前置说明:本章是整个ROS2机器人仿真课程的奠基篇。在正式学习ROS2工具和编程方法之前,我们有必要先了解机器人技术的来龙去脉------它从哪里来?现在在哪里?将要到哪里去?只有理解了这些背景知识,你才能更好地理解为什么ROS2要这样设计,以及为什么掌握机器人仿真技能在当今时代如此重要。
1. 机器人起源
1.1 从神话到机械------人类对"人造生命"的千年追求
人类创造机器人的梦想,可以追溯到几千年前的神话传说。
在希腊神话中,赫菲斯托斯(Hephaestus)------希腊神话中的火神与工匠之神------据说他用黄金打造了能够帮助他锻造金属的机械女仆。这是人类最早关于"人造劳动者"的想象。中国古代同样有类似的传说,东汉科学家张衡发明的"木牛流马"被认为是最早的"自动机械"之一,虽然其真实原理至今仍有争议,但反映出古人对于能够自动运输货物的机械装置的渴望。
进入中世纪,欧洲的能工巧匠们开始将神话变为现实。1738年,法国发明家雅克·德·沃康松(Jacques de Vaucanson)制作了一只能够活动翅膀、吃东西、排泄的"机械鸭",这只机械鸭虽然只是精巧的玩具,但它展示了机械传动原理在模仿生物运动方面的可能性。随后,瑞士的制表大师们更是制作出能够写字、绘画、弹奏乐器的"自动人偶",这些装置被收藏在欧洲各大宫廷中,成为当时科技与艺术完美结合的象征。
1.2 "Robot"一词的诞生
1920年,一个注定被载入史册的新词汇诞生了。
捷克作家卡雷尔·恰佩克(Karel Čapek)在他的科幻剧作《罗梭的万能工人》(Rossum's Universal Robots,简称R.U.R.)中,首次创造了"Robot"这个词。在捷克语中,"robota"意为"强制劳动"或"苦工",恰佩克用它来描述一种能够不知疲倦地为人类工作的"人造工人"。这部戏剧讲述了一个人造机器人反叛并消灭人类的故事,是最早对人工智能可能带来的风险进行深刻思考的文艺作品之一。

图注:1920年首演的《罗梭的万能工人》海报,卡雷尔·恰佩克创造了"Robot"一词
从那时起,"Robot"这个词汇迅速传播到全世界,成为所有类型机器的统称。而"robotics"(机器人学)这个学科名称,则是由科幻大师艾萨克·阿西莫夫(Isaac Asimov)在1942年首次提出。
2. 发展阶段
2.1 三次浪潮------机器人技术如何走到今天
回顾机器人技术的发展历程,可以清晰地看到三个重要阶段,每一次技术突破都伴随着产业的爆发式增长。
第一代:示教再现型机器人(1960s-1970s)
1961年,一个载入工业史册的年份。美国通用汽车公司在其新泽西工厂中,安装了世界上第一台工业机器人------尤尼梅特(Unimate)。这台由工程师约瑟夫·恩格尔伯格(Joseph Engelberger)发明的庞然大物,重达两吨,靠液压驱动,能够精确地完成焊接操作。在此之前,汽车焊接完全依赖工人手持焊枪,不仅效率低下,还会对工人的健康造成严重损害。尤尼梅特的诞生,标志着机器人正式进入工业生产领域。

图注:1961年安装在通用汽车工厂的世界上第一台工业机器人尤尼梅特
这一代机器人的核心特征是"示教再现"------工人需要先手动操作机器人完成一遍任务,机器人会记住整个动作轨迹,然后可以无限次地重复执行。这种方式虽然开启了工业自动化的序幕,但缺点也很明显:无法应对复杂多变的环境,一旦产品型号变化,就需要重新示教。

图注:现代工业机器人广泛应用于汽车制造、电子装配等领域
第二代:感知型机器人(1980s-1990s)
1980年代,随着传感器技术的进步,机器人开始拥有"感知"世界的能力。这一代机器人配备了力觉传感器、触觉传感器甚至视觉传感器,能够根据环境变化调整自己的行为。
日本在这个时期成为全球最大的工业机器人生产国。发那科(Fanuc)、安川(Yaskawa)、松下(松下)等日本企业迅速崛起,成为工业机器人领域的巨头。1980年,也因此被业界称为"机器人元年"。
第三代:智能机器人(2000s-至今)
进入21世纪,人工智能技术的突破让机器人真正变得"智能"起来。2000年,日本本田公司展示了能够像人类一样行走、跑步、上下楼梯的阿西莫(ASIMO)机器人,这是世界上最早具备双足运动能力的人形机器人之一。2013年,波士顿动力公司(Boston Dynamics)的Atlas双足机器人首次公开亮相,它能够完成跳跃、翻滚、后空翻等高难度动作,刷新了人们对机器人运动能力的认知。

图注:波士顿动力Atlas是智能机器人的代表,能够完成复杂动作
2.2 中国人形机器人崛起
近年来,中国在人形机器人领域取得了显著进展,涌现出一批具有国际竞争力的企业和技术成果。
宇树科技(Unitree) 是中国领先的足式机器人公司,其发布的Unitree H1是目前国内最先进的人形机器人之一。H1身高约1.8米,体重47kg,最高奔跑速度可达3.3m/s,刷新了同类产品的纪录。宇树科技采用自主研发的电机驱动系统,实现了高性能运动控制。

图注:宇树科技Unitree H1人形机器人
智元机器人(AGIBOT) 成立于2023年,由华为前高管创立,专注于通用人形机器人的研发。智元机器人致力于打造具有高度智能化的人形机器人平台,应用于工业制造、商业服务和家庭场景。
图注:智元机器人通用人形机器人
逐际动力(LimX Dynamics) 是中国领先的足式机器人公司,在双足和多足机器人领域拥有深厚的技术积累。逐际动力发布的P系列双足机器人具备稳定的行走和奔跑能力,在复杂地形适应方面表现突出。

图注:逐际动力双足机器人
国产机器人与Atlas的对比:
| 维度 | 波士顿动力Atlas | 中国人形机器人 |
|---|---|---|
| 驱动方式 | 液压驱动 | 电机驱动 |
| 运动能力 | 跑酷、后空翻 | 行走、奔跑 |
| 成本 | 百万级 | 十万级 |
| 应用场景 | 研究为主 | 商业化探索 |
| 产业链 | 美国 | 中国制造 |
总体来看,中国人形机器人在商业化落地 和成本控制方面具有优势。
3. 行业应用背景
3.1 机器人已经改变了哪些行业?
机器人技术的价值,最终体现在它能够解决实际问题、创造经济价值。今天,机器人已经渗透到几乎所有行业的各个角落。
工业制造------汽车行业的革命性变革
要说机器人应用最成熟的领域,工业制造当之无愧。汽车制造是工业机器人最大的应用市场。一辆普通汽车的制造过程中,需要用到上百台不同类型的工业机器人,包括焊接机器人、喷涂机器人、装配机器人、搬运机器人等。
以焊接为例,传统手工焊接需要工人长时间保持同一姿势,不仅劳动强度大,而且焊接质量难以保证。现代汽车工厂中,焊接工作几乎全部由机器人完成,焊缝均匀美观,生产效率是人工的数倍。
物流仓储------电商时代的幕后英雄
当你网上购物时,可能从未想过那些包裹是如何快速准确地被分拣、装车的。在亚马逊的仓库中,数以万计的Kiva机器人(现为Amazon Robotics)在地上忙碌地穿梭,它们驮着货架在仓库中移动,把需要的商品送到分拣员面前。这种"货到人"的模式,让仓库分拣效率提升了5倍以上。

图注:亚马逊仓库中的Kiva机器人大幅提升物流效率
医疗健康------生命的守护者
在手术室里,达芬奇手术机器人(Da Vinci Surgical System)已经成为外科医生的得力助手。它不是真的"自主"做手术,而是通过医生远程操控,辅助完成精细的微创手术。医生坐在操作台前,像玩游戏手柄一样控制机械臂,机械臂能够消除人手部颤动的影响,让手术更加精准。
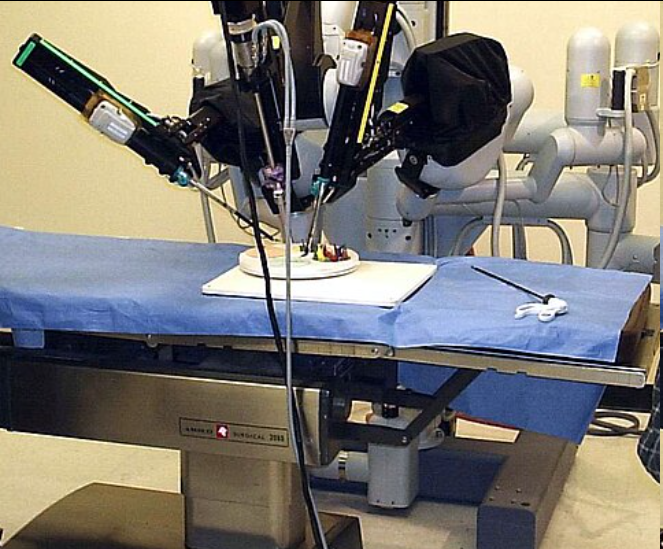
图注:达芬奇手术机器人辅助医生完成微创手术
4. 机器人技术发展趋势
4.1 未来已来------这些趋势正在重塑机器人产业
站在今天的时间节点上,我们能够清晰地看到机器人技术正在朝着几个重要方向演进。
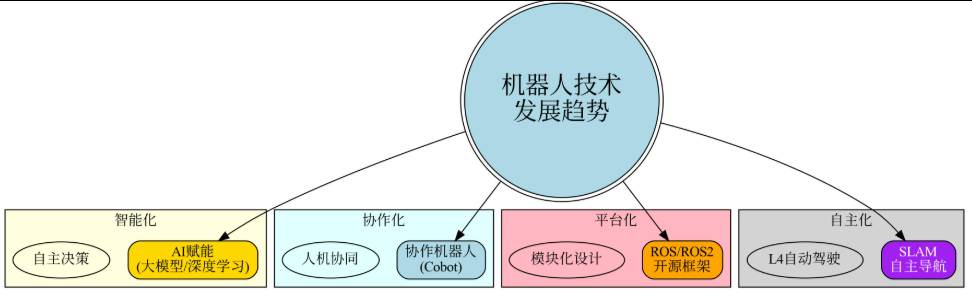
图注:机器人技术四大发展趋势:智能化、协作化、平台化、自主化
趋势一:智能化------从"自动化"到"自主化"
传统机器人需要人类预先设定所有动作,而新一代智能机器人能够自己"思考"。随着深度学习、强化学习等人工智能技术的发展,机器人开始具备自主学习、推理决策的能力。
趋势二:协作化------人与机器共舞
传统工业机器人需要安装在安全围栏里,因为它们力量太大、速度太快,靠近会很危险。但新一代协作机器人(Collaborative Robot,简称Cobot)能够与人类安全地近距离协同工作。
趋势三:平台化------降低开发门槛
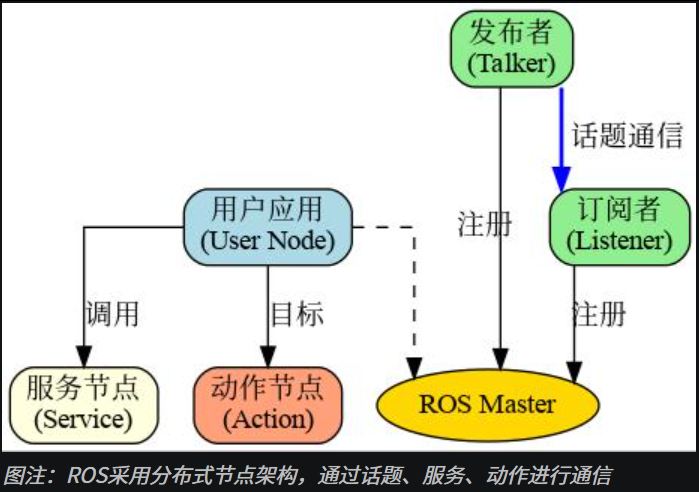
开源机器人操作系统ROS(Robot Operating System)的出现,是机器人软件领域的一次革命。它提供了一套标准化的通信框架和工具库,让开发者可以专注于核心算法,而不是底层硬件驱动。
5. 具身智能
5.1 为什么"具身智能"是AI的下一个前沿?
如果你关注人工智能领域的最新动态,一定听说过"具身智能"(Embodied AI)这个词。为什么它如此重要?
什么是具身智能?
传统的人工智能------比如你手机里的语音助手、ChatGPT------它们主要处理的是符号数据:文字、图像、声音。这些AI没有"身体",无法与物理世界直接交互。
而具身智能则强调AI需要"具身"------拥有一个物理载体(机器人、无人机、智能设备等),通过传感器感知世界,通过执行器改变世界,在与环境的交互中学习和进化。
为什么具身智能重要?
著名AI研究者李飞飞教授曾提出一个观点:"AI的下一个重大进步将是'赋予AI身体'。"
这是因为,我们人类的所有智能------语言、推理、学习------都与我们的身体体验密切相关。我们知道"热"是什么,因为被烫过;我们知道"重"是什么,因为搬过重物。纯粹的语言模型可以写出关于"疼痛"的优美句子,但它从未真正"痛"过。
具身智能要让AI真正理解物理世界,就必须让它们有body(身体),有experience(体验)。
5.2 大语言模型在机器人中的应用
大语言模型(Large Language Model,简称LLM)的出现,为机器人理解自然语言指令带来了革命性突破。传统机器人控制系统需要将人类指令精确转换为低层动作指令,这一过程往往需要专业工程师进行繁琐的编程设计。而大语言模型能够理解模糊、复杂的自然语言描述,并将其转化为可执行的动作序列,极大地降低了人机交互的门槛。
谷歌于2023年发布的PaLM-E模型是这一领域的里程碑式工作。该模型将PaLM大语言模型与机器人视觉感知系统相融合,能够直接理解"把抽屉里的芯片拿出来放到盒子里"这样的复杂指令,并自主规划完整的动作序列来完成指令(Dadkhahi et al., 2023)。PaLM-E展示了LLM在机器人任务规划中的巨大潜力。
SayCan(Ahn et al., 2022)则采用了一种更实用的方法,将LLM作为"大脑"与可学习的技能库相结合。LLM负责理解任务并选择合适的技能,而每个技能则由强化学习训练的子策略执行。这种模块化架构既保留了语言理解的灵活性,又保证了动作执行的可靠性。
Code as Policies(Liang et al., 2023)更进一步,提出用代码作为机器人的通用表示形式。LLM可以直接生成Python代码来控制机器人,这些代码能够调用感知API、执行器控制函数,甚至包含反馈循环来实现复杂行为。
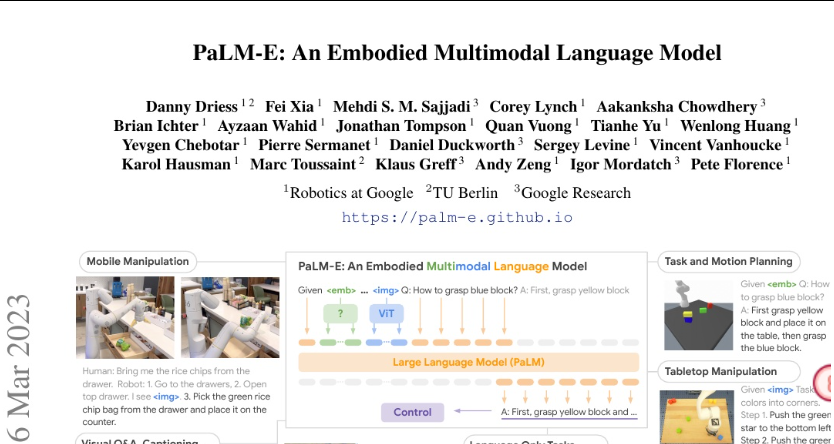
图注:PaLM-E模型理解自然语言指令并控制机器人执行任务
5.3 视觉语言模型在机器人中的应用
如果说大语言模型赋予了机器人"语言理解"的能力,那么视觉语言模型(Vision-Language Model,简称VLM)则让机器人拥有了"眼睛"。VLM能够同时理解图像和文本信息,实现跨模态的推理和理解,这在机器人感知环境中发挥着至关重要的作用。
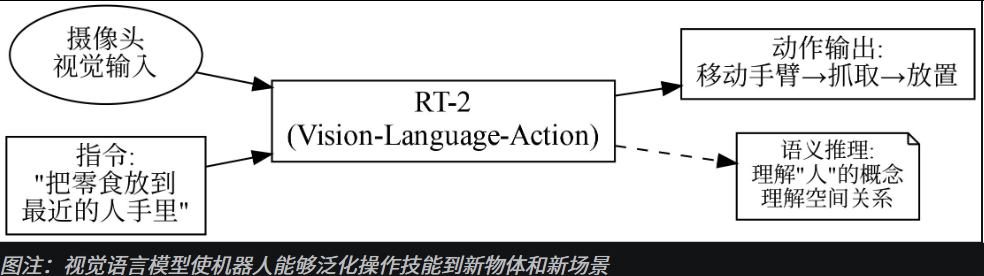
RT-2(Robotics Transformer 2)是DeepMind在2023年发布的重要工作,它是第一个能够直接从互联网规模的视觉-语言数据中学习泛化能力的机器人操作模型(Brohan et al., 2023)。RT-2将视觉输入和语言指令同时编码,通过Transformer架构直接输出机器人动作。
OK-Robot(Liu et al., 2024)专注于开放词汇物体抓取任务。该工作提出了一个简洁而有效的框架,能够在从未见过的环境中抓取任意物体。
Manipulate Anything (Song et al., 2024)则探索了在没有人类演示的情况下,如何让机器人通过视觉语言模型泛化操作技能。
5.4 视觉语言动作模型
视觉语言动作模型(Vision-Language-Action Model,简称VLA)是具身智能领域最前沿的研究方向之一。与VLM不同,VLA直接建立从视觉观察到动作输出的映射,实现端到端的学习和推理。
在RT-1的基础上,RT-2进一步引入了互联网规模的视觉语言预训练,使得模型具备了推理和泛化的能力(Brohan et al., 2023)。RT-2能够执行"把零食放到最近的人手里"这样的语义推理任务,展现了VLA在理解抽象概念方面的潜力。
VLA的核心优势在于其"端到端"特性:从感知到决策再到执行,整个过程在一个统一的神经网络中完成。这不仅简化了系统架构,更重要的是实现了全局优化。
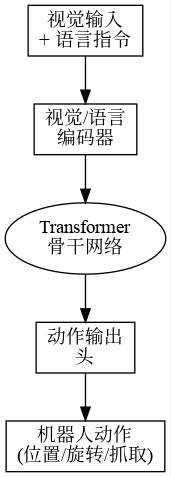
图注:RT-2是典型的VLA模型,直接输出机器人动作
5.5 强化学习在机器人控制中的应用
强化学习(Reinforcement Learning,简称RL)是让机器人通过与环境交互、自我试错来学习最优策略的方法。与传统的基于规则的编程不同,强化学习能够让机器人在未知环境中自主发现有效的行为模式。
2013年,DeepMind展示了Deep Q-Network(DQN)能够学习玩Atari游戏(Mnih et al., 2013),这一突破证明了深度强化学习在处理高维感知输入方面的潜力。
在连续控制领域,深度确定性策略梯度(DDPG)(Lillicrap et al., 2016)及其后续改进算法(如TD3、SAC)成为机器人运动控制的主流方法。
强化学习的核心挑战在于样本效率 ------机器人需要在真实环境中进行大量试错才能学到有效策略。为了解决这一问题,研究者们发展出了模拟到真实(Sim-to-Real)迁移 技术。

5.6 模仿学习在机器人技能习得中的应用
模仿学习(Imitation Learning)是让机器人从人类演示中学习技能的方法。与强化学习相比,模仿学习更加直观------人类直接展示如何完成任务,机器人通过观察学习执行相同的行为。
**行为克隆(Behavior Clone,BC)**是最基础的模仿学习方法。机器人直接监督学习的方式,从演示数据中学习从状态到动作的映射。
为了解决分布偏移问题,DAgger(Ross et al., 2011)提出了迭代式的训练方法。该方法让机器人在执行过程中不断收集人类纠正数据,然后用这些数据重新训练策略。
斯坦福大学的ALOHA (Zhao et al., 2024)框架则将模仿学习推向了新的高度。ALOHA使用低成本的可穿戴设备记录人类操作的高精度演示数据,然后通过行为克隆训练机器人执行相同任务。
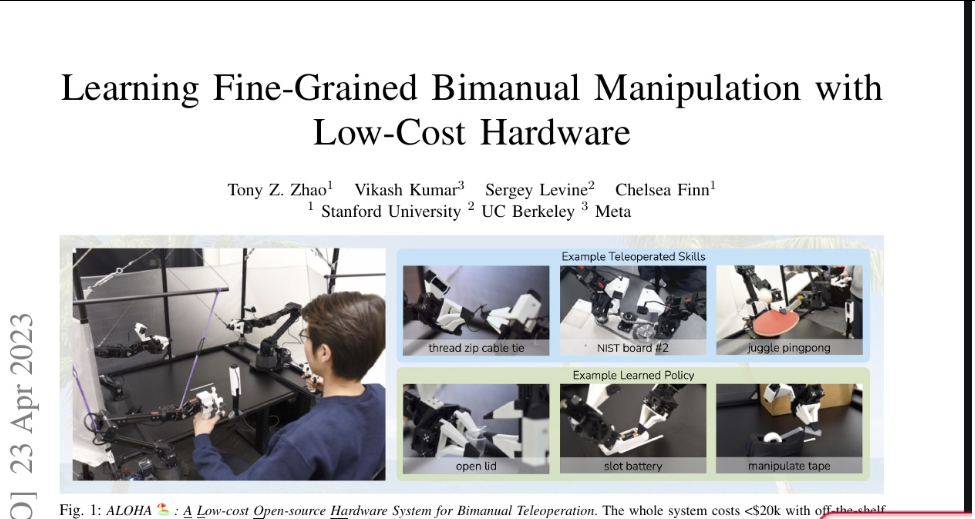
图注:ALOHA通过人类演示数据训练机器人掌握精细操作技能
5.7 空间智能与3D理解
空间智能是指机器人理解3D空间关系的能力。这是实现通用具身智能的关键技术之一。
PointNet(Qi et al., 2017)是3D深度学习的里程碑工作,它能够直接处理点云数据,实现3D物体的分类和分割。
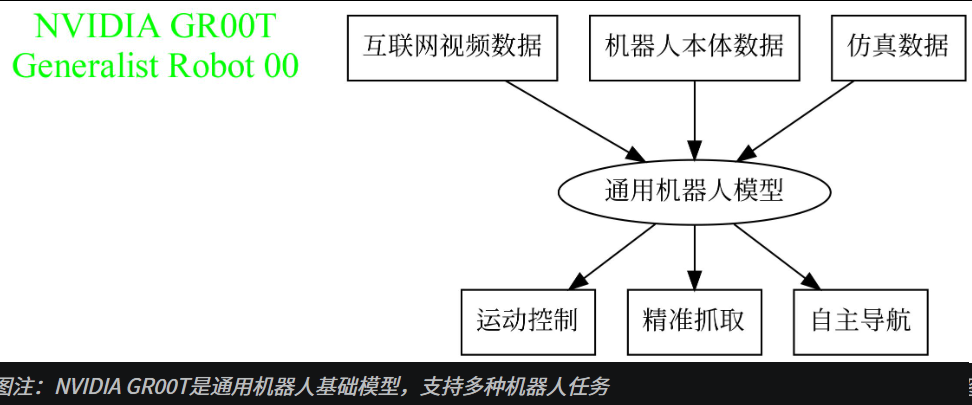
NVIDIA GR00T 是2024年发布的通用机器人基础模型,旨在让机器人具备理解3D空间、执行复杂任务的能力。
李飞飞与杨立昆的空间智能观点
李飞飞(Fei-Fei Li) 是斯坦福大学教授、斯坦福AI Lab主任,她近年来大力推动"空间智能(Spatial Intelligence)"概念。2024年,李飞飞在多个场合强调:真正的智能不仅仅是语言理解,更重要的是理解3D空间。她领导的团队正在研究如何让AI系统像人类一样理解空间关系、进行物理推理。李飞飞认为,"看"是智能的基础,视觉理解是通往通用智能的关键路径。她的研究涵盖3D场景理解、神经渲染、具身智能等领域。
杨立昆(Yann LeCun) 是图灵奖得主、Meta前AI首席科学家。2025年,杨立昆创立了新公司Advanced Machine Intelligence (AMI),筹集了超过10亿美元用于开发"世界模型"(World Models)。与当前的大语言模型不同,杨立昆认为真正的AI需要理解物理世界,需要具备常识和推理能力。他提出的JEPA(联合嵌入预测架构)是实现这一目标的关键路径。杨立昆多次公开表示:"现有的LLM无法实现通用人工智能,我们需要能够理解和预测物理世界的AI系统。"
两者的共识 :尽管方法不同,李飞飞和杨立昆都认为空间理解是通往更高级智能的关键。李飞飞从视觉角度出发,杨立昆从世界模型角度出发,两者共同推动具身智能的发展。
本章小结
本章我们一起回顾了机器人技术的发展历程。从古代的自动机械,到科幻作品中虚构的"人造工人",再到今天能够自主行走、与人协作的智能机器人,人类对机器人的想象与追求从未停止。
核心要点回顾:
- 机器人起源:从古代自动机到"Robot"一词的诞生
- 发展阶段:经历了示教再现→感知型→智能机器人三次重要演进
- 行业应用:工业制造、物流仓储、医疗健康、服务行业等领域广泛应用
- 发展趋势:智能化、协作化、平台化是三大核心方向
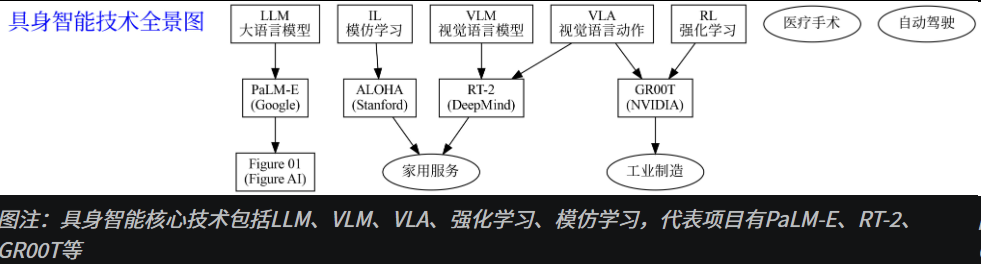
- 具身智能:LLM、VLM、VLA、强化学习、模仿学习、空间智能是核心技术
思考与练习
- 想一想:在你生活的周围,有哪些地方已经或将要使用机器人?它们属于哪一类机器人?
- 查一查:你最感兴趣的机器人公司或产品是什么?它们使用了哪些核心技术?
- 议一议:具身智能的发展可能带来哪些伦理问题?人类应该如何应对?
参考资料
机器人历史
- 《机器人学导论》(Introduction to Robotics: Mechanics and Control) - John J. Craig
- IEEE Robotics and Automation Magazine
- 《罗梭的万能工人》(R.U.R.) - 卡雷尔·恰佩克 1920年
具身智能与大型模型
- Dadkhahi, H., et al. (2023). PaLM-E: An Embodied Multimodal Language Model. arXiv:2303.03378.
- Ahn, M., et al. (2022). Do As I Can, Not As I Say: Grounding Language in Robotic Affordances. arXiv:2204.01691.
- Liang, J., et al. (2023). Code as Policies: Language Model Programs for Embodied Control. arXiv:2209.07753.
- Brohan, A., et al. (2022). RT-1: Robotics Transformer for Real-World Control at Scale. arXiv:2212.06817.
- Brohan, A., et al. (2023). RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control. arXiv:2307.15818.
- Liu, H., et al. (2024). OK-Robot: Open Vocabulary Mobile Manipulation. arXiv:2401.01995.
- Song, S., et al. (2024). Manipulate Anything: Automating Robotic Manipulation in the Real World. arXiv:2404.03528.
强化学习与模仿学习
- Mnih, V., et al. (2013). Playing Atari with Deep Reinforcement Learning. NIPS 2013.
- Lillicrap, T. P., et al. (2016). Continuous Control with Deep Reinforcement Learning. ICLR 2016.
- Ross, S., et al. (2011). A Reduction of Imitation Learning to No-Regret Online Learning. AISTATS 2011.
- Bojarski, M., et al. (2016). End to End Learning for Self-Driving Cars. arXiv:1604.07316.
- Zhao, T. Z., et al. (2024). ALOHA: Learning to Do by Learning from Observation. CoRL 2024.
空间智能与3D理解
- Qi, C. R., et al. (2017). PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. CVPR 2017.
- NVIDIA (2024). GR00T: Generalist Robot 00 Foundation Model. NVIDIA GTC 2024.