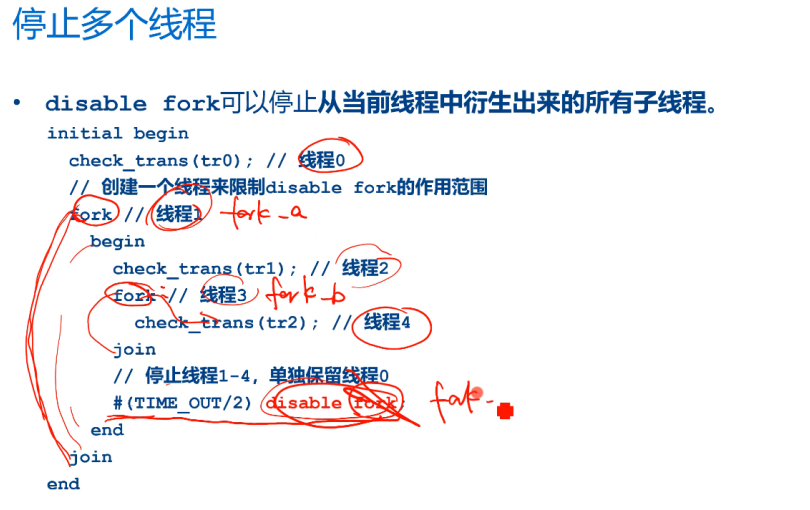
根据上面的代码片段,并不会真的产生注释中所说的"线程0~4"这5个独立的线程 。注释中的编号是对线程概念的简化示意,但实际的行为与注释有较大差异。下面我会详细解释这段代码真实的线程创建与执行原理。
一、代码正确解读(去除注释的误导)
initial begin
check_trans(tr0); // 步骤A
fork // 步骤B:创建子线程
begin
check_trans(tr1); // 步骤C
fork // 步骤D:再创建一个子线程
check_trans(tr2); // 步骤E
join // 等待步骤E的子线程结束
#(TIME_OUT/2) disable fork; // 步骤F
end
join // 等待步骤B的子线程结束
end二、真实产生的线程分析
1. 主线程(可以称为 thread_main)
-
initial块启动时,SV仿真器为主线程(即initial进程)分配一个执行线程。 -
步骤A :
check_trans(tr0)在主线程中顺序执行,不会创建新线程。 -
步骤B :遇到
fork...join,主线程派生一个子线程 (称为thread_A)来执行begin...end块,然后主线程阻塞 在join处,等待thread_A结束。
✅ 此时存在的线程:
thread_main(阻塞中)、thread_A(运行中)。
2. 子线程 thread_A
-
步骤C :
check_trans(tr1)在thread_A中顺序执行,不创建新线程。 -
步骤D :遇到内部的
fork...join,thread_A派生一个孙线程 (称为thread_B)来执行check_trans(tr2),然后thread_A阻塞 在内部的join处,等待thread_B结束。
✅ 此时存在的线程:
thread_main(阻塞)、thread_A(阻塞)、thread_B(运行中)。
-
步骤E :
thread_B执行check_trans(tr2)并结束。内部的join完成,thread_A恢复执行。 -
步骤F :
thread_A执行#(TIME_OUT/2) disable fork;。
disable fork 的作用
-
它会终止当前线程(即
thread_A)的所有活跃子线程。 -
由于
thread_B已经结束,此时没有活跃的子线程,所以这条语句没有任何效果。 -
重要 :
disable fork不会 终止thread_A自身,也不会影响它的父线程thread_main。 -
thread_A执行完disable fork后,begin...end块结束,thread_A退出。 -
外层的
join感知到thread_A结束,主线程thread_main恢复执行,然后initial块结束。
三、为什么注释中说"线程0~4"?
注释中的编号是一种不严谨的标记:
-
线程0:主线程(实际存在)。
-
线程1 :外层
fork创建的子线程thread_A(实际存在)。 -
线程2 :
check_trans(tr1)被误认为独立线程 ------ 它只是thread_A内的一个函数调用。 -
线程3 :内层
fork本身被误认为线程 ------fork语句不创建自身线程,它是派生动作。 -
线程4 :
check_trans(tr2)被误认为独立线程 ------ 它实际是thread_B内的函数调用。
所以,真实存在的独立线程最多只有3个 :主线程、外层 fork 的子线程、内层 fork 的孙线程。而且由于内层 fork...join 会等待孙线程结束,这三个线程的执行是近乎顺序的(主线程等待子线程,子线程等待孙线程),不会有三个线程同时并行执行的情况。
四、结论
-
不会产生5个独立线程,注释中的编号是错误的。
-
原理 :
fork...join创建新线程;函数调用不创建线程;disable fork只终止当前线程的子线程,不影响自身及父线程。 -
如果想要"停止多个线程",需要注意
disable fork的作用范围,并且通常需要配合fork...join_none或适当的线程组织才能实现真正的并发控制。
下面给出一个能够实现"停止线程1~4,单独保留线程0"的正确 SystemVerilog 代码示例,并详细解释其原理。
✅ 正确的示例代码
module top;
// 模拟一个耗时检查任务
task check_trans(int id);
$display("[%0t] Thread %0d started", $time, id);
#100;
$display("[%0t] Thread %0d finished", $time, id);
endtask
initial begin
// 线程0(主线程)
$display("[%0t] Main thread (thread 0) started", $time);
// 创建4个并发子线程(线程1~4)
fork
check_trans(1); // 线程1
check_trans(2); // 线程2
check_trans(3); // 线程3
check_trans(4); // 线程4
join_none // 主线程不等待子线程,继续执行
// 主线程继续执行其他任务(比如监控)
#50; // 让子线程运行50时间单位
// 停止所有从当前线程(主线程)派生的子线程
$display("[%0t] Disabling all forked threads...", $time);
disable fork; // 杀死线程1~4
// 验证子线程已被停止
#200;
$display("[%0t] Main thread finished", $time);
end
endmodule可能的输出结果(时间单位视仿真器而定):
[0] Main thread (thread 0) started
[0] Thread 1 started
[0] Thread 2 started
[0] Thread 3 started
[0] Thread 4 started
[50] Disabling all forked threads...
[250] Main thread finished可以看到,子线程在 #50 时被终止,没有输出 "finished" 信息。
🔍 原理详解
1. 线程编号对照
| 代码实体 | 注释中的线程编号 | 实际线程类型 |
|---|---|---|
initial 块整体 |
线程0 | 主线程(父线程) |
fork...join_none 内的四个 check_trans 调用 |
线程1~4 | 主线程的子线程 |
2. fork...join_none 的作用
-
它会立即 派生所有子线程(每个
check_trans(id)成为一个独立并发线程)。 -
主线程不等待 子线程结束,直接继续执行后续代码(
#50和disable fork)。 -
如果没有
join_none,而是使用join或join_any,主线程就会被阻塞,无法在子线程运行中途执行disable fork。
3. disable fork 的作用
-
该语句终止调用它的线程的所有活跃子线程。
-
此处主线程调用
disable fork,因此主线程的所有子线程(线程1~4)都会被立即终止。 -
主线程自身不会被终止 ,
disable fork只影响后代,不影响自身。 -
已经被终止的线程不会执行剩余的代码(如
#100; $display(...finished))。
4. 为什么能"单独保留线程0"?
因为 disable fork 只杀死了从主线程派生出来的子线程,主线程本身继续运行,并执行了最后的 #200 和 $display。
🔧 扩展:更精细的控制(只停止部分子线程)
如果需求是"只停止某几个子线程,保留其他子线程继续运行",可以使用 process 类 (SystemVerilog 2012+)或 fork...join 配合命名块。
示例:使用 process 类停止特定线程
systemverilog
process p1, p2, p3, p4;
initial begin
fork
begin : t1 p1 = process::self(); check_trans(1); end
begin : t2 p2 = process::self(); check_trans(2); end
begin : t3 p3 = process::self(); check_trans(3); end
begin : t4 p4 = process::self(); check_trans(4); end
join_none
#50;
p1.kill(); // 只停止线程1
p2.kill(); // 只停止线程2
// p3, p4 继续运行
end📌 关键注意事项
-
disable fork作用范围 :它会杀死当前线程的所有子线程 ,包括嵌套派生出来的孙线程。在上述例子中,因为子线程内部没有再次fork,所以影响范围正好是线程1~4。 -
不要在主线程的多个位置随意使用
disable fork:如果你在主线程中再次fork了新任务,后面再调用disable fork也会杀死它们。通常建议将需要受控的子线程集中在一个fork...join_none块中。 -
时序控制 :需要确保
disable fork在子线程执行完之前发生,否则子线程可能已经自然结束,此时disable fork没有效果(但也不会出错)。
💎 总结
-
原始图片代码 的问题:使用
fork...join导致顺序执行,disable fork作用范围错误,无法实现"停止多个线程"。 -
正确做法 :使用
fork...join_none创建并发子线程,然后在需要的时间点由主线程执行disable fork来终止它们。 -
原理核心 :
fork...join_none+disable fork是 SystemVerilog 中实现"超时控制"或"抢先停止子任务"的经典模式。