的,专门用于研究遮挡感知下的协同视觉。
四、方法:数据是怎么处理成可用状态的?
原始数据收集回来只是"原材料",要让它成为有价值的基准,需要三道工序:
4.1 UGV 轨迹精化:LiDAR + GPS 双剑合璧
GPS 有精度,但漂移大;LiDAR 里程计精准连贯,但会长期累积误差。论文将二者融合:先用 KISS-ICP 算法从 LiDAR 点云估计局部相对位移,再用 GPS 坐标锚定全局方向,通过求解最小化残差的旋转角 θ,得到全局一致且局部精准的 UGV 轨迹。
这就像导航时既参考路标(GPS)又依靠里程表(LiDAR),两者互补纠错。
4.2 热成像与 RGB 对齐:没有外参标定怎么办?
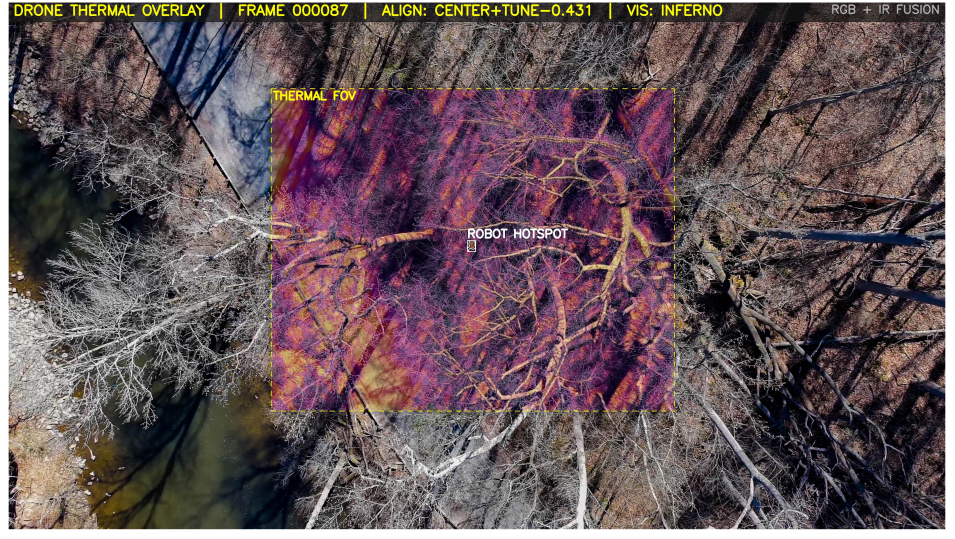
UAV 的 RGB 相机和热成像相机没有预先标定外参(毕竟是商用消费级无人机),所以两路图像需要后处理对齐。
论文采用梯度域匹配方法:先对两种图像进行 CLAHE 直方图均衡和 Sobel 梯度提取,让它们在结构边缘上"找到共同语言";再用归一化互相关(NCC)结合惩罚项,从粗到细搜索最优的几何变换 T,最终实现热成像叠加到 RGB 图像上。
对齐的好处立竿见影------在热成像图像里,UGV 机器人会发出明显的热信号(红色亮斑),即便 RGB 图中被树叶挡住,热像图也能定位到它的存在。这是一个非常实用的跨模态机器人定位线索。
4.3 语义标注:SAM3 打底,人工修正
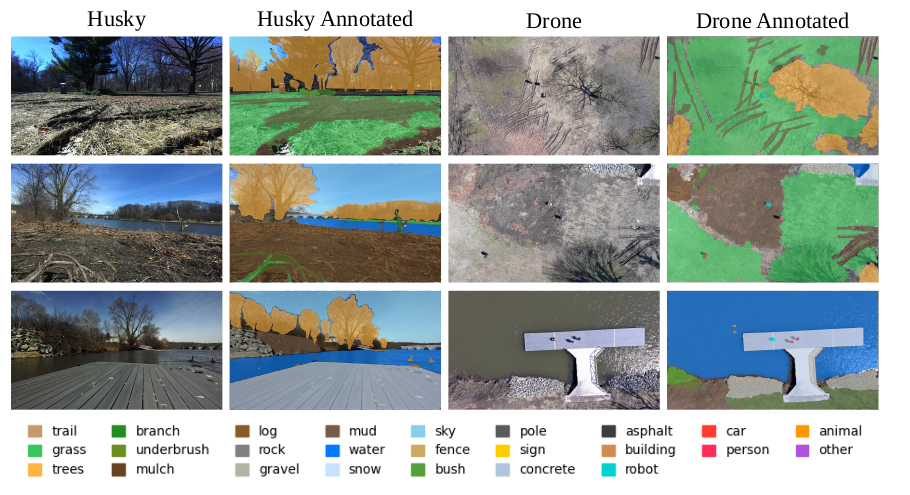
手工标注 8000 张图片从像素级开始画,不现实。论文采用基础模型辅助 + 人工修正的流水线:
- 用 SAM3(Segment Anything Model 3)生成初始分割 Mask 提案
- 人工标注员只需检查 Mask、分配语义类别、纠正错误------无需从头画
- 修正后的标签再用于微调 SAM3,提升下一批次的预标注质量(迭代自改进)
标注类别涵盖 20 余类:泥土、草地、岩石、水体、雪、树干、树枝、泥坑、金属码头、机器人本身......几乎是一份"野外地形百科"。
4.4 基准测试:微调 SAM3 在野外行吗?
论文用约 8000 张手工标注图像对 SAM3 进行两阶段微调(先冻结骨干网络只训解码头,再解冻骨干联合微调),结果如下:
| 模型策略 | UGV 视角 IoU | UAV 视角 IoU | 综合 IoU |
|---|---|---|---|
| 零样本基线 | 0.703 | 0.504 | 0.562 |
| 阶段一微调(仅头部) | 0.743 | 0.688 | 0.715 |
| 阶段二微调(全量) | 0.731 | 0.727 | 0.729 |
最显著的改进在 UAV 视角------从 0.504 跃升到 0.727,提升幅度接近 45%。这说明泛化预训练模型对俯视野外场景的理解确实薄弱,而 GA3T 提供的数据能有效弥补这一缺口。
五、创新点:这份数据集凭什么与众不同?
✦ 创新一:第一个同时满足四个条件的数据集
作者明确声称,据其所知,目前没有任何数据集同时满足:(i) 真实世界异构空地多机器人数据;(ii) 覆盖多样地形(泥、草、雪、砾石、水岸);(iii) 包含热红外模态;(iv) 早春采集、稀疏树冠自然产生的遮挡变化。这四者的交集,在现有数据集中是空白的。
✦ 创新二:热成像模态 ------ 一个被低估的"超级感官"
RGB 相机在树荫交错、强光逆光的野外环境中非常脆弱,而热成像对光照完全不感冒。特别是在寻找生物目标(人、动物)或判断水体、泥潭边界时,热成像能揭示 RGB 完全看不到的信息。数据集中将热成像与 RGB 对齐,为跨模态融合研究提供了罕见的真实数据。
✦ 创新三:遮挡感知的协同感知设计
早春无叶树冠是一个天然的"遮挡实验室":UAV 能透过枝杈部分看到地面,但不完整;UGV 在地面看不到树冠后方的状况。这种刻意选择的采集时机,让数据集天然包含了不同遮挡程度下的空地互补感知样本,支持研究"当一方看不见时,另一方能补充什么"。
✦ 创新四:遥控操作日志 ------ 为学习型导航策略埋下伏笔
所有 UGV 的 PS5 手柄控制指令都与传感器数据同步记录。这意味着数据集不只能用于感知任务,还能支持模仿学习 和视觉运动策略学习:让机器人从人类驾驶员的操作示范中学习如何在野外安全行驶。
六、不足之处:诚实地看待局限
⚠ 不足一:数据规模偏小,总量仅 29 分钟
13,000 帧、29 分钟的数据,与 RUGD、RELLIS-3D 等主流野外感知数据集相比体量有限。尤其对于需要大量样本的深度学习训练,这个规模可能制约了所能开展的实验类型。
⚠ 不足二:空地同步精度有上限
两平台没有硬件触发器,时间同步依赖 GPS 时间戳,最大偏差可达 200ms。对于高速移动场景,200ms 足以带来显著的位置偏差。现有的插值补偿方案是软件层面的权宜之计,无法完全消除同步误差的影响。
⚠ 不足三:空间对齐仅达粗粒度
UAV 和 UGV 之间的空间对齐依赖 GPS,精度约 3 米级。这对于大场景的宏观关联尚可接受,但对于像素级的跨视角精确融合(比如将 UAV 的某个像素和 UGV 的某个像素精确对应),这样的精度远远不够。
⚠ 不足四:基准任务较为单一
目前提供的基准仅是语义分割一个任务,且直接用 SAM3 微调验证。数据集声称能支持的丰富任务------协同可通行性估计、跨视角路径规划、空地联合 SLAM------均无基准实现,社区需要自行搭建评估框架,增加了使用门槛。
⚠ 不足五:缺乏精确的外参标定数据
UAV 的 RGB 和热成像相机没有预标定,空地之间也没有精确的外参变换关系。热成像对齐采用的是图像层面的近似方法,在边缘对齐精度上存在误差。这对于需要精确几何投影的跨模态融合算法来说是一个硬伤。
七、与前两篇论文的定位对比
看到这里,结合同期的 CoPCS 和学习加速轨迹规划论文,可以看出这三篇论文实际上在异构空地机器人这个大方向上各占一个层次:
| 层次 | 论文 | 解决什么 |
|---|---|---|
| 感知层 | GA3T(本文) | 提供真实世界的多模态感知数据,让机器人"看得见" |
| 规划层 | CoPCS | 在感知基础上协同规划任务路径,让机器人"知道去哪" |
| 执行层 | 学习加速轨迹规划 | 快速生成精确轨迹,让机器人"安全到达" |
GA3T 填补的是最底层的基础------没有高质量的真实感知数据,上层的规划和控制算法就是在沙滩上建房子。
八、总结:一份"恰到好处的混乱"的礼物
GA3T 的可贵之处不在于它的数据有多干净,恰恰相反------它保留了野外环境天然的混乱:会翻车的泥沟、透光不稳的树冠、光线变幻的早春林间。
这正是现有数据集所缺乏的 "真实的粗糙感"。
它可能不是目前最大的数据集,也不是标注最完善的基准,但它是最接近真实野外部署场景的空地协同感知数据集之一。对于立志把机器人送进森林、送上山地、送入灾区的研究者来说,GA3T 是一份值得认真对待的礼物。