编写C++项目
1、创建包
cd到src目录
bash
cd src创建C++包
bash
ros2 pkg create \
--build-type ament_cmake \
--dependencies moveit_ros_planning_interface rclcpp \
--node-name hello_moveit hello_moveit请注意,我们已将
<package_name>``moveit_ros_planning_interface和<package_name>添加为依赖项。这将对<package_name>和<package_name>文件rclcpp进行必要的更改,以便我们可以依赖这两个软件包。package.xml``CMakeLists.txt
2、创建 ROS 节点和执行器
c++
#include <memory>
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.hpp>
int main(int argc, char *argv[])
{
// 初始化ROS并创建节点
rclcpp::init(argc, argv);
auto const node = std::make_shared<rclcpp::Node>(
"hello_moveit",
rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));
// 创建 ROS logger
auto const logger = rclcpp::get_logger("hello_moveit");
// 下一步,创建 MoveIt! 的 MoveGroupInterface 对象
// 关闭 ROS
rclcpp::shutdown();
return 0;
}将目录切换回工作区目录ws_moveit即cd ..,然后运行以下命令:
bash
colcon build --mixin debug成功后,打开一个新的终端,然后在该新终端中执行工作区环境脚本
bash
cd ~/ws_moveit
source install/setup.bash运行程序并查看输出结果
bash
ros2 run hello_moveit hello_moveit使用 MoveGroupInterface 进行计划和执行
将"下一步,创建 MoveIt! 的 MoveGroupInterface 对象"的注释替换为以下代码
c++
using moveit::planning_interface::MoveGroupInterface;
auto move_group_interface = MoveGroupInterface(node, "manipulator");
// 设置一个目标位姿
// 起始姿态隐式地等于关节状态发布器发布的位置,
auto const target_pose = []
{
geometry_msgs::msg::Pose msg;
msg.orientation.w = 1.0;
msg.position.x = 0.28;
msg.position.y = -0.2;
msg.position.z = 0.5;
return msg;
}();
move_group_interface.setPoseTarget(target_pose);
// 创建一个目标点规划
auto const [success, plan] = [&move_group_interface]
{
moveit::planning_interface::MoveGroupInterface::Plan msg;
auto const ok = static_cast<bool>(move_group_interface.plan(msg));
return std::make_pair(ok, msg);
}();
// 执行规划
if (success)
{
move_group_interface.execute(plan);
}
else
{
RCLCPP_ERROR(logger, "Planning failed!");
}- 启始姿态可以通过
MoveGroupInterface::setStartState*设置
在工作区目录中ws_moveit,运行以下命令:
bash
colcon build --mixin debug在另一个终端中,加载工作区,然后执行以下命令:
bash
ros2 launch moveit2_tutorials demo.launch.py在第三个终端中,加载工作区并运行你的程序
bash
source install/setup.bash
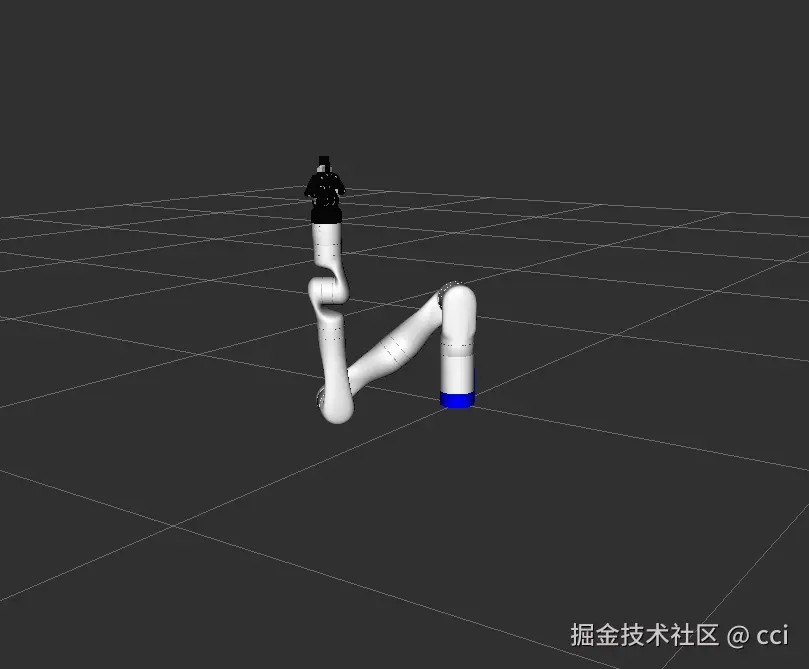
ros2 run hello_moveit hello_moveitRViz 中的机器人会移动并最终摆出以下姿势:
如果在 10 秒内找不到
robot_description就会报错退出